Предлагаемое устройство относится к области судовой навигации, и в частности, к электромеханическим счетно-решающим автопрокладчикам пути.
Известны электромеханические счетно-решающие устройства, содержащие интегрирующий привод, счетно-решающий механизм и механическую нагрузку. В этих устройствах в качестве функционального счетно-решающего устройства применяется фрикционный мехаиизм. В любом фрикционном множителе передача от ведущего элемента к ведомому осуществляется за счет сил трения и поэтому чем больше механическая нагрузка на ведомом валу, тем больше погрешность решаемого алгоритма.
Предложенное устройство отличается от известных тем, что в него дополнительно введены блок необратимой передачи, усилитель мощности и моментный двигатель, причем второй вывод интегрирующего привода через последовательно соединенные усилитель мощности и моментный двигатель подсоединен к механической нагрузке, а блок необратимой передачи подключен между счетно-решающим механизмом и моментным двигателем.
Этим достигается повыщение точности работы счетно-решающих механизмов.
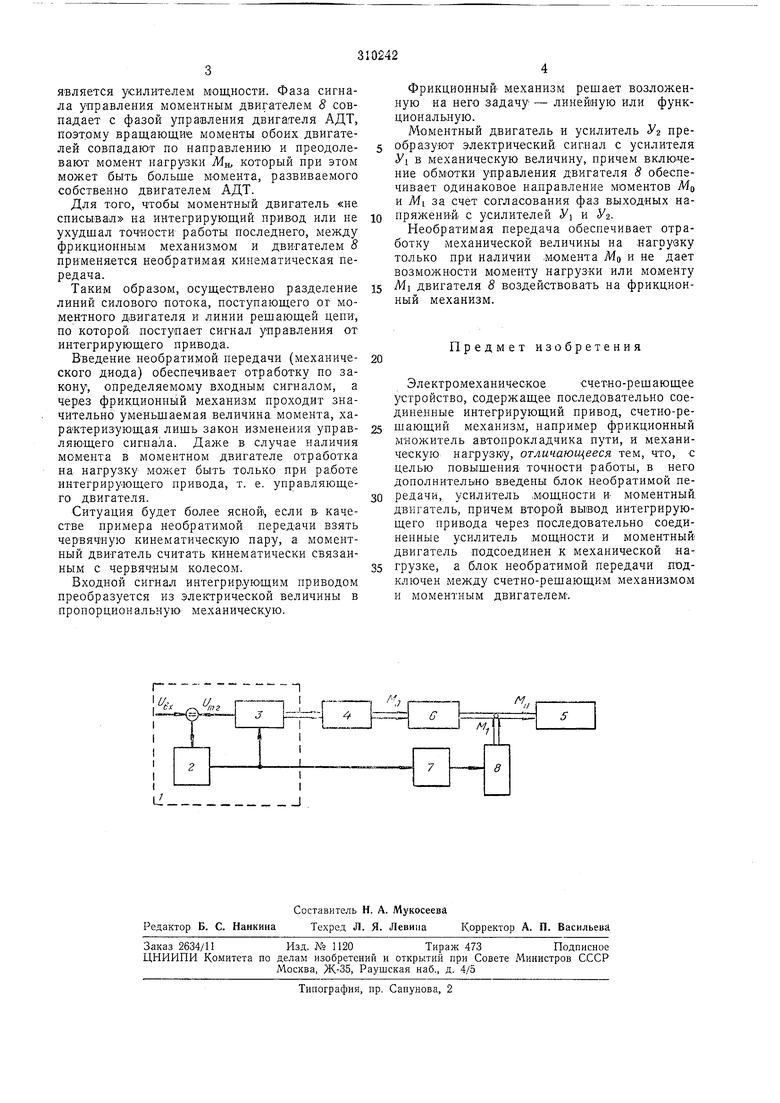
щий привод /, включающий усилитель 2 привода (Vi) и управляющий двигатель-тахогенератор (АДТ) 3; фрикционный механизм 4; механическую нагрузку 5, необратимую
передачу 6, усилитель мощности (2) 7 и моментный двигатель 8.
Предлагаемое устройство работает следующим образом.
Сигнал от входного устройства в виде напряжения переменного тока поступает на сравнение с напряжением, вырабатываемым тахогенератором агрегата АДТ. При рассогласовании амплитуды или фазы входного напряжения и напряжения тахогенератора
на усилитель У поступает входной сигнал, который после усиления поступает на обмотку управления двигателя АДТ и на усилитель У2- Под действием управляющего сигнала двигатель начинает вращаться, а тахогенератор при этом вырабатывает сигнал обратной связи. При сравнении входного напряжения t/Bx и напрял ения тахогенератора f/T.r.. т. е. при U-r.f наступает равновесное состояние схемы (1).
Выходной вал агрегата АДТ преобразует входной сигнал переменного тока в угол поворота, и эта величина поступает на решающий механизм - фрикционный множитель. Одновременно сигнал с выхода усилителя
является усилителем мощности. Фаза сигнала управления моментным двигателем 8 совпадает с фазой управления двигателя АДТ, поэтому вращающие моменты обоих двигателей совпадают по направлению и преодолеваЮТ момент нагрузки Мн, который при этом может быть больще момента, развиваемого собственно двигателем АДТ.
Для того, чтобы моментный двигатель «не списывал на интегрирующий привод или не ухудшал точности работы последнего, между фрикционным механизмом и двигателем 8 применяется необратимая кинематическая передача.
Таким образом, осуществлено разделение линий силового потока, поступающего от моментного двигателя и линии решающей цепи, по которой поступает си-гнал управления от интегрирующего привода.
Введение необратимой передачи (механического диода) обеспечивает отработку по закону, определяемому входным сигналом, а чер|ез фрикционный механизм проходит значительно уменьшаемая величина момента, характеризующая лишь закон изменения управляЮЩего сигнала. Даже в случае наличия момента в моментном двигателе отработка на нагрузку может быть только при ра.боте интегрирующего привода, т. е. управляющего двигателя.
Ситуация будет более ясной, если В качестве примера необратимой передачи взять червячную кинематическую пару, а моментный двигатель считать кинематически связанным с червячным колесом.
Входной сигнал интегрирующим приводом преобразуется из электрической величины в пропорциональную механическую.
Фрикционный- механизм решает возложенную на него задачу - линейную или функциональную.
Моментный двигатель и усилитель Уг преобразуют электрический сигнал с усилителя У в механическую величину, причем включение обмотки управления двигателя 8 обеспечивает одинаковое направление моментов MQ и MI за счет согласования фаз выходных напряжений с усилителей У) и Уа.
Необратимая передача обеспечивает отработку механической величины на .нагрузку только пр-и наличии .момента Afo и не дает возможности моменту нагрузки или моменту MI двигателя 8 воздействовать на фрикдионный механизм.
Предмет изобретения
Электромеханическое счетно-решающее устройство, содержащее последовательно соединенные интегрирующий привод, счетно-решающий механизм, например фрикционный множитель автопрокладчика пути, и механическую нагрузку, отличающееся тем, что, с целью повышения точности работы, в него дополнительно вв.едены блок необратимой передачи, усилитель ,мошности и. моментный, двигатель, причем второй вывод интегрирующего привода через последовательно соединенные усилитель |МоЩ|Ности и моментный двигатель подсоединен к механической нагрузке, а блок необратимой передачи подключен между счетно-решающим механизмом и моментным двигателем .
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU436326A1 |
| Устройство для отработки заданногоположения регулирующего органа | 1973 |
|
SU508779A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Установка для идентификации параметров двигателя постоянного тока | 2024 |
|
RU2828829C1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ | 1993 |
|
RU2072545C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Силовой следящий электропривод для управления угловым положением объекта | 1962 |
|
SU152011A1 |
Г
