1
Изобретение относится к следящим системам и приводам со скоростной обратной связью, иредназначенным для отработки угла или скорости, и может быть при1менено в счетно-решаюншх устройствах.
Известная следящая система содержит последовательно соединенные измерительно-преобразовательное устройство, первое сравнивающее устройство, пороговое устройство, усилитель мощности и двигатель, подключенный к датчику скорости и объекту управления, к выходу которого подключен в.код измерительно-преобразовательного устройства, генератор пилообразного напряжения, подключенный через второе сравнивающее устройство к другому входу первого сравнивающего устройства, и источник смещения.
Недостатком известной следящей системы является нелинейная зависимость пускового момента от сигнала paccoглacoiзaния М -/(е).
Целью предложения является повышение динамичеакой точности следящей системы.
Поставленная цель в предлагаемой следящей системе достигается за счет того, что она содержит последовательно соединенные корректирующее устройство и дополнительное сравнивающее устройство, другой вход которого подключен к выходу источника смещения, а выход - к друго.му входу второго сравнивающего устройства. Вход корректирующего устройства соединен с выходом датчи,ка скорости.
Такое построение системы позволяет линеаризовать характеристику (8) в зависимости от величины сигнала oKOipocTH смещением ее в определенных пределах вдоль оси абсцисс.
Пределы регулиравания определяются и.з
условия получения оптимальной линейности характеристики пускового момента двигателя от сигнала рассогласования. Практически выбор ма;ксимальной величины смещения характеристики осуществляется из условия получе
ния изменения коэффициента усиления усилительного устройства в заданных пределах. Подстраивание характеристики М - f (к) в зависимости от скорости дает возможность учесть и скомпенсировать нелинейности, связанные с нелинейностью применяемых усилителей, нелинейностью преобразования сигнала рассогласования в напряжении, и нелинейности применяемого способа управления, т.е. при введении управляемого смещения коэффициент усиления в динамике при малых сигналах рассогласования остается таким же, как и при больщих сигналах. В статике энергетика следящей системы не отличается от энергетики следящей системы без скоростной обратной
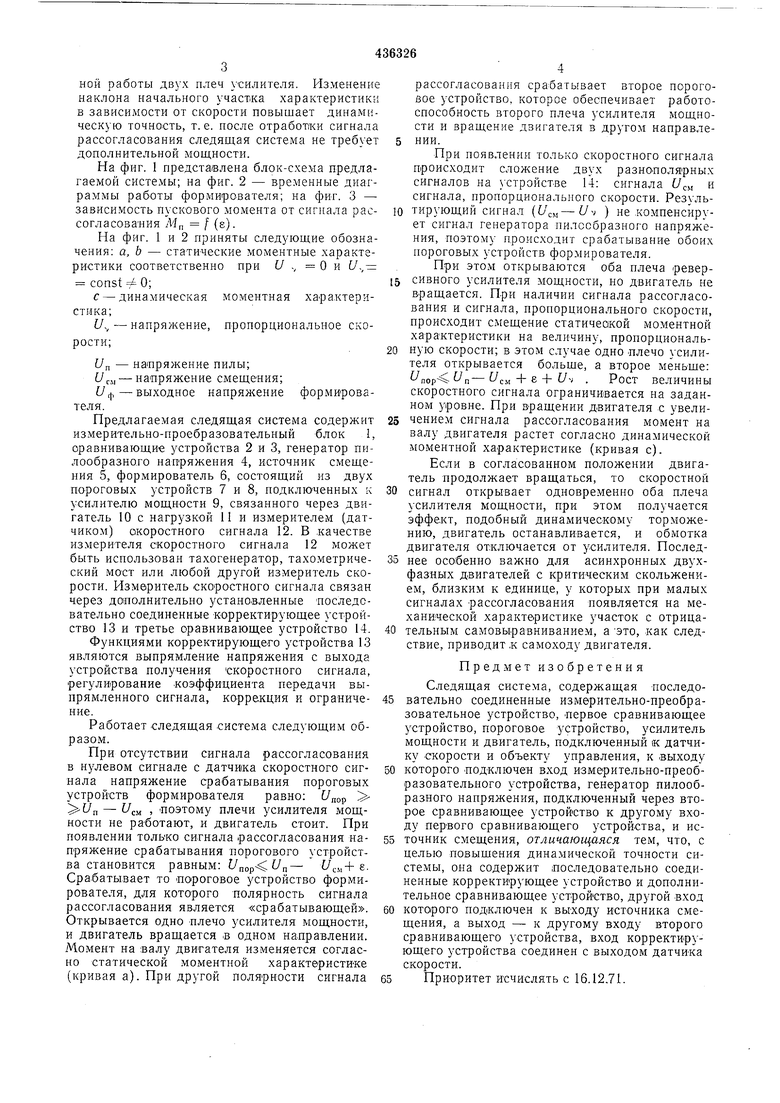
связи, т. е. отсутствуют участки одновремен3ной работы двух плеч усилителя. Изменение наклона начального участка характеристик: в зависимости от скорости повышает динами ческую точность, т.е. после отработки сигнала рассогласования следящая система не требует дополнительной мощности. На фиг. 1 представлена блок-схема предлагаемой системы; на фиг. 2 - временные диаграммы работы формирователя; на фиг. 3 - зависимость пускового момента от сигнала рассогласования Л1п f (s). На фиг. 1 и 2 приняты следующие обозначения: а, b - статические моментные характеристики соответственно при L/ ,, О и {7,,- const 0; с - динамическая моментная характеристика;и., - напряжение, пропорциональное скорости;и„ - напряжение пилы; УСЦ - напряжение смещения; t/ф-выходное напряжение формирователя. Нредлагаемая следящая система содержит измерительно-проебразовательный блок 1, сравнивающие устройства 2 и 3, генератор пилообразного напряжения 4, источник смещения 5, формирователь б, состоящий из двух пороговых устройств 7 и 8, подключенных к усилителю мощности 9, связанного через двигатель 10 с нагрузкой 11 и измерителем (датчиком) скоростного сигнала 12. В .качестве измерителя скоростного сигнала 12 может быть использован тахогенератор, тахометрический мост или любой другой измеритель скорости. Измеритель скоростного сигнала связан через дополнительно установленные последовательно соединенные корректирующее устройство 13 и третье сравнивающее устройство 14. Функциями корректирующего устройства 13 являются выпрямление напряжения с выхода устройства получения скоростного сигнала, регулирование коэффициента передачи выпрямленного сигнала, коррекция и ограничение. Работает следящая система следующим образом. При отсутствии сигнала рассогласования в нулевом сигнале с датчика скоростного сигпала напряжение срабатывания пороговых устройств формирО|Вателя равно: t/nop п - 01 поэтому плечи усилителя мощности не работают, и двигатель стоит. При появлении только сигнала рассогласования напряжение срабатывания порогового устройства становится равным: f/nop п- см+е. Срабатывает то пороговое устройство формирователя, для которого полярность сигнала рассогласования является «срабатывающей. Открывается одно Плечо усилителя мощности, и двигатель вращается .в одном направлении. Момент на валу двигателя изменяется согласно статической моментной характеристике (кривая а). При другой полярности сигнала
4 рассогласования срабатывает второе пороговое устройство, которое обеспечивает работоспособность второго плеча усилителя мощности и вращение двигателя в другом направлении. При появлении только скоростного сигнала происходит сложение двух разнополярных сигналов на устройстве 14: сигнала /см и сигнала, пропорционального скорости. Результирующий сигнал (Ос„- v ) не .компенсирует сигнал генератора пилообразного напряжения, поэтому происходит срабатывание обоих пороговых устройств формирователя. При этом открываются оба плеча реверсивного усилителя мощности, но двигатель не вращается. При наличии сигнала рассогласования и сигнала, пропорционального скорости, происходит смещение статической моментной характеристики на величину, пропорциональную скорости; в этом случае одно плечо усилителя открывается больше, а второе меньше: пор п- t/cM + е + t/v . Рост величины скоростного сигнала ограничивается на заданном уровне. При вращении двигателя с увеличением сигнала рассогласования момент на валу двигателя растет согласно динамической моментной характеристике (кривая с). Если в согласованном положении двигатель продолжает вращаться, то скоростной сигнал открывает одновременно оба плеча усилителя мощности, при этом получается эффект, подобный динамическому торможению, двигатель останавливается, и обмотка двигателя отключается от усилителя. Последнее особенно важно для асинхронных двухфазных двигателей с критическим скольжением, близким к единице, у которых при малых сигналах рассогласования появляется на механи:ческой характеристике участок с отрицательным самоБЫравниванием, а это, как следствие, приводит .к самоходу двигателя. Пред.мет изобретения Следящая система, содержащая последовательно соединенные измерительно-преобразовательное устройство, первое сравнивающее устройство, пороговое устройство, усилитель мощности и двигатель, подключенный к датчику скорости и объекту управления, к выходу которого подключен вход измерительно-преобразовательного устройства, генератор пилообразного напряжения, подключенный через второе сравнивающее устройство к другому входу первого сравнивающего устройства, и источник смещения, отличающаяся тем, что, с целью повышения дина.мической точности системы, она содержит последовательно соединенные корректирующее устройство и дополнительное сравнивающее устройство, другой вход которого подключен к вьгходу источника смещения, а выход - к другому входу второго сравнивающего устройства, вход корректирующего устройства соединен с выходом датчи-ка скорости. Приоритет исчислять с 16.12.71.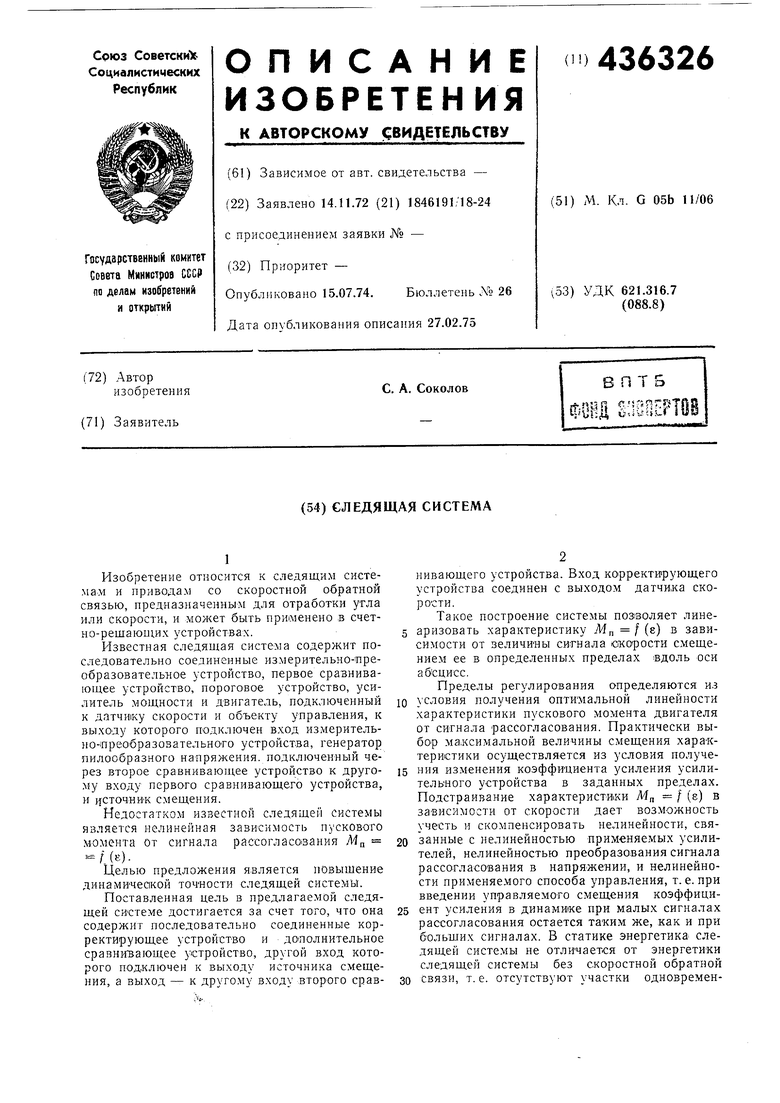
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU752224A1 |
| Следящий электропривод | 1980 |
|
SU974333A1 |
| СЛЕДЯЩАЯ СИСТЕМА С ЦИФРОВЫМ ОТСЧЕТОМ | 1972 |
|
SU419730A1 |
| Следящая система | 1979 |
|
SU840798A1 |
| Следящая система | 1983 |
|
SU1166056A2 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Усилитель мощности класса Д | 1986 |
|
SU1336198A2 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Следящая система позиционирования | 1982 |
|
SU1095132A1 |
Фиг s
