Изобретение относится к грузозахватным устройствам, предназначенным преимущественно для перегрузки строительных конструкп ий, снабженных монтажными петлями.
Известно грузозахватное устройство для изделий, снабженных монтажными петлями, содержащее траверсу, шарнирно прикрепленные к ней консоли с поперечинами, на которых установлены штыревые захватные органы, и механизм фиксации их положения, установленный на траверсе и соединенный с захватными органами посредством тросо-блочной системы Cl 3.
Однако данное устройство имеет сложную конструкцию и может быть использовано только для изделий с постоянным расположением петель.
Наиболее близким к изобретению является захватное устройство для изделий с петлямн, содердащее несущую траверсу, закрепленные по ее концам блоки, огибаемые бесконечным канатом, и установленные на траверсе и прикрепленные к ветвям бесконечного каната каретки с захватными органами в виде крюков {.21,
Недостатком известного устройства является необходимость вьшолнения большого числа ручных операций при застропке и отстройке .груза.
Цель изобретения - повышение производительности работы путем обеспечения дистанционного управления захватными органами.
Поставленная цель достигается тем, что захватное устройство для изделий с петлями, содержащее несущую . траверсу, закрепленные по ее концам блоки, огибаемые бесконечным канатом и установленные на траверсе и прикрепленные к ветвям бесконечного каната каретки с захватными органами в виде крюков, снабжено закрепленным на каждой каретке с возможностью поворота подпружиненньш рычагом с фигурным отверстием вдоль его оси поворота и шарнирно прикрепленной к нему тягой, другой конец которой соединен с крюком, валом, установленным в фигурных отверстиях рычагов, и замком для фиксирования положения вала относительно одной из кареток.
.При этом замок может содержать стержень с рукояткой и закрепленные .на нем пальцы,. причем вал выполнен . с осевым отверстием и пазами под
пальцы, а один из рычагов - с выемкой.
Кроме того, каждый захватньй орган может быть снабжен горизонтально ус5 тановленной вилкой для ориентации его относительно петли изделия.
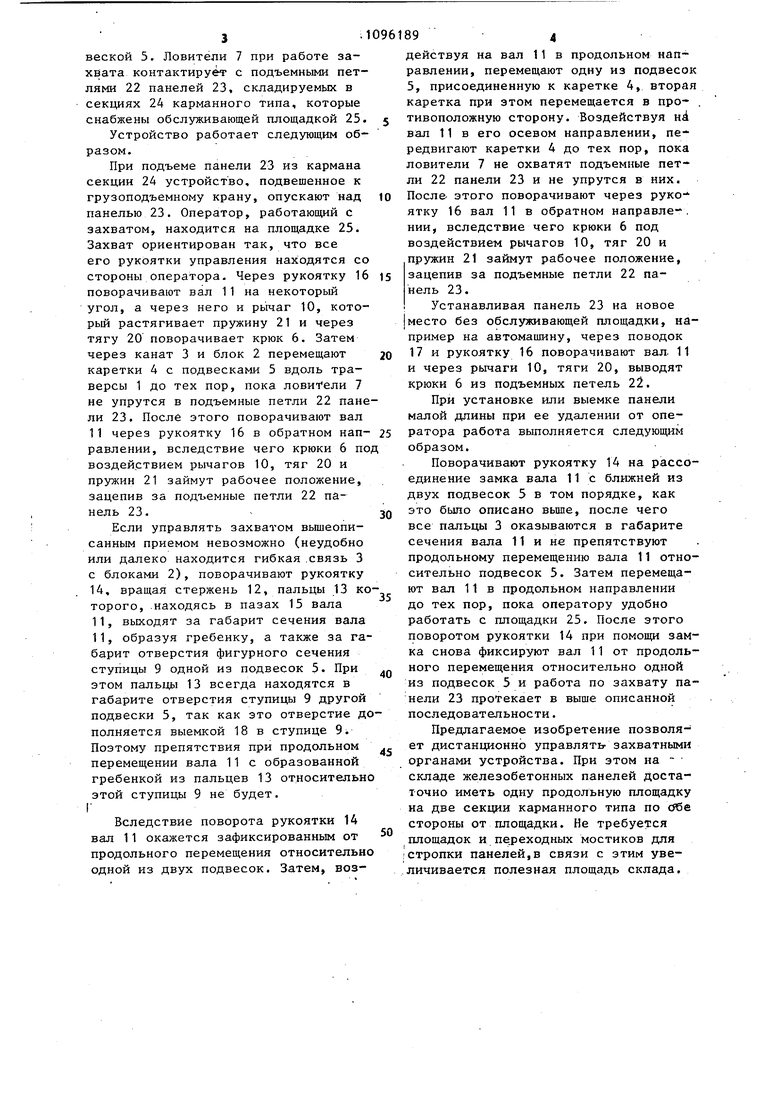
На фиг.1 изображено предлагаемое устройство; на фиг.2 - разрез А-А на фиг.1 на фиг.З - вид Б на фиг.1,
на фиг.4 - разрез В-В на фиг.2; на фиг.З - разрез Г-Г на фиг.2-, на фиг.6 - разрез Д-Д на фиг.5-, на фиг.7разрез Е-Е на фиг.1.
Устройство состоит из траверсы 1,
5 по концам которой закреплены блоки 2, охватываемые бесконечным канатом 3, На траверсе 1 смонтированы две каретки 4, прикрепленные к ветвям каната 3 (одна - к верхней, другая - к ниж0 ней). К кареткам 4 жестко прикреплены подвески 5, к каждой из которых снизу шарнирно прикреплен захватный крюк 6, и жестко - ловитель в виде вилки 7. В верхней своей части каждая
подвеска 5 снабжена втулкой 8, в ко.торую вставлен ступицей 9 рычаг 10 с возможностью его поворота на некоторый угол. Ступица 9 имеет отверстие фигурного сечения, например че0 тырехугольного, в которое вставлен вал 11 этого же сечения с возможностью его продольного перемещения.Вал 11 снабжен замком для фиксирования его от продольного перемещения отно5 сительно одной из подвесок 5, при
этом действие замка на вторую из подвесок 5 не распространяется. Один из вариантов замка показан на фиг.1. Он состоит из стержня 12, снабженного
0 рядом пальцев 13 и оканчивающегося рукояткой 14.,
Стержень 12 вставлен в осевое отверстие вала 11, который дополнительно снабжен пазами 15 для прохода
5 пальцев 13. Пазы 15 ограничивают угол поворота стержня 12. Расстояние между пальцами 13 вьшолнено больше ширины ступицы 9 для охвата последней при повороте стержня 12. Вал 11 на конце
0 снабжен рукояткой 16, к которой прикреплен поводок 17 для дистанционного поворота рукоятки 16. Ступица 9 одной из двух подвесок 5 снабжена выемкой 18 для того, чтобы сквозь нее прохо5 дили пальцы 13 при продольном перемещении вала 11. Каждый крюк 6 снабжен проушиной 19, через которую он соединен тягой 20 с рычагом 10. Пруяаша 21 растяжения соединяет рычаг 10 с подвеской 5. Ловители 7 при работе захвата контактирует с подъемными петлями 22 панелей 23, складируемых в секциях 24 карманного типа, которые снабжены обслуживающей площадкой 25. Устройство работает следующим образом. При подъеме панели 23 из кармана секции 24 устройство, подвешенное к грузоподъемному крану, опускают над панелью 23. Оператор, работающий с захватом, находится на площадке 25. Захват ориентирован так, что все его рукоятки управления нах;одятся со стороны оператора. Через рукоятку 16 поворачивают вал 11 на некоторый угол, а через него и рычаг 10, который растягивает пружину 21 и через тягу 20 поворачивает крюк 6. Затем через канат 3 и блок 2 перемещают каретки 4 с подвесками 5 вдоль траверсы 1 до тех пор, пока ловители 7 не упрутся в подъемные петли 22 пане ли 23. После этого поворачивают вал 11 через рукоятку 16 в обратном направлении, вследствие чего крюки 6 по воздействием рычагов 10, тяг 20 и пружин 21 займут рабочее положение, зацепив за подъемные петли 22 панель 23. Если управлять захватом вьпиеописанным приемом невозможно (неудобно или далеко находится гибкая .связь 3 с блоками 2), поворачивают рукоятку 14, вращая стержень 12, пальцы 13 ко торого, находясь в пазах 15 вала 11, выходят за габарит сечения вала 11, образуя гребенку, а также за габарит отверстия фигурного сечения ступицы 9 одной из подвесок 5. При этом пальцы 13 всегда находятся в габарите отверстия ступицы 9 другой подвески 5, так как это отверстие до полняется выемкой 18 в ступице 9. Поэтому препятствия при продольном перемещении вала 11 с образованной гребенкой из пальцев 13 относительно этой ступицы 9 не будет. |Вследствие поворота рукоятки 14 вал 11 окажется зафиксированным от продольного перемещения относительно одной из двух подвесок. Затем, возИ894 действуя на вал 11 в продольном направлении, перемещают одну из подвесок 5, присоединенную к каретке 4, вторая каретка при этом перемещается в противоположную сторону. Воздействуя ai вал 11 в его осевом направлении, передвигают каретки 4 до тех пор, пока ловители 7 не охватят подъемные петли 22 панели 23 и не упрутся в них. После- этого поворачивают через руко- ятку 16 вал 11 в обратном направле-. НИИ, вследствие чего крюки 6 под воздействием рычагов 10, тяг 20 и пружин 21 займут рабочее положение, зацепив за подъемные петли 22 панель 23. Устанавливая панель 23 на новое место без обслуживающей площадки, например на автомашину, через поводок 17 и рукоятку 16 поворачивают вал. 11 и через рычаги 10, тяги 20, выводят крюки 6 из подъемных петель 22. При установке или выемке панели малой длины при ее удалении от оператора работа выполняется следующим образом. Поворачивают рукоятку 14 на рассоединение замка вала 11с ближней из двух подвесок 5 в том порядке, как это бьшо описано выше, после чего все пальцы 3 оказываются в габарите сечения вала 11 и не препятствуют продольному перемещению вала 11 относительно подвесок 5. Затем перемещают вал 11 в продольном направлении до тех пор, пока оператору удобно работать с площадки 25. После этого поворотом рукоятки 14 при помощи замка снова фиксируют вал 11 от продольного перемещения относительно одной из подвесок 5 и работа по захвату панели 23 протекает в выше описанной последовательности. Предлагаемое изобретение позволяет дистанционно управлять- захватными органами устройства. При этом на складе железобетонных панелей достаточно иметь одну продольную площадку на две секции карманного типа по сРбе стороны от площадки. Не требуется площадок и пе.реходных мостиков для стройки панелей,в Связи с этим увеличивается полезная площадь склада.
Фиг.1
Bvd6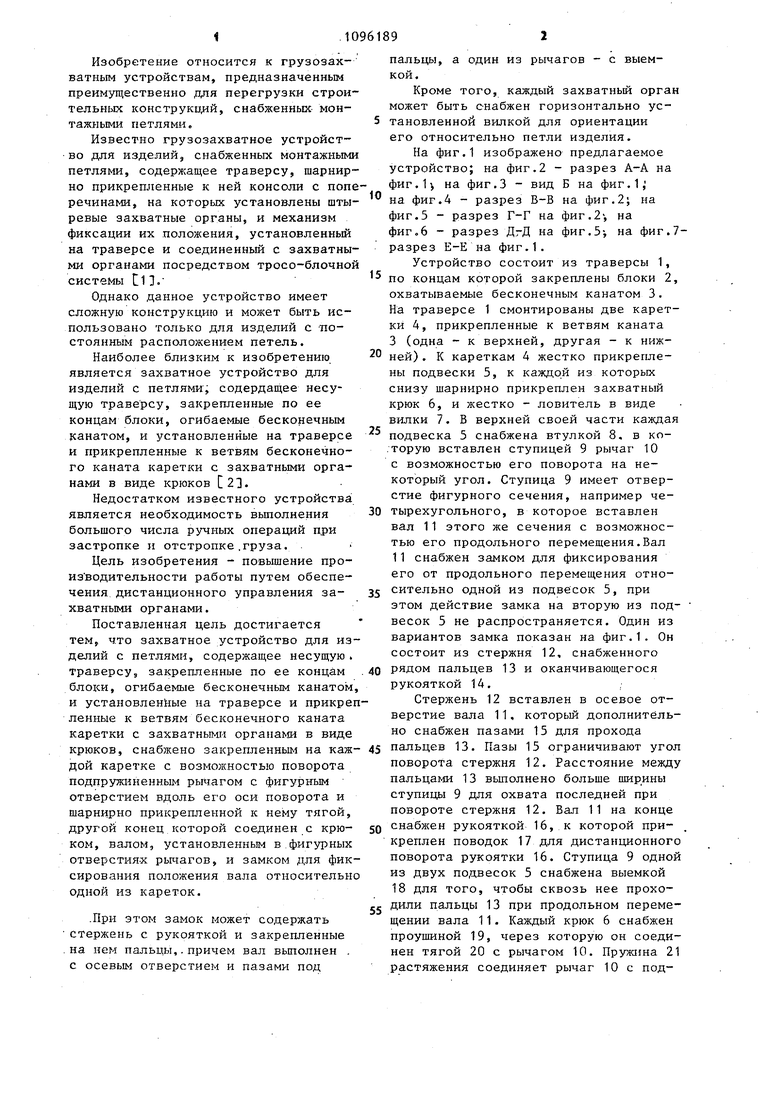
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАБОТЫ НА ВЫСОТЕ | 1992 |
|
RU2018601C1 |
| Автоматическая линия для химической обработки деталей | 1974 |
|
SU653199A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ БОЛЬШОГО ДИАМЕТРА | 2003 |
|
RU2245292C2 |
| Грузозахватная траверса | 1978 |
|
SU765186A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| ТРАВЕРСА | 2016 |
|
RU2610770C1 |
| Устройство для подачи объектов на сооружение | 1979 |
|
SU856969A1 |
| Устройство для кантования изделий | 1988 |
|
SU1675186A1 |
| Траверса для подъема и перемещения крупногабаритных тяжеловесных грузов | 1978 |
|
SU767006A1 |
| Устройство для захвата и транспортировки контейнеров по подвесной дороге | 1973 |
|
SU553189A1 |

1. ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ИЗДЕЛИЙ С ПЕТЛЯМИ, содержащее несущую траверсу, закрепленные по ее концам блоки, огибаемые бесконечным канатом, и установленные на траверсе и прикрепленные к ветвям бесконечного каната каретки с захватными органами в виде крюков, отличающ е е с я .тем, что, с целью повышения производительности работы путем обеспечения дистанционного управления захватными органами, оно снабжено закрепленным на каждой каретке с возможностью поворота подпружиненным рычагом с фигурным отверстием вдоль его оси поворота и шарнирно прикрепленной к нему тягой, другой конец которой соединен с крюком, валом, . установленным в фигурных отверстиях рычагов, и замком для фиксирования положения вала относительно одной из кареток, 2.Захватное устройство по п.1, отличающееся тем, что указанный замок содержит стержень с рукояткой и закрепленные на нем § пальцы, причем вал выполнен с осевым отверстием и пазами под пальцы, a О) один из рычагов - с выемкой. 3.Захватное устройство по пп.1 и с 2, отличающееся тем, что каждый захватный орган снабжен горизонтально установленной вилкой для ориентации его относительно петли изделия. со Ф 00 со
фуг. 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Грузозахватное устройство | 1978 |
|
SU664906A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Козлов Ю.Т., Обермейстер A.M., Протасов Л.П | |||
| и др | |||
| Грузозахватные устройства | |||
| Справочник, М., Транспорт, 1980, с | |||
| Кран машиниста для автоматических тормозов с сжатым воздухом | 1921 |
|
SU194A1 |
| Устройство непрерывного автоматического тормоза с сжатым воздухом | 1921 |
|
SU191A1 |
