Известны устройства для автоматического контроля перекоса опор козлового крана, содержащие сельсины-датчики, связанные с ходовыми тележками опор крана, и сельсинприемник, включенный по дифференциальной схеме и соединенный с указательным механизмом.
Особенностями предлагаемого устройства, предназначенного для той же цели, является то, что указательный механизм выполнен в внде поворотной стрелки, которая закреплена на роторе сельсина-приемника и при недопустимом угле наклона крана взаимодействует посредством расположенного на ее нижнем конце ролика с микропереключателями привода ходовой части крана.
Микропереключатели смонтированы на рамках-задатчиках, поворачивающихся с помощью рычажной системы относительно диска со шкалой допустимых углов перекоса. При поворотах рамки-задатчики фиксируют необходимый угол перекоса и изменяют зазор между микропереключателями и нажимным роликом стрелки.
Ролик смонтирован эксцентрично относительно оси крепления стрелки и взаимодействует с микропереключателями через нажимные рычаги, шарнирно закрепленные между ними на рамках-задатчиках.
чивается точность показаний, обеспечивается возможность изменения пределов допустимого перекоса крана и повышается надежность подачи команд в цепь управления механизмами передвижения крана.
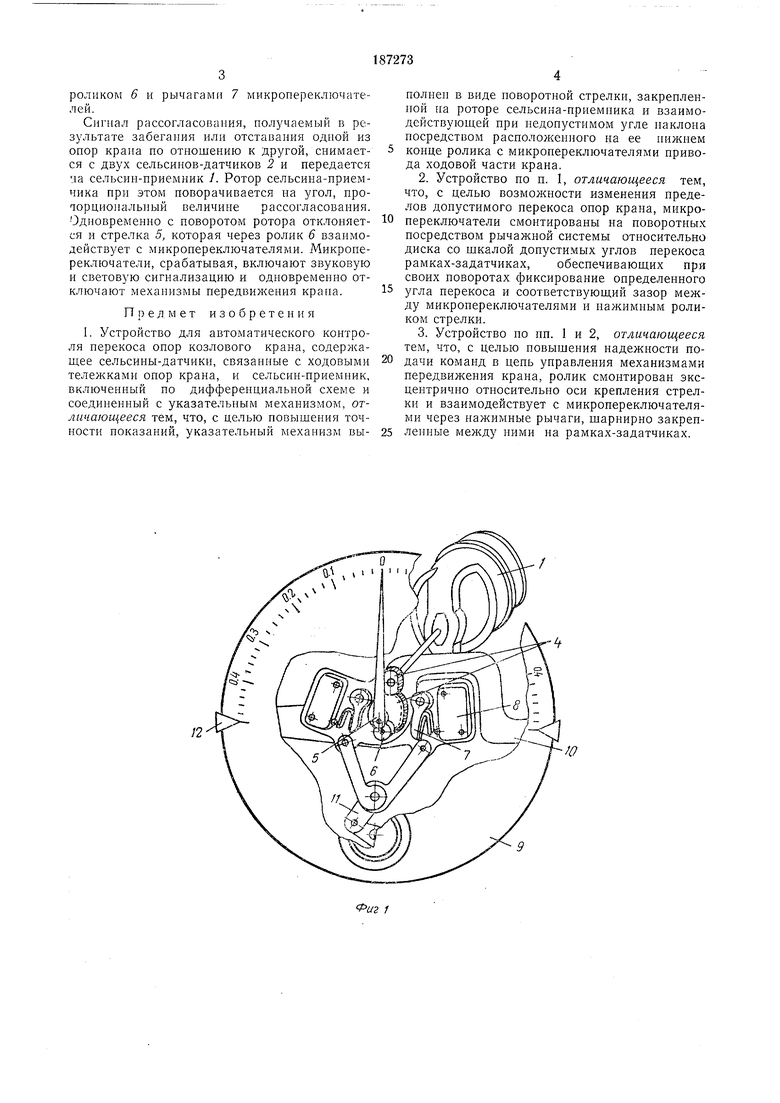
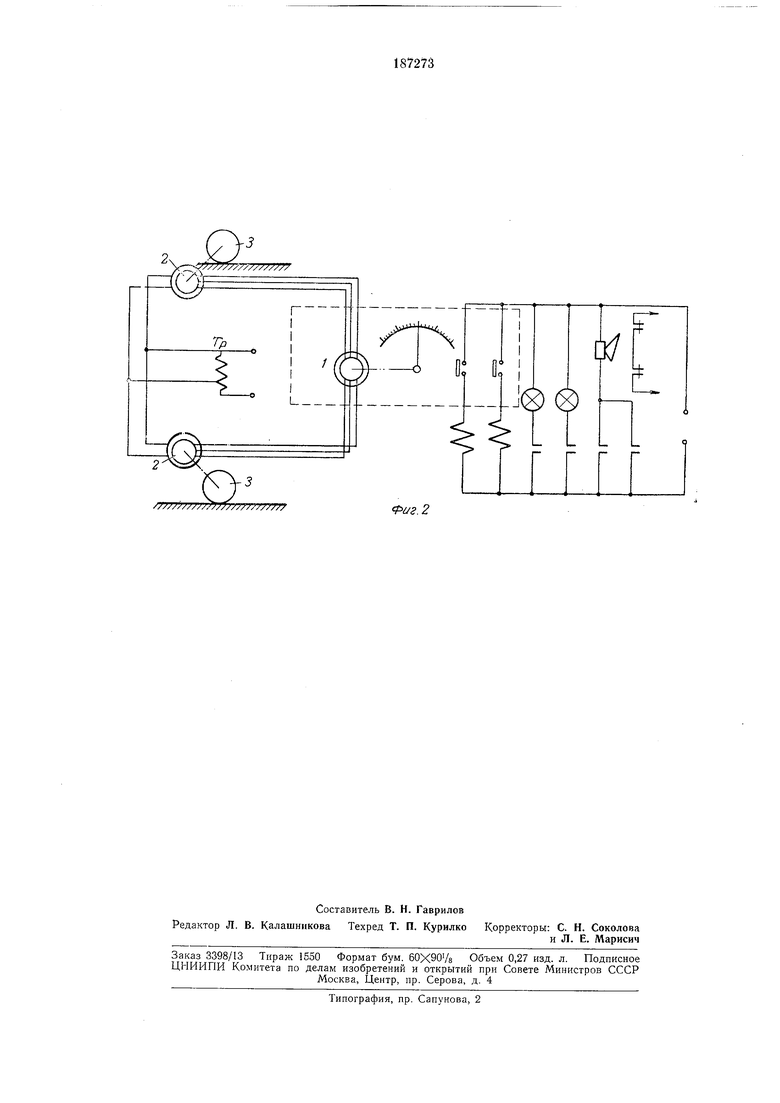
На фиг. 1 изображено описываемое устройство; на фиг. 2 - электрическая схема его включения.
Устройство состоит из сельсина-приемника /, связанного с сельсинами-датчиками 2, жестко соединенными с холостыми катками 3 тележек для передвижения опор крана.
Ось сельсина-приемника через понижающую зубчатую передачу 4 соединена со стрелкой 5, указывающей величину перекоса опор крана.
На оси стрелки эксцентрично смонтирован ролик 6, при предельных отклонениях стрелкп взаимодействующий с нажимными рычагами 7, которые при этом перемещают штоки микропереключателей 8 до их срабатывания.
Задающий механизм предела допустимого перекоса опор состоит из новоротных относительно диска 9 рамок-задатчиков 10, на которых закреплены микропереключатели 8 и нажимные рычаги 7. Рамки-задатчики поворачиваются системой рычагов 11.
роликом 6 и рычагами 7 микропереключателей.
Сигнал рассогласогиишя, получаемый в результате забегапия или отставания одной из опор крана по отношению к другой, снимается с двух сельсинов-датчиков 2 и передается да сельсин-приемник 1. Ротор сельсипа-приемчика при этом поворачивается на угол, проаорциональный величине рассогласовапия. Одновременно с поворотом ротора отклоняется и стрелка 5, которая через ролик 6 взаимодействует с микропереключателями. Микропереключатели, срабатывая, включают звуковую и световую сигнализацию и одновременно отключают механизмы передвижения крапа.
Предмет изобретения
1. Устройство для автоматического контроля перекоса опор козлового крана, содержащее сельсины-датчики, связанные с ходовыми тележками опор крана, и сельсин-приемник, включенный по дифференциальной схеме и соединенный с указательным механизмом, отличающееся тем, что, с целью повышения точности показаний, указательный механизм выполнен в виде поворотной стрелки, закрепленной на роторе сельсина-приемника и взаимодействующей при недопустимом угле паклона посредством располо кенного на ее нижнем конце ролика с микропереключателями привода ходовой части крана.
2.Устройство по п. 1, отличающееся тем, что, с целью возможности изменения пределов допустимого перекоса опор крана, микропереключатели смонтированы на поворотных посредством рычажной системы относительно диска со шкалой допустимых углов перекоса рамках-задатчиках, обеспечивающих при своих поворотах фиксирование определенного угла перекоса и соответствующий зазор между микропереключателями и нажимным роликом стрелки.
3.Устройство по пп. 1 и 2, отличающееся тем, что, с целью повышения надежности подачи команд в цепь управления механизмами передвижения крана, ролик смонтирован эксцентрично относительно оси крепления стрелки и взаимодействует с микропереключателями через нажимные рычаги, шарнирно закрепленные ними на рамках-задатчиках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель перекоса мостового крана | 1977 |
|
SU691381A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА С НАПОРНЫМ СВАЙНЫМ ХОДОМ | 1969 |
|
SU242761A1 |
| Козловой кран | 1977 |
|
SU691383A1 |
| Устройство для синхронизации механизмов передвижения крана | 1984 |
|
SU1253939A1 |
| Устройство для синхронизации механизмов передвижения опор крана | 1982 |
|
SU1039856A1 |
| ОГРАНИЧИТЕЛЬ ПЕРЕКОСА ОПОР КРАНА МОСТОВОГО ТИПА | 1993 |
|
RU2061645C1 |
| Устройство для управления гидроприводами механизмов передвижения крана мостового типа | 1980 |
|
SU901241A1 |
| Устройство синхронизации механиз-MOB пЕРЕдВижЕНия KPAHA | 1978 |
|
SU798021A1 |
| Устройство для определения положения опоры крана относительно подкранового пути | 1981 |
|
SU971775A1 |
| Устройство для ограничения перекоса опор крана | 1982 |
|
SU1027131A1 |
/-r
6/
(риг. 2
