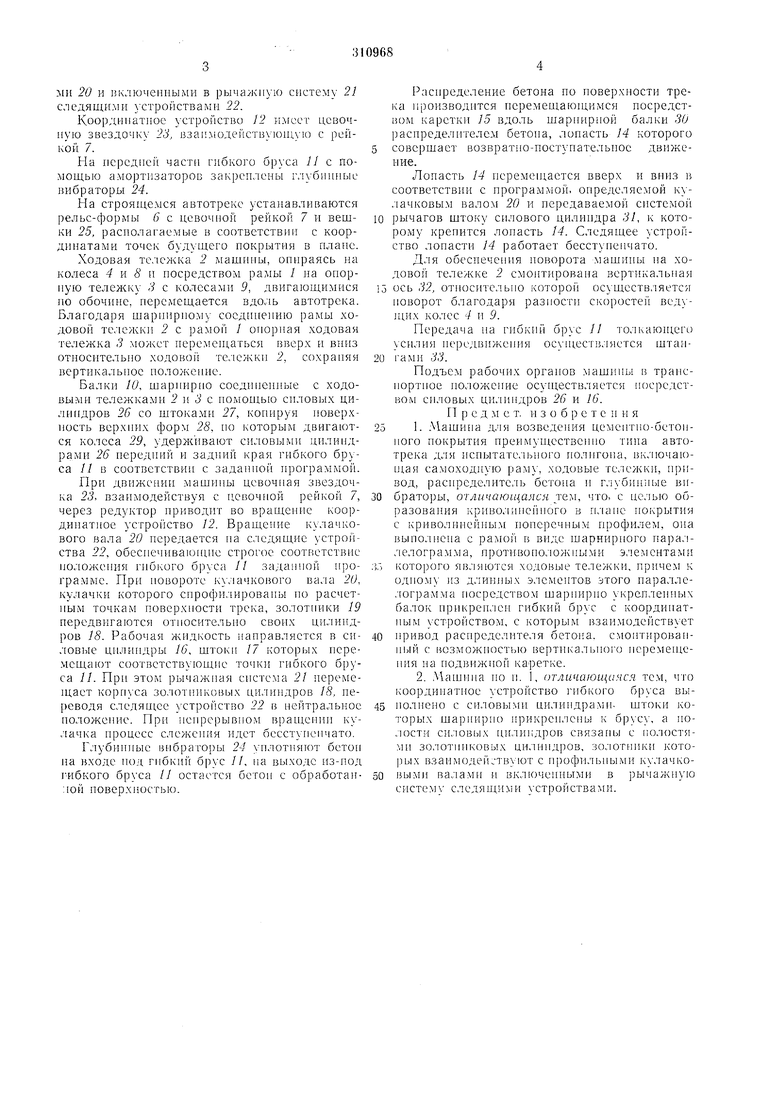
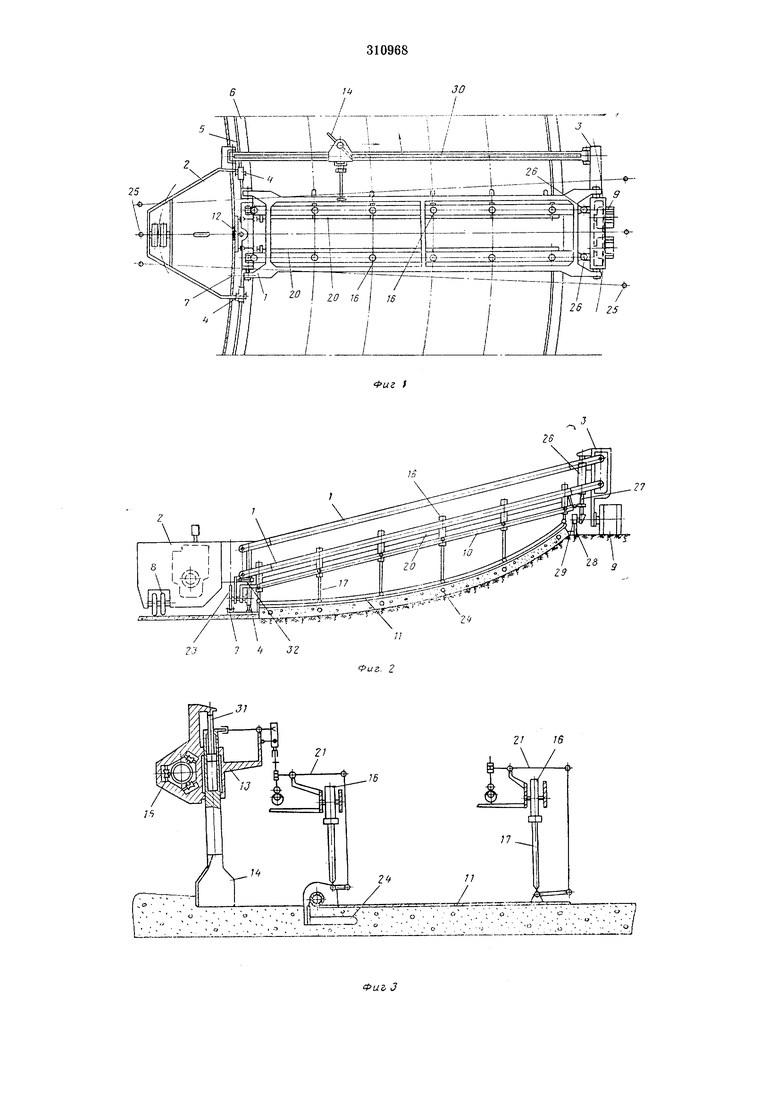
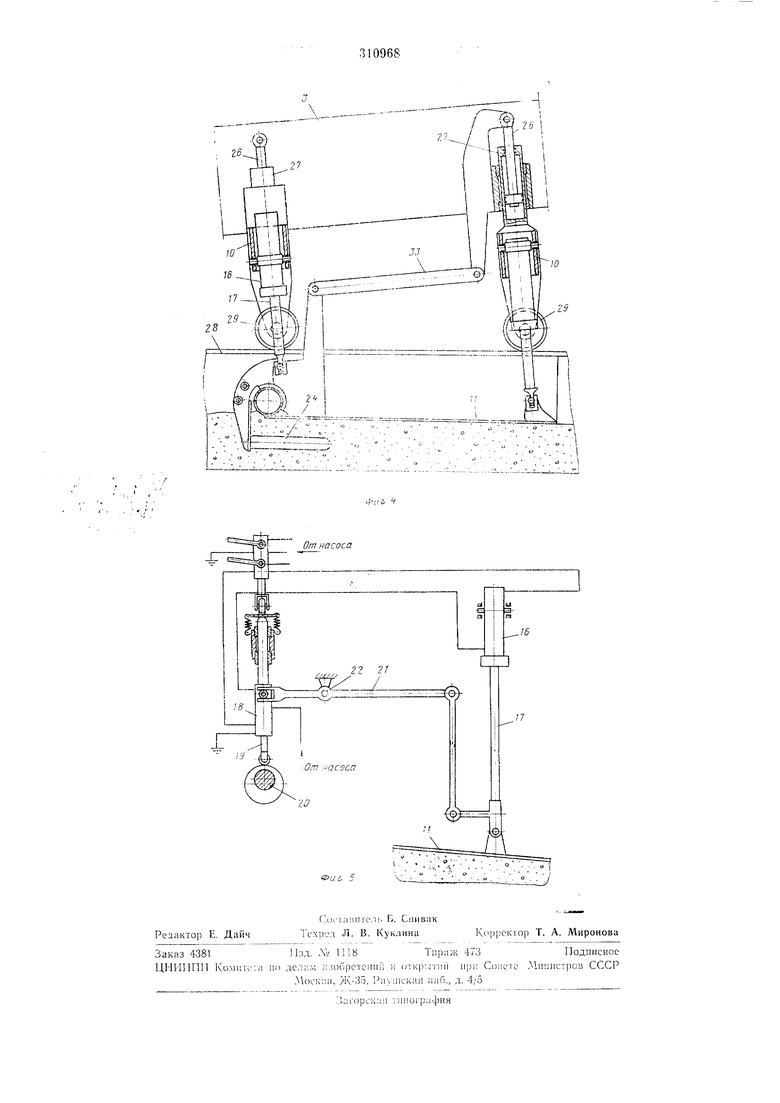
Известна машина для возвед,ения цементно-бетонного покрытия преимущественно типа автотрека для иеиытательиого полигона, включающая самоходную раму, ходовые тележки, иривод, раснределитель бетона и глубииные вибраторы. В известной машине отсутствуют приспособления, позволяющие бетонировать покрытие криволинейное в плане и имеющее криволинейный поперечный профиль. Предлагаемая мащииа с целью образования криволинейного в плане покрытия с криволинейным ноиеречным профилем выполнена с рамой в виде шарнирного параллелограмма, нротивоположными элементами которого являются ходовые тележки. К одному нз длинных элементов этого параллелограмма носредством шарннрно укрепленных балок прикреплен гибкий брус с координатным устройством, с которым взаимодействует привод распределителя бетона, смонтированный с возможностью вертикального перемещения на подвижной каретке. При этом координатное устройство гибкого бруса вынолнеио с силовыми цилиндрами, штоки которых шариирно прикреплены к брусу, а полости силовых цилиндров связаны с полостями золотниковых цилиндров, золотники которых взаимодействуют с профильными кулачковыми валами и включенными в рычажную систему следящими устройствами. Па фиг. 1 изображена машина в плане; на фнг. 2 - то же, вид сзади; на фиг. 3 - схематическнй разрез по рабочнм органам машины; на фиг. 4 - разрез но гибкому брусу и силовым цилиндрам; на фиг. 5 - схема координатного и следящего устройства. Машина содержит самоходную раму 7, выполненную в виде шарнирного параллелограмма, противоположными элемента.ми которого являются ходовые тележки 2 и 3. Ходовая тележка .2 имеет ведуиию колеса 4. устаиовлеиные на рельсах 5 рельс-формы б, снабл енной цевочной рейкой 7, и колеса 8, а ходовая тележка 3 имеет колеса 9. Па одном из длннных элементов самоходной рамы / посредством шарннрно укрепленных балок 10 ирнкренлен гибкий брус // с коордннатны.м устройством 12, с которым взаимодействует нрнвод 13 раснределителя бетона с лонастью 14, смонтированный с возможностью вертикального перемещения на каретке /5. Коордииатное устройство выполнено с силовыми цилиидрамн /6, штокн 17 которых шарнирно прикреплепы к гибкому брусу У/, а иолости связаны с полостями золотниковых цилиндров 18, золотники 19, которых взаимодействуют с нрофильнымн кулачковыми валаMil 20 и И1 лючениыми в рычажную систему 21 следящн.мн ттройствами 22.
Координатное устройство 12 имеет цевочную звездочку 23, взап.моденствуюниЮ с рейкой 7.
На передней части гибкото бруса 11 с помощью амортизаторов закреплены г,:1убинные вибраторы 24.
На строящемся автотреке устанавливаются рельс-формы 6 с цевочной рейкой 7 ц вешки 25, раснолагаемые в соответствии с координатами точек будущего покрытая в плане.
Ходовая тележка 2 машины, оиираясь на колеса 4 и 8 и иосредством рамы 1 на опориую тележку 3 с колесами 9, двигающимися по обочипе, перемещается вдоль автотрека. Благодаря щар1триому соединеиию рамы ходовой те.чежки 2 с рамой / опорная ходовая тележка 3 может перемепхаться вверх и вниз относительно ходовой тележки 2, сохраняя вертикальное положение.
Балки 10, шарнирпо еоединенные с ходовыми тележками 2 и 3 с номоп1ыо силовых цилиндров 26 со штоками 27, копируя поверхность верхних форм 28, ио которым двигаются колеса 29, удерживают силовыми цилиндрами 26 иередпий и задний края гибкого бруса // в соответствии с заданной нрограммой.
Нри движении машины цевочная звездочка 23, взаимодейетвуя с цевочной рейкой 7, через редуктор приводит во вращение координатное ycTpoiiCTBo 12. Вращение кулачкового вала 20 передается па следящие устройства 22, обеспечивающие строгое соответствие ноложе1щя гибкого бруса // заданной программе. При повороте кулачко1Юго вала 20, кулачки которого спрофи; ировапы но раечетпым точкам поверхности трека, золотщ1ки 19 передвигаютея относительно евоих цилиндров 18. Рабочая жидкость нанравляетея в силовые цилиндры 16, штоки /7 которых нере.мещают соответствующие точки гибкого бруса 11. При этом рычажная система 21 перемещает корнуеа золотщпчовых цилиндров 18, переводя следящее уетройетво 22 в нейтральное положение. При непрерывном врапденгп кулачка процесс ележенця идет бееступеичато.
Глубипиые вибраторы 24 уплотняют бетоп на входе нод гибкий брус 1, па выходе из-под гибкого бруса // остается бетой с обработанной новерхпоетью.
Распределение бетона ио иоверхноети трека производится иеремещающимся посредством каретки 15 вдоль шарпирной балки 30 раснределителем бетоиа, лоиасть 14 которого
совершает возвратно-поступательное движепие.
Лопаеть 14 перемеи1ается вверх и вииз в соответствии с программой, определяемой ку.тачковым валом 20 и передаваемой сиетемо1
рычагов штоку силового цилиидра 31, к которому крепится лопасть 14. Следящее устройство лопасти 14 работает беестуиепчато.
Д;1я обеспечения новорота машины на ходовой тележке 2 смонтирована вертикальная ось 32, относительно KOTOpoii осуществляется поворот благодаря разностп CKOpocTeii вед щпх колее / и 9.
Передача на гибкий брхс // толкаюи1его уеилия иередвижеиия оеун1е етвляетея штан1ами 33.
Подъем рабочих оргаиов машины в транспортное положепие оеуп1,ествляетея поередством спловых ци.1И11дров 26 и 16.
П р е д м е т. и з о б р е т е п и я
1. Машина для возведения цементно-бетонного нокрытия преимун;ественпо типа автотрека д.1я испытательного полнгопа, вк.чючающа самоходную ралп, ходовые тележки, привод, расиределитель бетона н гл бппн)1е внбраторы, отличающаяся тем, что, е целью образования криволинейного в нлане нокрытия е криволинейным нонеречпым профилем, она выполнена с радюй в виде п;арнирпого пара.чл ел огр а м м а, п р оти во иол ож 11 ы м и элем епта .м и
которого Я1 :1яются ходовые тележки, приче.м к одному нз длинных элементов этого параллелограмма посредством щар1п-1рно укрепленных балок прикреплен гибкий брус с координатным устройством, с которым взаимодействует
привод распределителя бетона. емо1Г1ированный с возможностью вертикального перемеп1е1П-1Я на подвижной каретке.
2. .Машииа ио п. 1, отличающаяся те.м, что коордииатпое лстройство 1ибкого бруса выиолиено е силовыми цилиндрамн- штоки которых шариирно нрикренлены к брусу, а полости силовых цилиндров связаны с полостямп золотнпковых цплнпдров, 30,:ioTHinui которых взаимодействуют с профильиыми кулачковыми валами и включеииыми в рычажную систему следящ.ими летройствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1990 |
|
RU2032294C1 |
| Бетоноукладчик | 1972 |
|
SU482531A1 |
| Бетоноукладчик | 1990 |
|
SU1791138A1 |
| Монорельсовая транспортная система | 1984 |
|
SU1311972A1 |
| Устройство для обработки корпуса судна в доке | 1983 |
|
SU1085892A1 |
| ТРАМВАЙНЫЙ ВАГОН С ПОНИЖЕННЫМ УРОВНЕМ ПОЛА | 2005 |
|
RU2302956C1 |
| БЕТОНОУКЛАДЧИК1:гС.ОЮЭИДЯ;;7:;о-тскш'шсш | 1972 |
|
SU332157A1 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО И ПРЕДНАЗНАЧЕННАЯ ДЛЯ НЕГО ПРИВОДНАЯ СИСТЕМА ДЛЯ МНОГОПОЗИЦИОННЫХ ПРЕССОВ С АВТОМАТИЧЕСКОЙ ПЕРЕДАЧЕЙ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1988 |
|
RU2020073C1 |
| Установка для сборки элементов ходовой части гусеничного транспортного средства | 1982 |
|
SU1025571A1 |
4 JZ 6
