1
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях для надежного и точного сопровождения целей по дальности.
В настоящее время в РЛС точного сопровождения целей по дальности широко используются электронные импульсные автодальномеры в виде следящих систем с астатизмом второго порядка.
Недостатком известных автодальномеров с постоянными параметрами является их неприспособленность к изменению входных воздействий; при широких диаиазонах изменения этих воздействий точность и помехоустойчивость могут значительно снижаться.
Целью изобретения является повышение точности и помехоустойчивости автодальномера в условиях широких диапазонов изменения входных воздействий и получение возможности надежной работы после изменения входных воздействий.
Это достигается перестройкой параметров автодальномера таким образом, чтобы при любых входных воздействиях его ошибка была минимальной.
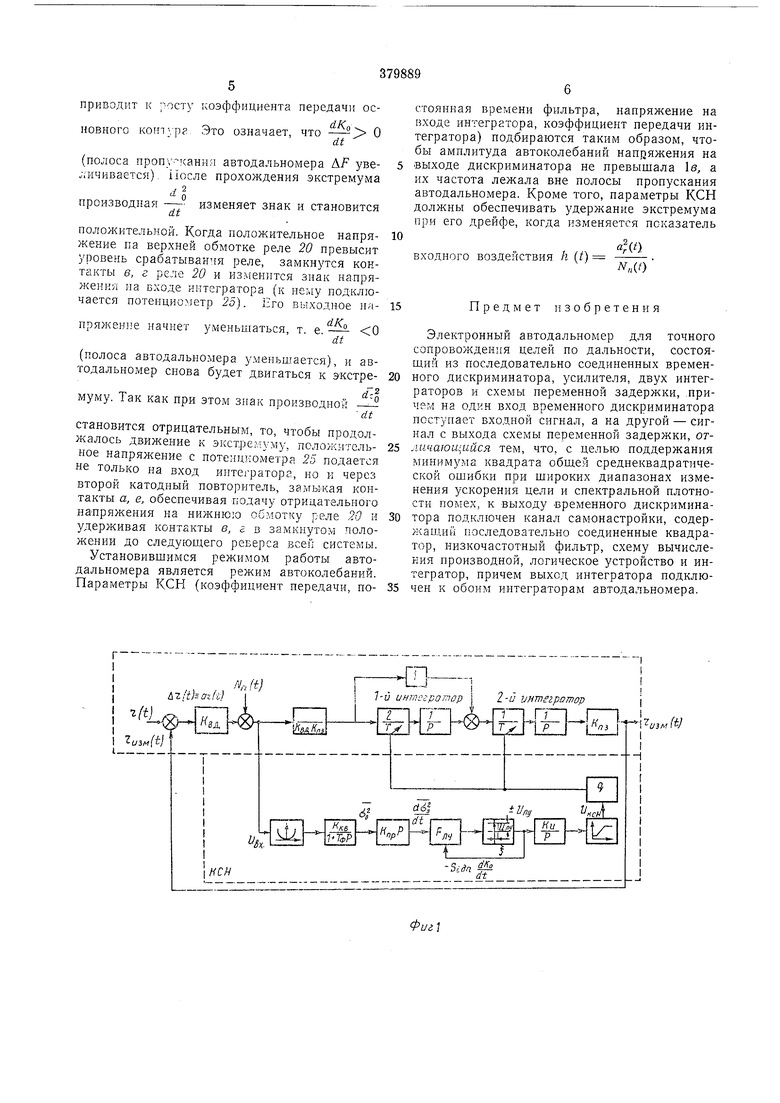
Экстремальная настройка параметров предложенного автодальномеоа обеспечивается за счет введения в него канала самонастройки параметров (КСН), состоящего из квадратора, сглаживающего фильтра, схемы вычисления производной среднеквадратической ошибки, логического устройства (ЛУ) и интегратора.
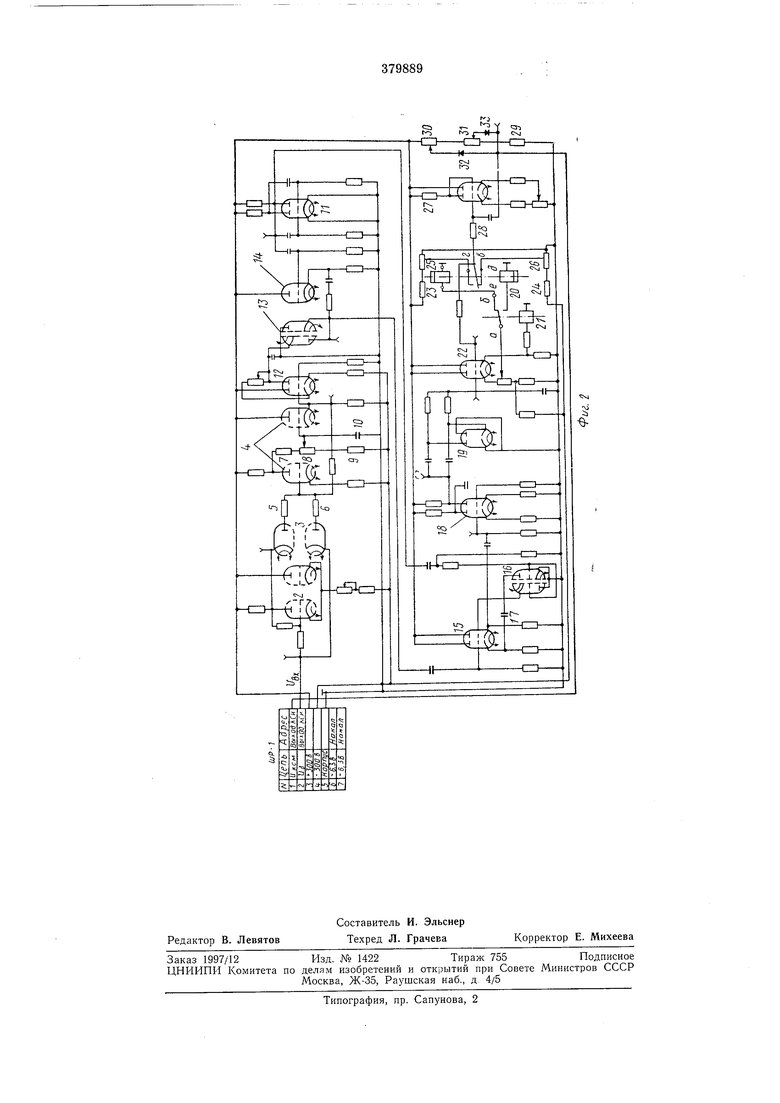
На фиг. 1 показана структурная схема самонастраивающегося автодальномера; на фиг. 2 - принципиальная схема КСН.
Квадратор КСН / собран по схеме модульного элемента на усилителях постоянного тока (лампы 2-4) с варисторами 5, 6 в цепях обратных связей (фиг. 2).
Применение варисторов позволяет получить компактную и простую схему квадратора. Так как f/Bx (фиг. 2) представляет собою выходное напряжение дискриминатора, т. е. смесь регулярной и шумовой составляющих, которые обе несут полезную информацию для КСН, то сглаживание напряжения /кв производится фильтром (7-10) с постоянной времени:
т
Ф - 1:
макс
где F-p макс - максимальная частота спектра регулярной составляющей напряжения дискриминатора.
В качестве схемы вычисления производной применена схема определения конечных разностей, которая позволяет находить усредненное значение, что повышает надежность работы схемы при наличии случайных флюктуации напряжения на выходе квадратора.
Схема содержит генератор тактовых импульсов (несимметричный мультивибратор на лампе 11), амплитудно-импульсный модулятор (диодный ограничитель на лампах 12- 14), схему выделения первых разностей 15- 17, двухкаскадный видеоусилитель (ВУС) на лампе 18 и двунаправленный детектор 19.
Логическое устройство предназначено для переключения положительного и отрицательного напряжения на входе интегратора КСН таким образом, чтобы в автодальномере осуществлялся непрерывный поиск минимума квадрата общей среднеквадратической ошибки (СКО) Од, или соблюдались условия его статической устойчивости:
d-l
0 и
О При
0;
dKo
dt
d
-- -- 0 при
0 и
0; dt
dKo
-1/
где Ко
V N1
иг (t) - радиальное ускорение цели; (О - спектральная плотность помех.
Логическое устройство состоит из поляризованного реле 20, реле 21, двух катодных повторителей на лампе 22 и двух делителей напряжения на резисторах 23, 24 и потенциометрах 25, 26, являющихся источниками входных напряжений интегратора, уровень которых может регулироваться с помощью потенциометров.
Интегратор вырабатывает линейно изменяющееся управляющее напряжение постоянного тока, которое поступает на усилители автодальномера с перестраиваемыми коэффициентами усиления. Интегратор собран по схеме однокаскадного УПТ на лампе 27 с отрицательной обратной связью через конденсатор 28. На выходе интегратора поставлен ограничитель сверху и снизу на резисторе 29, потенциометрах 30, 31 для регулирования уровней ограничения и диодах 32 и 33. Ограничитель обеспечивает перестройку /Со (полосы А/) автодальномера в требуемых пределах.
Электронный автодальномер с КСН работает следующим образом.
В процессе сопровождения цели с изменением дальности непрерывно изменяется соотношение между динамической ощибкой, пропорциональной ускорению иг (t) и уровнем помех Nn (t). Это же соотношение изменяется также в зависимости от характера цели и помех. Напряжение с выхода дискриминатора (фиг. 1) в виде смесн регулярной и случайной составляющих, пропорциональных соответственно От (t) И Nn (t), поступает не только на вход исполнительного устройства основного
контура автодальномера для з-правления задержкой стробов сопровождения, но и на вход КСН для целей экстремального управления параметрами основного контура.
Квадратор с фильтром выполняет математическую операцию следующего вида;
,об77+
+ + 7с.О.
Так как управляющее воздействие а (t) и помехи Nn (i) некоррелированы между собой, то после усреднения член 2 UpUcn 0, поэтому
кв -- Акв (р + сл ,
где
, ,2 ,-,2 -2 7/2 -2 Up - А вд °л, и ел - БД °фл ;
2
- средние квадраты динамической и
°фл флюктуационной ошибок, в
a {/С.д -м
25 Таким образом, Uus KкsKl.йo , т. е. пропорционально среднему значению квадрата общей СКО автодальномера.
Схема вычисления производной определяет
величину и знак производной15. . В связи с
dt
тем, что логическое устройство построено на
принципе релейного управления работой интегратора, необходимо без ошибок определять
-2
только знак производной- , что и обеспечиdt
вает схема вычисления производной, ностроенная как схема определения конечных разностей амплитудно модулированной последовательности импульсов, величины амплитуд которых соответствуют значению ц в данный момент времени. Импульсная последовательность конечных разностей усиливается с помощью ВУС на лампе 18 и детектируется двунаправленным детектором на лампе 19.
Логическое устройство работает следующим образом.
Пусть в некоторый момент автодальномер работает на левой части одной из экстремальных характеристик, стремясь к экстремуму. При этом напряжение на выходе дискримннатора (на входе КСН) уменьшается и произ ;0. Отрицательное напряжение с
водная
dt
выхода первого катодного повторителя через контакты а, б реле 21 поступает на верхнюю обмотку поляризованного реле 20, при этом замкнуты контакты в, д реле 20 и отрицательное напряжение с потенциометра 26 «СКОР, ПОИСК поступает на интегратор, а его выходное напряжение УКОН увеличивается, что приводит к росту коэффициента передачи основного коит/р Это означает, что -- О (полоса пропу-кания автодальномера AF уве- 5 личивается). После прохождения экстремума производная изменяет знак и становится положительной. Когда положительное напря- 10 жение па верхней обмотке реле 20 превысит уровень срабатывания реле, замкнутся контакты в, г реле 20 и изменится знак напряжения на входе интегратора (к нему подключается потенциометр 25). Его выходное на- 15 пряженне начнет уменьшаться т е 0 (полоса автодальномера уменьшается), и автодальномер снова будет двигаться к экстре- 20 муму. Так как при этом знак производной становится отрицательным, то, чтобы продолжалось движение к экстре,чуму. положчтель- 25 ное напрял ение с нотеицио.метра 25 подается не только на вход интегратора, но и через второй катодный повторитель, замы1кая контакты а, е, обеспечивая подачу отрицательного напряжения на обмотку реле /.О и удерживая контакты е, г в замкнутом положении до следующего реверса всей системы. Установившимся режимом работы автодальномера является режим автоколебаний. Параметры КСН (коэффициент передачи, по- 35 стоянная времени фильтра, напряжение на входе интегратора, коэффициент передачи интегратора) подбираются таким образом, чтобы амплитуда автоколебаний напряжения на выходе дискриминатора не превышала в, а их частота лежала вне полосы пропускания автодальномера. Кроме того, параметры КСН должны обеспечивать удержание экстремума при его дрейфе, когда изменяется показатель входного воздействия h (/) Предмет изобретения Электронный автодальномер для точного сопровождения целей по дальности, состоящий из последовательно соединенных временного дискриминатора, усилителя, двух интеграторов и схемы переменной задержки, .причем на один вход временного дискриминатора поступает входной сигнал, а на другой - сигнал с выхода схемы переменной задержки, отличающийся тем, что, с целью поддержания минимума квадрата общей среднеквадратической ошибки при широких диапазонах изменения ускорения цели и спектральной плотности помех, к выходу временного дискриминатора подключен канал самонастройки, содержаш.ий последовательно соединенные квадратор, низкочастотный фильтр, схему вычисления производной, логическое устройство и интегратор, причем выход интегратора подключен к обоим интеграторам автодальномера.

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1978 |
|
SU744446A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| Пневматический регулятор | 1979 |
|
SU849140A1 |
| Анализатор спектра | 1978 |
|
SU748266A1 |
| АНАЛИЗАТОР СЛУЧАЙНЫХ ПРОЦЕССОВ | 1991 |
|
RU2012052C1 |
| ПРОПОРЦИОНАЛЬНЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1965 |
|
SU174249A1 |
| Система управления электроприводом | 1979 |
|
SU824135A1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| Аналого-цифровой преобразователь интегральных характеристик напряжений | 1988 |
|
SU1615888A1 |