Изобретение относится к дискретным следящим приводам с шаговым двигателем и гидравлическим усилителем момента.
Известны конструкции следящих приводов с щаговым двигателем без отрицательной обратной связи, а также с введением отрицатevTьнoй обратной связи.
К недостаткам известных конструкций относится сложность конструкции.
Предлагаемый электрогидравлический следящий привод отличается от известных тем, что с целью повыщения надежности и упрощения конструкции привода заслонка гидроусилителя укреплена на оси конического дифференциала, кинематически связанного с валом щагового двигателя, и через рычаг обратной связи со штоком гидродБИгателя.
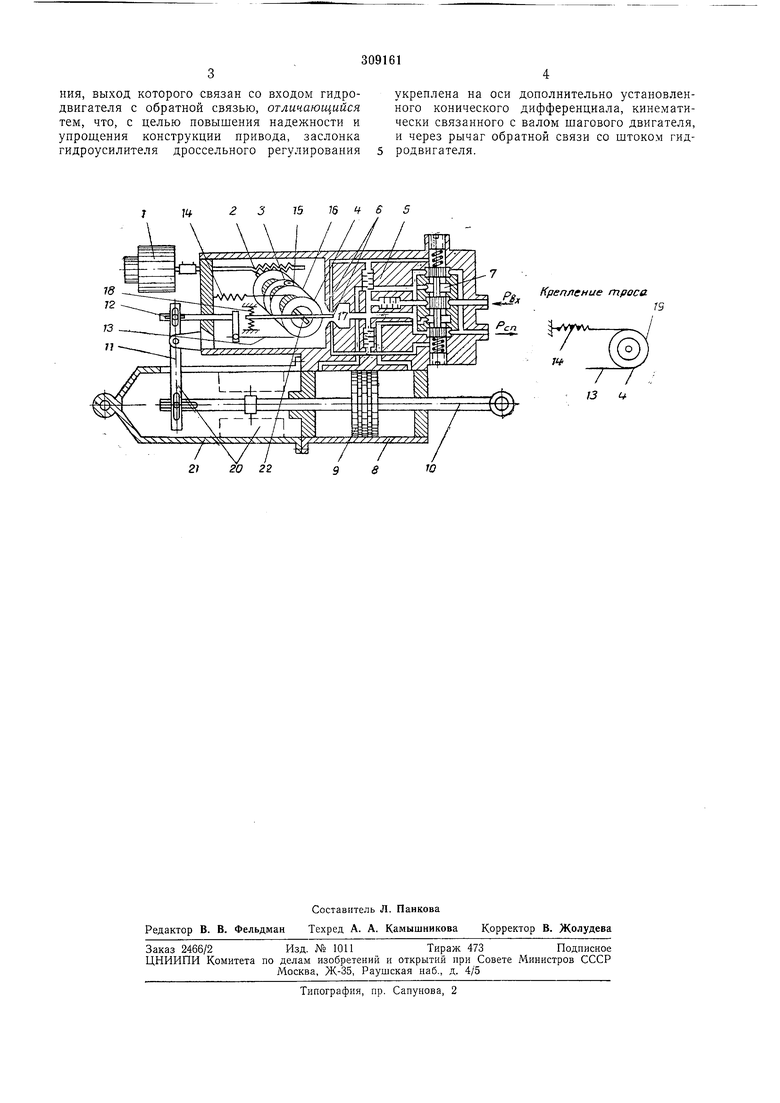
На чертеже приведена принципиальная схема предлагаемого привода.
Схема содержит шаговый двигатель /, червячный редуктор 2, конический дифференциал 3, шкив 4, гидроусилитель 5 дроссельного регулирования, сопла 6, золотник 7, гидродвигатель 8, поршень 9, шток 10, рычаг 11, тягу 12, трос 13, пружину 14, конические шестерни 15, дифференциал 16, заслонку 17, пружины 18, трос 19, обратную связь 20, опорный кожух 21, ось 22.
При отсутствии с} гнала шаговый двигатель / занимает строго фиксированное положение, и заслонка /7 гидроусилителя 5 дроссельного регулирования находится в нейтральном положенип. В управляющих камерах гидроусилителя 5 поддерживается равное давление, обеспечивающее нейтральное положение золотника 7 и определенное положение порщня 9 гидродвигателя 8.
При подаче сигнала на шаговый двигатель / последний через червячный редуктор 2 и конический дифференциал 3 поворачивает заслонку 17 на некоторый угол. В результате возникает перепад давления в управляющих
камерах гидроусилителя дроссельного регулирования, и золотник 7 вследствие этого перемещается, открывая доступ л идкости в гидродвигатель 8. Поршень 9 гидродвигателя перемещается и через кинематическую обратную
связь 20 и конический дифференциал обеспечивает возврашение заслонки в нейтральное положение. Положение поршня 9 гидродвигателя 8 определяется сигналом, поданным на шаговый двигатель /.
Предмет изобретения ния, выход которого связан со входом гидродвигателя с обратной связью, отличающийся тем, что, с целью повышения надежности и упрош.ения конструкции привода, заслонка гидроусилителя дроссельного регулирования 5 укреплена на оси дополнительно установленного конического дифференциала, кинематически связанного с валом шагового двигателя, и через рычаг обратной связи со штоком гидродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для обработки концов труб | 1982 |
|
SU1065088A1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| Электрогидравлический следящийпРиВОд | 1979 |
|
SU817326A1 |
| ПРИВОД ШПИНДЕЛЯ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1973 |
|
SU374126A1 |
| Копировальный станок | 1979 |
|
SU795898A1 |
| Гидравлический следящий привод | 1980 |
|
SU939844A1 |
| СПОСОБ ГИДРОУСИЛЕНИЯ ДИСТАНЦИОННОГО РУЛЕВОГО УПРАВЛЕНИЯ И СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2420421C2 |
| Суммирующий механизм | 1973 |
|
SU443207A1 |
| ПОЛУАВТОМАТ ДЛЯ ЗАТОЧКИ МНОГОЛЕЗВИЙНОГО | 1971 |
|
SU309582A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
Jщ2 3 }5 Ю 6 5 rV7 2/ го 22 р э Крепление траса. .
