Изобретение относится к устройствам для управления рабочим органом мостового крана.
Известны устройства для наведення рабочего органа мостового крана на обрабатывае)мый объект, содержащие оптический .принель:ный механизм.
Предлагаемое устройство отличается тем, что, с целью упрош,ения процесса наведения, онтичеокий прицельный механизм снабжен корректирующим приспособлением, связа 1ным носредством сельсшпюй передачи с механизмом регулирования ли«ни визирования прицела.
Привод сельсин-датчика выполнен в виде бесконечно замкнутой цепи, взаимодействующей с пальцем, закрепленным на грузовой тележке, а нривод оптического прицела вынолиеи из сельсин-приемЕШка, редуктора и вала, на котором укреплены лекала, связанные посредством подпружиненных тяг с ручками горизонтальнон и вертикальной коррекций прицел а.
На фиг. 1 и 2 изображен мостовой кран с описываемым устройством; на фиг. 3 - схема тривода сельсин-датчика; на фиг. 4 - схема привода регулировочных ручек прицела.
В / мостового крана 2 установлен оптнческий прицельный механизм ., который управляет рабочим органом, нанрнмор бойным
iHapOM 4. подвенюнным па грузовой тележке 5 крана.
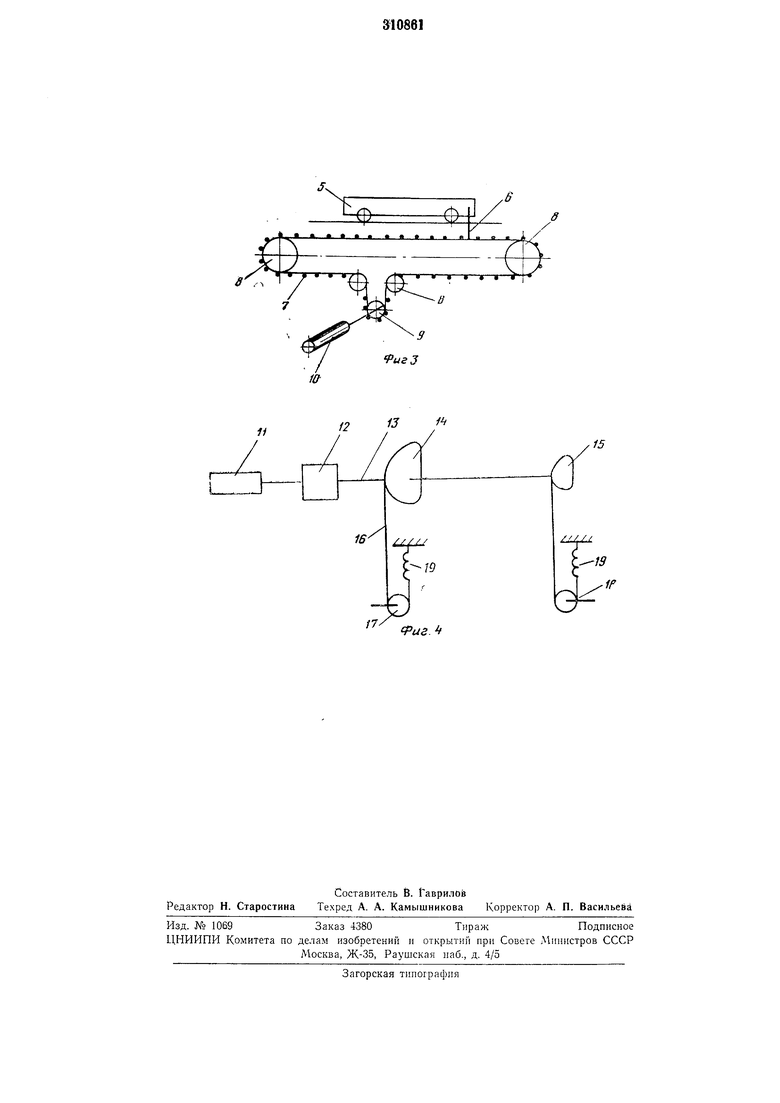
Оптнческнй прицельный меха:1нзм снабжен корректирующнм прнснособлением с приводом сельсин-датчика (см. . 3), который представляет собой крепле и1ый па тележке 5 вед ни1Й палец 6 и бесконечную цепь 7, которая через обводные ролнкн S сг.язат со звездочкой 9, уста11овлен:-1ой на вал} се,1ьс 1н-датчпка }0.
Прнвод регул-ировочных ручек прчщела (см, фиг. 4) состоит нз сельснн-приемника //, редуктора 12, вала 13, на котором укреплены лекала М п /5. Последппе посредством гибких связей Ifi спязапы с ручками /7 н 18 горнзонтальпой н псртикальиой коррекций прицела.
1-1атя ке;п1е гнбклх связей осхлцеств.чяегся нружннамн 19.
Размер и профиль лекал зависит от пролета крана, от шнрнны рабочего места 20 п от расстояпня между осью кабины п осью, нроL Больходящей через центр бойного щара в вертишое лекало служит для коррекции кальпой плоскоетн. так как тележка 5 перемен;ается вдоль ишрииы рабочего места, заставляя неремендаться прицел посредством сельсннной еистемь: в вертикальной плоскости на полое значнтсльмьп To.i по c inii;ieHHio е углом отклонения нридела в г(ризо 1тальн10 1 плоскости.
При перемещении тележки 5 лад рабочим местом, ведущий иалец 6, находится в иостоЯнном заценлеиии с бесконечной цепью 7. При выходе тележки за пределы ширины рабочего места 20, происходит расцепление пальца 6 с цепью, которая после этого остается все время в аафиксированиом положении. При обратном входе тележки на рабочий участок происходит зацепление цени пальцем. Цепь связана с сельсип-датчиком W через звездочку Р.
Исходя из допустимого угла рассогласования сельсинов порядка 1,5, выбирается количество оборотов сельсип-датчика, которое должно быть пропорциональным желаемо:
T04iHOCTH.
С такой точностью сельсиН-прие: 1ник // передает через редуктор 12 вращение валу I-). Укрепленные на пем лекала М п , кривые noBeipxiiocTu которых еоответсавуют закопал изменения лннпн виз1фова 1ия прицела, Р. зависимости от расноложения тележки над рабочим jMccTOM посредством гибких связей 16 вращают ручки 17 н 18 настройки прицела.
TaiaiM образом, во isce в)емя работы тележ.ки над рабочим местом будет фиксироваться и сохраняться точка, представляющая собой пересечение проекцни центра копровой бабы и линии Впзировання оптического ирицела в нлоскости рабочего места 20.
П з е д м е т изобретения
1.Устройство для наведения рабочего органа мостового крапа на обрабатываемый
объект, содержащее оптический прицельный мехапизм, отличающееся тем, что, с целью упрощения ироцесса на.веден.ия, оптический прицельный механизм снабжен корректирующим приспособлением, связапным посредством
еельсииной передачи с механизмом регулировапня липпи визирования прицела.
2.Устройство но п. 1, отличающееся тем, что, привод сельсин-датчнка выполнен в виде бесконечно замкнутой цени, взапмодействующей с пальцем, закрепленным па грузовойтележке, а привод оптического прицела выполнен из сельсип-приемпика, редуктора и вала, на котором укренлепы лекала, связанные посредством нодиружиненных тяг с ручками горизоптальпой и иертикальпой коррекций прпн.ела.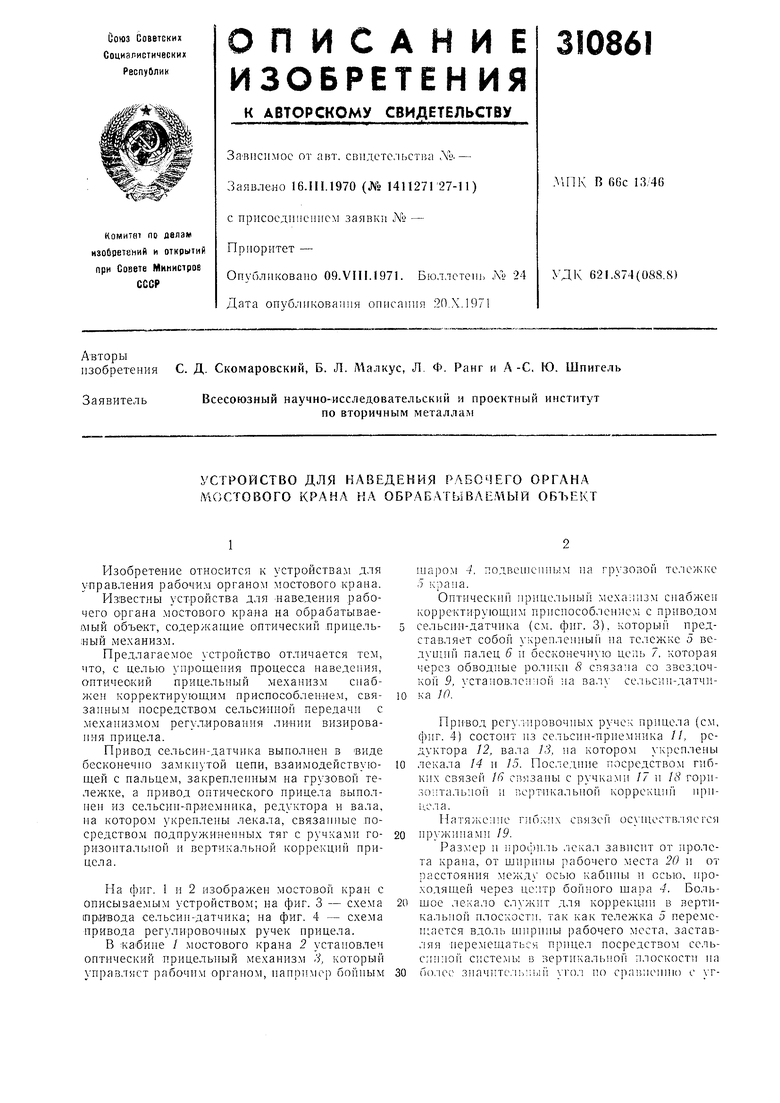
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2013 |
|
RU2526292C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| ТАНК | 2001 |
|
RU2218543C2 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| БОЕВОЕ ОТДЕЛЕНИЕ БРОНИРОВАННОЙ МАШИНЫ | 2003 |
|
RU2258889C2 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2839637C1 |
| ТАНК С ЗЕНИТНЫМ ВООРУЖЕНИЕМ | 2002 |
|
RU2231737C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕКОСА ОПОР КОЗЛОВОГО КРАНА | 1966 |
|
SU187273A1 |
// 7 / 7
faz. 2 20
