Изобретение относится к обндему машиностроению и может быть .использовано в приводах многих маш.ин и механизмов, особенно в высокоростных, где требуется передача крутящего момента только в одном направлении.
Известен эксцент|риковый механизм свободного хода, содержащий ведущий двусторонний эксцентрик, ведомую цилиндрическую обойму, взаимодействующие с установленными между ними заклинивающими эксцентриковыми втулками, и :подп руж,иненные тормозные ролики.
Цель изобретения - использование механизма в системах высокоскоростных приводов, снижение потерь на трение и обеспечение самоустановки заклинивающих В1улок, повыщение надежности торможения этих втулок и повышение технологичности изготовления и монтажа.
Это достигается тем, что обраще«ные друг к другу рабочие поверхности ведущего эксцентрИка и заклинивающих элементов выполнены вогнуто-сферическими, и между ними установлены бочкообразные ролики. При этом тормозные ролики располол ены в клиновом пространстве, образованном между поверхностью обоймы и пазами эксцентриковых втулок, выполненных с торцовым лазом, выходящим на сферическую поверхность и образующим окно для установки бочкообразных роликов, и со вставками, соответствующими конфигурации
лаза, жестко закрепленными на втулке, например, винтами.
На чертеже показан описываемый механизм.
Эксцент1риковый механизм свободного хода содержит двусторонний эксцентрик / с буртом в середине, на периферии которого выполнены пазы для фиксаторов, цилиндрическую ведомую обойму 2, две эксцентриковых заклинивающих втулки 3, бочкообразные ролики 4, фиксаторы 5, закрепленные параллельно оси в заклинивающих втулках, тормозные роликл 6, поджи.маемые к обойме толкателями 7 и пружинами 8, вставки 9, винты 10 и опориые шайбы //. При этом беговые Д01рожки для бочкообразных роликов образованы выполнением обращенных друг к другу рабочих поверхностей эксцентриков и втулок сферическивогнутыми.
При повороте ведущего двустО|роннего эксцентри.ка / относительно обоймы 2 он одновременно пово рачивается в эксцентриковых заклинивающих втулках 3 и бочкообразных роликах 4 на некоторый угол, с.мещает и прижимает втулки к двум противопололсньтм поверхностям обоймы 2. Происходит заклинивание. Тормозные ролики 6, прижатые че|рез толкатель 7 пружина.ми 8 к поверхности обоймы 2, удерживают заклинивающие эксцентриковые втулки 3 от совместного поворота с эксцентриком /, что обеспеч-ивает надежное заклинивание механизма. Контакт заклинивающих эксцентриковых втулок с и обоймы 2 происходит по некоторой поверхности за счет небо.илиой их разницы в диамет|ре. Если обороты обоймы 2 увеличатся, то обойма повернет заклинивающие эксцентриковые втулки 3 на роликах 4 относительно двустороннего эк;сцентрика до тех иор, пока фиксаторы 5 не дойдут в лазах до упора. Произойдет размыкание обоймы 2 и заклинивающих втулок 3. Обойма свободно обгоняет закли}П1вающие зкоцентриковые втулки. Тормозные рол,ики 6 нри свободном ходе будут уде|ржи1вать втулки 3 симметрично оси, прижимая их фиксаторами 5 к упорам буртика двустороннего эксценприка 1. Наличие бочкообразных роликов 4 повышает чувствительность механ.изма и самоустановку рабочих элемедтов. Бочкообразные ролики устанавливаются цри снятых фИКсаторах 5, вставках 9 и винтах за фиксатора. При этом ведущи.ч элементом может быть 10 и -повернутой заклинивающей втулке до падвуст1;)ронний эксцентрик и обойма. Предмет изо б р е т е и и я 1. Эксцентриковый механизм с-вэбг)дпог() хода, содержаи1ИЙ двусторонний эксцентрик и едомую цилиндрическзю обойму, взаимодействующие с установленными между ни.ми заКоТинивающими эксцент1р.иковы: 1и втулками, и подпружиненные тормозные ролики, отличаю1цийся тем, что, с целью использования его з системах высокоскоростных приводов, снижения потерь иа трение и обеспече1 ия самоустановки заклинивающих втулок, обращенные одна к другой рабочие поверхности ведущего эксцентрика и заклинивающих элементов выполнены вогнуто-сферическими, и между ними установлены бочкообразные .ролики. 2. Механизм но и. 1, отличающийся тем, что, с целью повыщения надежности торможения заклинивающих втулок, тормозные ролики расположены в клиновом пространстве, образованном между поверхностью обоймы и паза п эксцентриковых втулок. 3. Механизм по пп. 1 и 2, отличающийся тем, что, с целью повышения технологичности изготовления и монтажа, эксцентриковые втулки выполнены с тс)рцовым пазом, выходящим на рабочую сферическую поверхность и образующим окно для установки бочкообразны ч роликов, и со вставками, соответствующи.ми конфигурации паза, жестко закрепленными на втулке, например, винтами.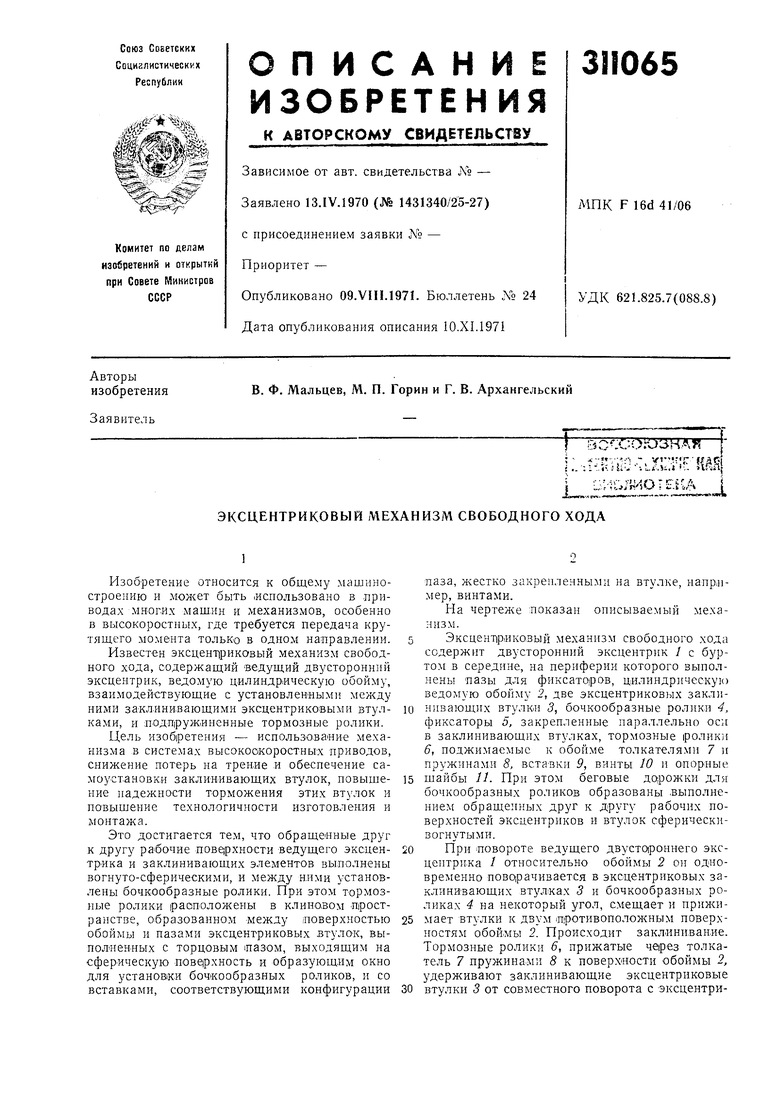
А -А
