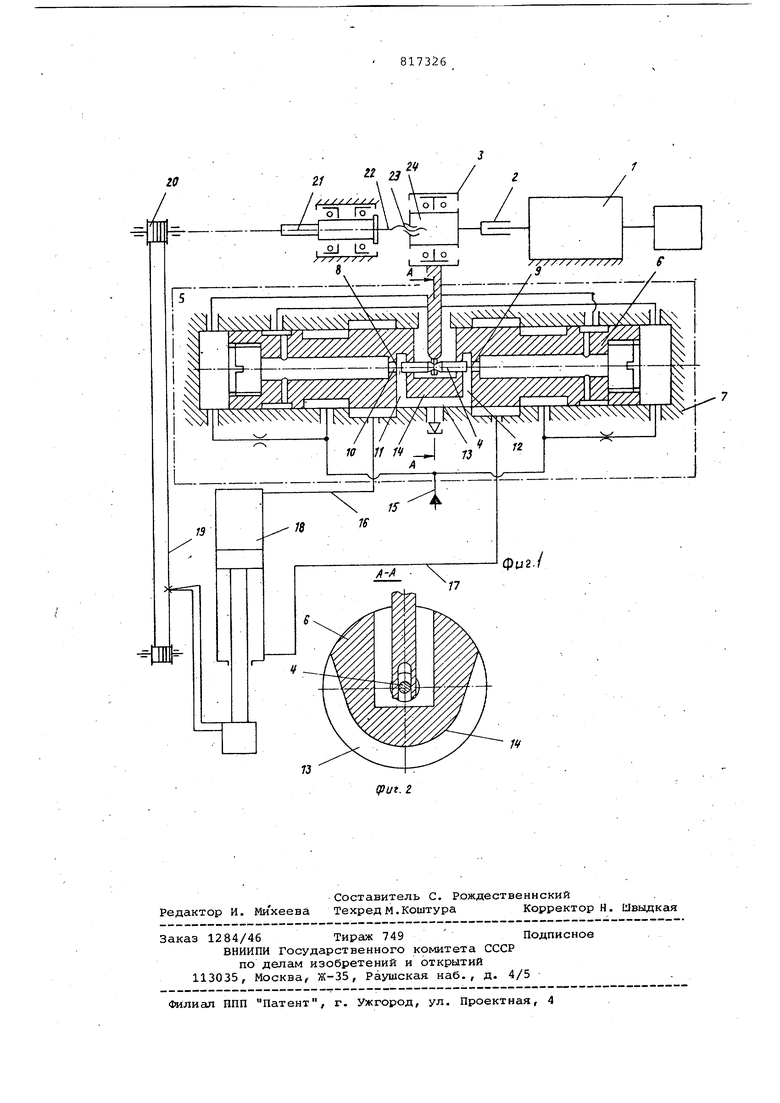
гидролинии 16 и 17 связывают его с гидродвигателем 18 снабженным устройством отрицательной обратной связи, состоящим из тросовой передачи 19, барабан 20 которой закреплен на валу 21 обратной связи. Вал 21 соединен с винтом 22 винтовой пары 23 механическрго суммирующего устройства 3. Гайка 24 винтовой пары 23 связана с заслонкой 4 и шлицевой парой 2.
Электрогидравлический следящий привод работает следующим образом.
При отсутствии управляющего сигнала шаговый двигатель 1 занимает . строго фиксированное положение и заслонка 4 Нс1ходится в нейтральном . положении, что обеспечивает установку в среднее положение золотника 6. Поршень гидродвигателя 18 при этом Нсосодится в неподвижном состоянии.
При подаче из системы управления .на шаговый двигатель 1 сигнала с Зсщанной частотой, определяющей скорость движения поршня.гидродвигателя 18, вал шагового двигателя чере шлицевре соединение 2 начинает вращать гайку 24 винтовой пары 23, винт 22 которой при этом остается неподвижным. В результате гайка 24 смещается в осевом направлении по шлицевому соединению 2. При этом смещается в осевом направлении и заслонка .4. В результате один из торцов золотника б соединяется со сливом.
Под действием появившегося перепада давленийна торцах золотника 6 последний смещается в направлении смещения управляющей заслонки 4. При этом через рабочие кромки золотника б по гидролиниям 16 и 17 происходит перераспределение давлений в полостя гидродвигателя 18. Поршень гидродвигателя 18 при своем движении через тросовую передачу 19 вращает барабан 20 и жестко связанный с ним вал 21 обратной связи . Совмещенный с валом 21 обратной связи винт 22 винтовой пары 23, вращаясь, стремится вернуть гайку 24 в исходное положение и, тем самым, вернуть в исходное положение заслонку 4.
В результате сойместного действия шагового двигателя 1 и вала 21 обр атной связи цилиндрическая заслонка 4 останавливается в какомто промежуточном положении.. В соответствующем положёнии находится и золотник 6 под торцами которого при этом вновь устанавливаются равные давления. Поршень гидродвигателя 18 двигается равномерно. При отключении входного сигнала, т. е. при остановке шагового двигателя 1, устройство
обратной связи через вал 21 возвращает заслонку 4 в нейтральное положение. Золотник 6 также устанавливается в среднее положение, что приводит к остановке поршня гидродвигателя 18.
Так как при подаче на шаговый двигатель 1 сигнала большой частоты, необходимого для получения большей скорости движения поршня гидродвигаQ теля 18, заслонка 4 имеет возможность прохода внутрь сопел, т. е. может смещаться на значительную величину без упора в сопло, в гидроусилителе 5 не происходит потери информации. При этом благодаря наличию об5 разованнойнеполно-кольцевой проточкой 14 и корпусом 17 сливной полости 13, общей для. первого и второго каскадов гидроусилителя 5, изолированной от электромеханического преобразователя 1, нет необходимости размещать для этой цели дополнительное уплотнение, что позволяет сократить габариты, а также повысить быстродействие и КПД следящего привода.
5 Применение предлагаемого изобретения в следящих системах промышленных -роботов/ позволяет значительно увеличить эффективность их использования.
Формула изобретения
Электрогидравлический следящий привод, содержащий электромеханический преобразователь, связанный с первым каскадом двухкаскадного гйдроусилителя, выполненным в-виде элемента сопло-заслонка, управляющего распределителем второго каскада, в золотнике которого выполнены сопла, и гидродвигатель, снабженньгй устройстврм отрицательной обратной связи, отличающийся тем, что, с целью сокращения габаритов и повы- ,
шения быстродействия и КПД, в золотнике распределителя второго каскада выполнена неполно-кольцевая проточка, образующая с корпусом гидроусилителя сливную полость, общую
для первого и второго каскадов, продольный осевой канал и поперечные пазы, сообщенные со сливной полостью, причем заслонка размещена в осевом канале с врзможностью прохода внутрь сопел, а последние образованы пересечением осевого канала и поперечных пазов.
Истрчники информации, принятые во внимание приэкспертизе 1 .-Авторское свидетельство СССР
№ 526723, кл. F 15 В 3/00, 1974. 1 I KSS 1 уу//}- 7т А .... ///Х-у/А / // / zr-1 / / ///х 7//у у1у лгХ//х1К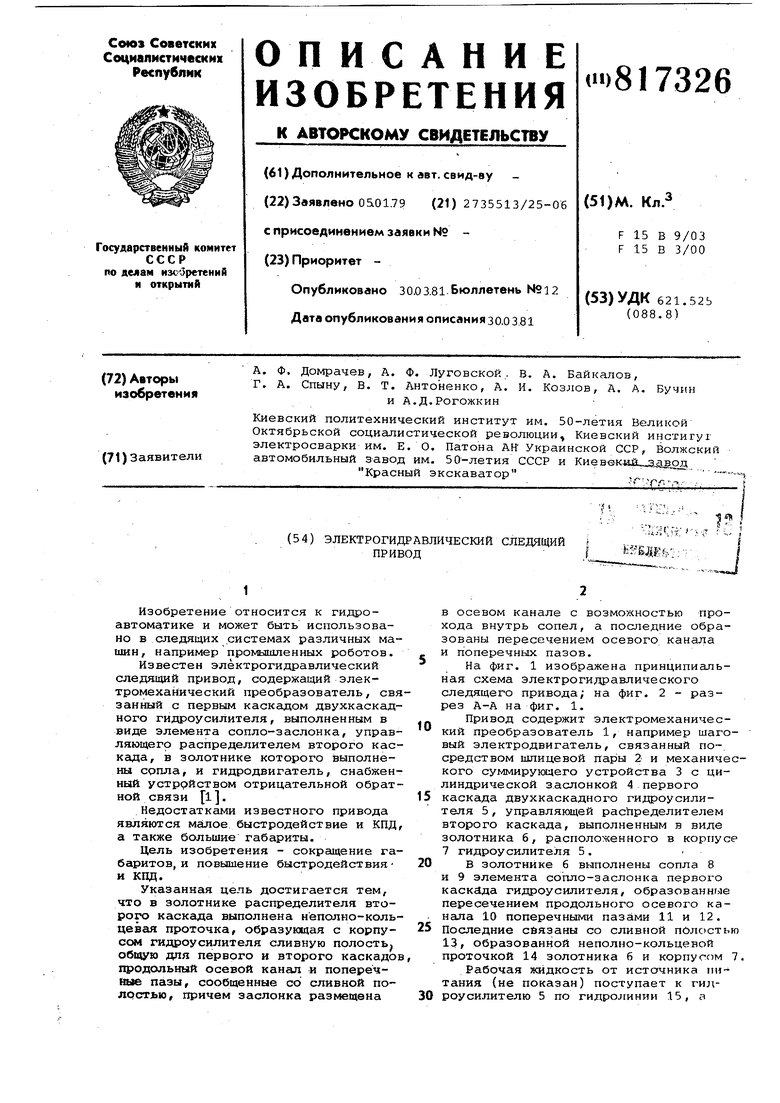
| название | год | авторы | номер документа |
|---|---|---|---|
| Суммирующий механизм | 1973 |
|
SU443207A1 |
| Гидравлический следящий привод | 1979 |
|
SU769112A1 |
| Гидравлический следящий привод | 1988 |
|
SU1560836A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| Электрогидравлический следящий привод | 1980 |
|
SU941701A1 |
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU309161A1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU746132A1 |
| Гидравлический следящий привод | 1982 |
|
SU1023151A1 |