Изобретение относится к области техники автоматического управления, к классу самонастраивающихся систем.
Известны способы самонастройки систем, основанные на минимизации суммарной среднеквадратической ошибки посредством анализа результатов пробных движений в системе.
Недостатком известного способа самонастройки является его малое быстродействие.
Предложенный способ отличается тем, что минимизируют разностное среднеквадратическое значение динамической и флюктуационной ошибок при среднеквадратической суммарной ошибке, большей заданного порогового значения, прекращают процесс минимизации на время переходных процессов при достижении суммарной среднеквадратической ошибки заданного порогового значения и при движении к минимуму, а затем минимизируют сум,марную среднеквадратическую ошибку, причем разностное среднеквадратическое значение динамической и флюктуационной ошибок минимизируют при достижении суммарной ошибкой порогового значения и при движении от минимума.
Предложенный способ самонастройки увеличивает быстродействие самонастраивающихся систем автоматического управления.
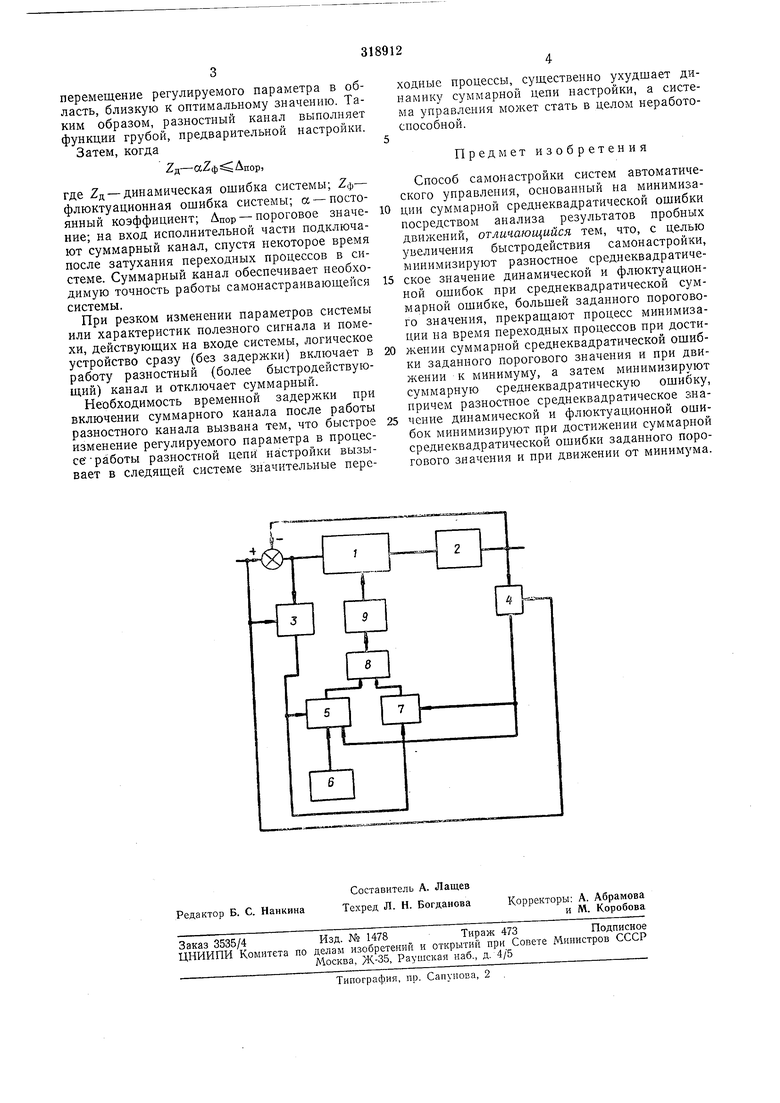
На чертелсе приняты следующие обозначения:
/ - управляющая часть основной следящей системы, параметры которой регулируются оптимальным образом автоматически; 2-объект управления; 3 - измеритель динамической ошибки; 4 - измеритель флюктуационной ошибки; 5 - канал цепи настройки по суммарному значению ошибки; 6 - датчик пробных сигналов и синхронизатор; 7 - канал цепи настройки по разностному значению динамической и флюктуационной ошибок; 8 - логическое устройство цепи настройки; 9 - исполнительная часть цепи настройки.
Сигналы с выходов измерителей динамической 3 и флюктуационной 4 ошибок системы одновременно подаются на оба канала цепи настройки.
С выходов суммарного и разностного каналов сигналы подаются на логическое устройство цепи настройки, которое, в зависимости от величины рассогласования истинного значения регулируемого параметра от его оптимального значения, подключает на вход исполнительной части цепи настройки либо разностной, либо суммарный канал.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА | 1969 |
|
SU253895A1 |
| ЛИЙ | 1973 |
|
SU379889A1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ, СОСТОЯЩАЯ ИЗ ГОЛОВКИ СОВМЕЩЕНИЯ ИЗОБРАЖЕНИЙ И САМОНАСТРАИВАЮЩЕГОСЯ АВТОПИЛОТА | 1960 |
|
SU1840806A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2304298C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| РЕЛЕЙНОЕ САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО | 1969 |
|
SU251045A1 |
