Изобретение относится к гидромеханическим приводам летательных анларатов.
В основном авт. св. № 295709 онисан исполнительный механизм рулевого привода, содержащ.ий неподвижный цилиндр с поршнем и штоком, снабженным ЯОДБИЖЙОЙ крышкой и соединенным с шатуном посредством вилки с резьбовым хвостовиком, опирающ.ейся при по.мош,и гайки на кольцевой бурт, образуюш,ийюя .внутри штока. Однако эти механизмы невозможно использовать в электрогидравлических рулевых машинах с электрической обратной связью, вынолненной в .в-иде .потенциометров, с помош,ью которых мехаНическое атеремеш;ен.ие выходного штока преобразуется в электрический сигнал обратной связи.
Предлагаемый механизм является усовершенствованным iiio сравнению с известным из основного авт. св. К° 295709 и отличается тем, что в нем на резьбовой части хвостовика вилки неподвижно закреплен поводок, со сферическим наконечником, взаимодействующим с движком потенциометра. Это позволяет применять его в рулевых агрегатах с имеющей потенциометр электрической обратной связью.
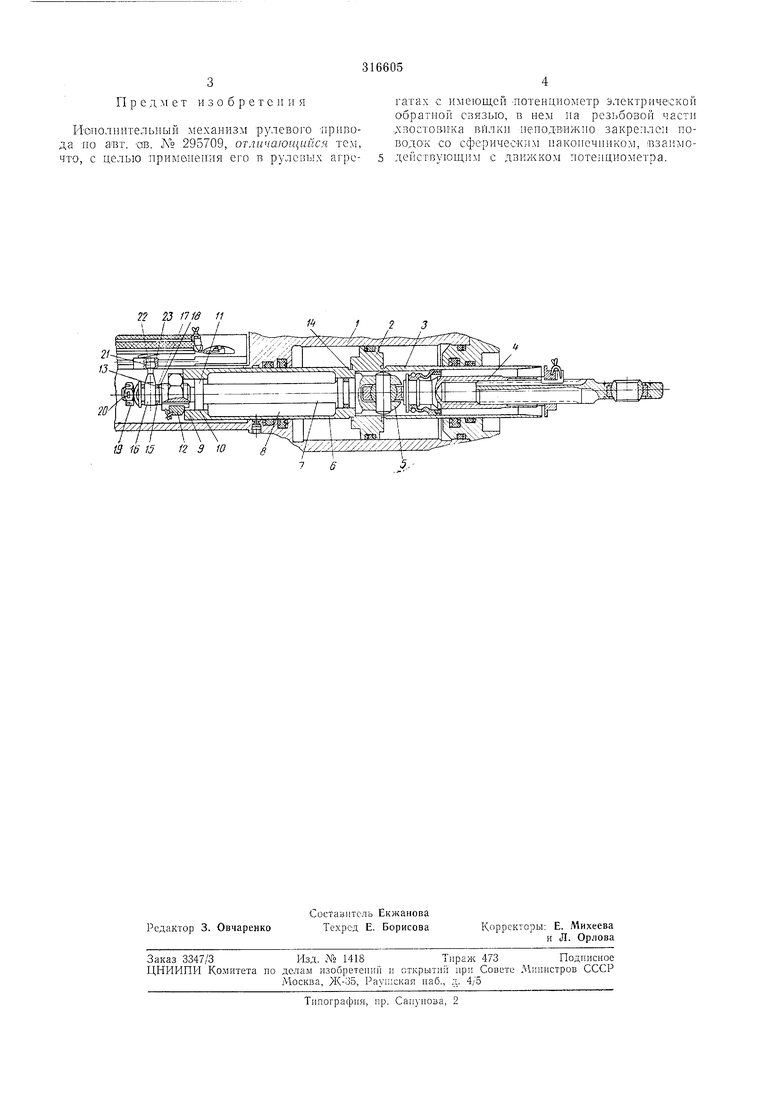
На чертеже изображен предлагаемый исполнительный .механизм.
ленным с помощью вилки о в расточ1ке штока 6. Хвостовик 7 вилки 5 вынесен через расточку 8 за наружный торец 9 штока 6. Шток 6 имеет направляющую расточ1ку 10, в :которой
центрируется направляющий бурт // хвостовика 7. На иаружный торец 9 штока 6 опирается гайка 12, навернутая на резьбу 13 хво.стовпка 7 и затянутая так, что вилка 5 хвостовика 7 упирается во впутренний бурт 14
поршня 2. При этом шток 6 натружается сжатием.
Хвостовик 7 имеет цилиндрическую часть
15,служащую для монтажа на ней поводка
16,упирающегося через набор шайб 17 в бурт 18 при затяжке гайки 19, навернутой на резьбовой конец 20 хвостовика 7. Поводок 16, упирающийся в бурт 18 хвостовика 7, имеет сферическую поверхность 21, которая входит в сверление 22, выполненное в движ.ке 23 потепциометра обратной связн, закрепленного па цилиндре /.
При движении поршпя 2 со штоками 3 i 6 в цилиндре / перемещается и поводок 16, закрепленный па хвостовике 7 внл.ки 5, жестко связанной с поршне.м 2. При этом смещается и двпл-сок 23, имеющий безлюфтовое соединение с поводком 16 через сферическую поверхиость 21, изменяя своим перемещением сопроПредмет изобретения Исполнительный механизм рулевого привода ио аът. ав. 295709, отличаюгцийся тем, что, е целью ирименеп.ия его в рулепых агре- 5 гатах с имеющей Потенциометр электрической обратиой связью, в нем на резьбовой части .ХвостовИКа вилки неподвижно закреплен поводо к со сс})еричес-кнл1 иакоиечником, взаимодействующим с движком потепциометоа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2011 |
|
RU2500576C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО НРИВОДА | 1971 |
|
SU295709A1 |
| РУЧНОЙ МЕХАНИЧЕСКИЙ ПРИВОД ГЛАВНОГО ТОРМОЗНОГО | 1972 |
|
SU359176A1 |
| Прихват | 1982 |
|
SU1134344A2 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| Вакуумный захват (его варианты) | 1984 |
|
SU1201214A1 |
| Стенд для испытания зубчатых колес при динамических нагрузках | 1990 |
|
SU1711014A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| Переносной токарный станок для обработки концов труб | 1989 |
|
SU1710193A1 |
22 2J П1д I 1/
/ ...., 1. .,{.,.,. ) щт ||№;у-11 / / / . . . , Jb,
/6- /J 12 9 Ю/ // ://// ///A ////Z2::f
7 В5.. И I
