Известны шпатовые манипуляторы, исполиительный механизм которых через трубчатые тяги посредством карданных механизмов связан с рукояткой управления.
Описываемый манипулятор отличается от известных тем, что па рукоятке управления установлен маховичок, жестко соединенный с трубчатой тягой, другой конец которой соединен с кистью исполнительного механизма посредством двойного пустотелого шарнира.
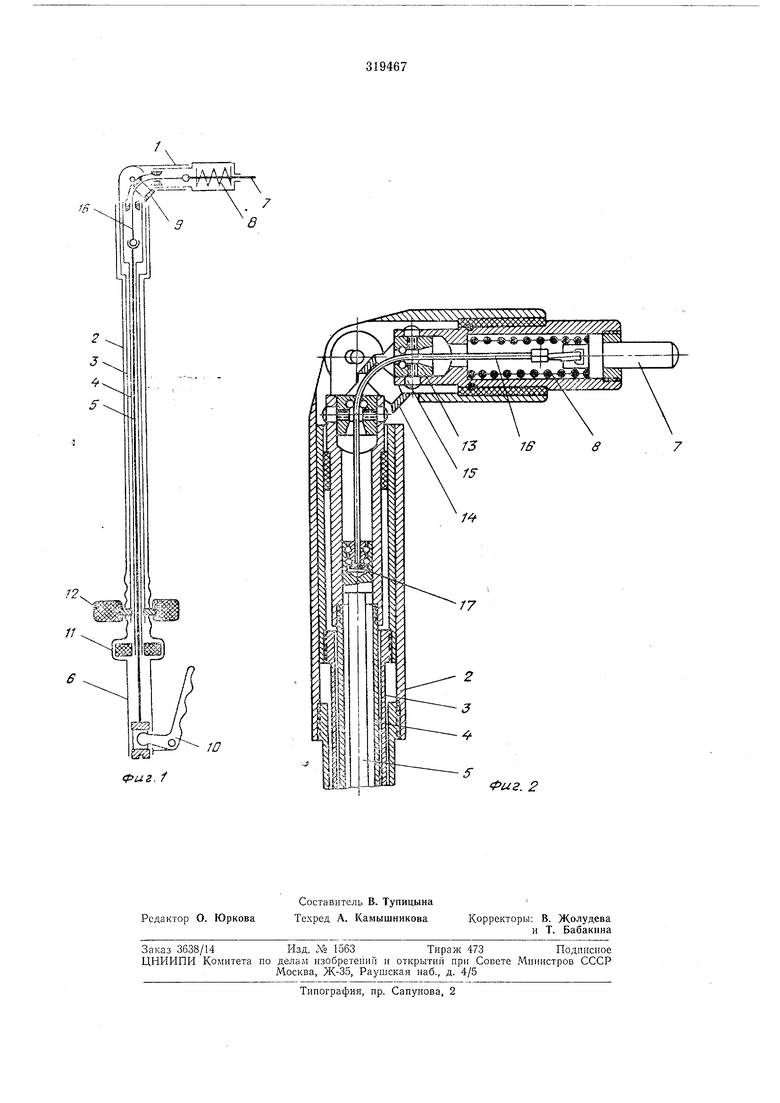
На фиг. 1 схематически изображен описываемый манипулятор; на фиг. 2 - кисть манипулятора в согнутом на 90° полонсении.
Манипулятор состоит из исполнительного органа -кисти 1, несущей трубы 2, передаюш,их органов - трубчатых тяг 3, 4, штока 5 и задаюш,его органа - рукоятки 6.
В кисти имеются палец 7, возвратная пружина 8 и полый двойной шарнир 9.
Элементами рукоятки являются рычаг 10 управления пальцем 7, маховичок 11 вращения кисти и маховичок 12 изгиба кисти.
Полый двойной шарнир представляет собой муфту, позволяющую -производить изгиб соединяемых органов в пределах телесного угла 90°.
Управление кистью манипулятора производится следующим образом. Для втягивания пальца 7 внутрь- кисти рычаг 10 прижимается к рукоятке и через шток 5 и тросик 16 перемещает палец, сжимая пружину 8.
Для изгиба кисти вращают маховичок 12,
и он, перемещаясь вдоль трубы 2, толкает
тягу 3, которая заставляет изгибаться кисть.
Вращение кисти осуществляется маховичком 12 через трубчатую тягу 4 и идарнир 9.
Для предотвращения окручивания тросика 16 при вращении кисти предусмотрен специальный щарнир 17, соединяющий шток 5 с тросиком.
15
Предмет изобретения
20
Манипулятор шпаговый, исполнительный механизм которого через трубчатые тяги связан с рукояткой управления, отличающийся тем, что, с целью упрощения конструкции, на рукоятке управления установлен маховичок, жестко соединенный с трубчатой тягой, другой конец которой соединен с кистью исполнительного механизма посредством пустотелого двойного шарнира.
л Л Л |L
.
15 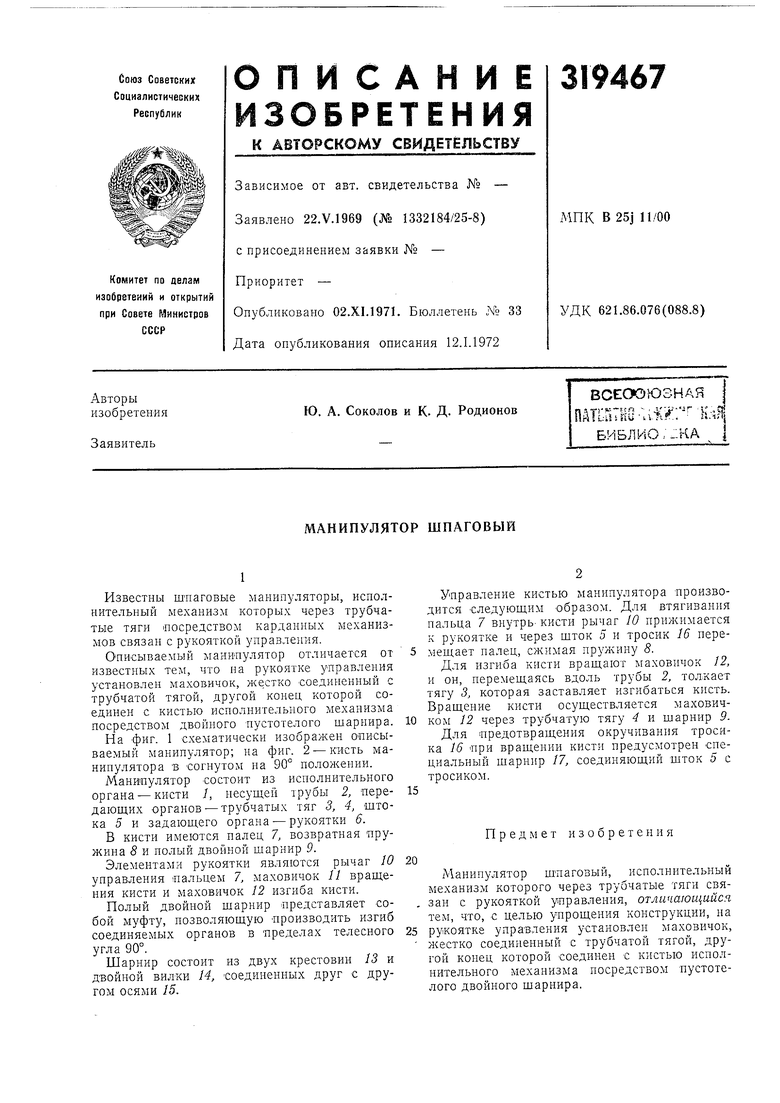
| название | год | авторы | номер документа |
|---|---|---|---|
| Орган ручного управления инвалидной коляской | 1990 |
|
SU1773792A1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 1966 |
|
SU177749A1 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| Шпаговый манипулятор | 2017 |
|
RU2663393C1 |
| ЭЛЕВАТОР ДЛЯ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 1996 |
|
RU2099503C1 |
| Опора для человека | 2022 |
|
RU2799671C1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
J4фиг. /
ff
Риг. 2
