Предлагаемый манипулятор шпатовый предназначен для выполнения различных операций по обслуживанию технологических процессов в радиационно-защитной камере.
Известен шпатовый манипулятор (см. описание изобретения к авторскому свидетельству РФ №177749, МПК B23d, опубл. 18.12.1965 г), включающий исполнительный механизм, рукоятку управления, пустотелую соединительную штангу, расположенную в шаровой опоре. Связь между исполнительным механизмом и рукояткой управления выполнена в виде расположенных внутри пустотелой штанги тяги и концентричных труб, соединяющих элементы рукоятки с соответствующими элементами исполнительного механизма при помощи карданных механизмов, расположенных один в другом.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного изобретения, относится то, что известное устройство сложное в изготовление, а карданные соединения плохо подвергаются настройке и регулировке.
Сущность предлагаемого устройства заключается в том, что рукоятка управления соединена с исполнительным механизмом посредством центрального тросика, кроме того рукоятка управления жестко соединена с шаром начальным, который посредством четырех периферийных тросиков и талреп-компенсаторов соединен с шаром конечным, который жестко через наконечник соединен с исполнительным механизмом, выполненным в виде сменного захвата. Кроме того, пустотелая соединительная штанга оснащена направляющей втулкой в которой укладываются периферийные тросики.
Использование предлагаемого изобретения обеспечивает следующий технический результат: упрощение конструкции с целью использования устройства в радиационно-защитной камере.
Указанный технический результат при осуществлении изобретения достигается тем, что шпатовый манипулятор содержит исполнительный механизм, рукоятку управления, пустотелую соединительную штангу, расположенную в шаровой опоре. Особенность заключается в том, что рукоятка управления соединена с исполнительным механизмом посредством центрального тросика, кроме того рукоятка управления жестко соединена с шаром начальным, который посредством четырех периферийных тросиков и талреп-компенсаторов соединен с шаром конечным, который жестко через наконечник соединен с исполнительным механизмом, выполненным в виде сменного захвата. Кроме того, пустотелая соединительная штанга оснащена направляющей втулкой в которой укладываются периферийные тросики.
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения.
Следовательно, заявленное изобретение соответствует условию «новизна».
Конструкция изобретения представлена на фигурах.
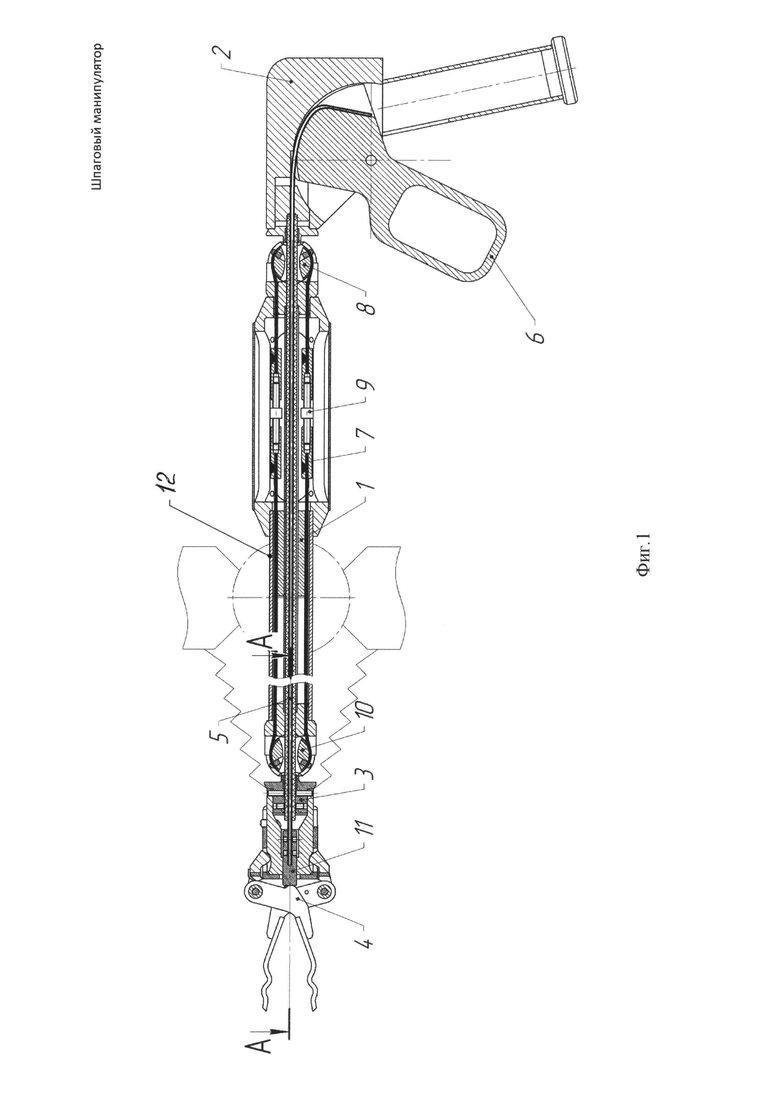
Фиг. 1 - Общий вид устройства.
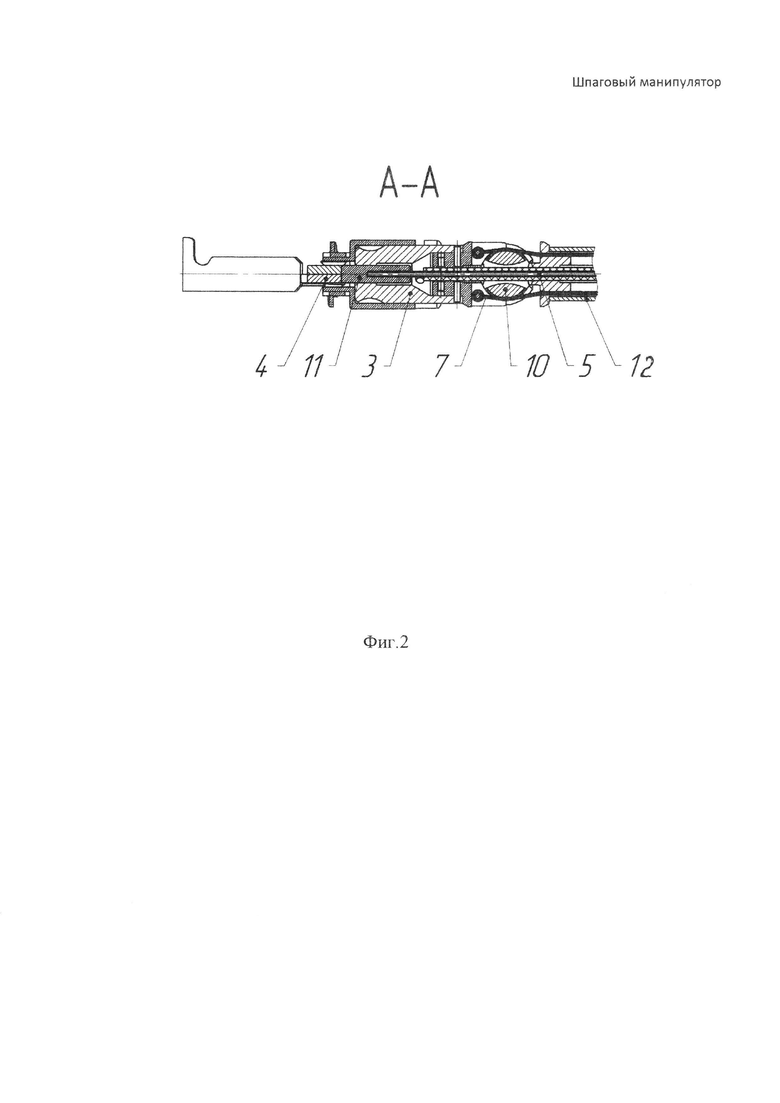
Фиг. 2 - Разрез А-А.
Устройство включает в себя направляющую втулку 1, рукоятку 2, наконечник 3, сменный захват 4, центральный тросик 5, нажимную скобу 6, периферийные тросики 7, начальный шар 8, талреп-компенсатор 9, конечный шар 10, шток 11, пустотелую соединительную штангу 12.
Устройство крепят в шаровой опоре на камере, а рукоятку управления в операторском помещении.
Устройство работает следующим образом. Оператор берет в ладонь рукоятку 2 и пальцами приводят в движение нажимную скобу 6. В этом случае происходит продольное перемещение жестко закрепленного на скобе 6 центрального тросика 5, который закреплен со штоком 11. При продольном перемещении шток 11 приводит в движение сменный захват 4, губки которого сжимаются или разжимаются.
Для углового перемещения сменного захвата 4 в плоскости чертежа оператор перемещает рукоятку 2 вверх (см. фиг. 1). В этом случае жестко связанный с ручкой 2 начальный шар 8 вращается вокруг оси перпендикулярной плоскости чертежа и перемещает закрепленные на шаре периферийные тросики 7. Последние вращают вокруг оси конечный шар 10, а тот в свою очередь через наконечник 3 перемещает сменный захват 4 в плоскости чертежа вниз.
Таким же образом оператор перемещает сменный захват 4 вверх, влево или вправо перемещает рукоятку 2 соответственно вниз, вправо или влево.
Круговое движение сменного захвата 4 осуществляется оператором путем кругового вращения рукоятки 2.
Осевое смешение сменного захвата 4 осуществляется оператором путем осевого смещения рукоятки 2.
Точность перемещения сменного захвата 4 осуществляется за счет регулировки талреп-компенсаторов 9 четырех периферийных тросиков 7.
Для предотвращения спутывания периферийных тросиков 7 пустотелая соединительная штанга 12 оснащена направляющей втулкой 1 в которой укладываются периферийные тросики 7.
Таким образом, выше изложенное описание свидетельствует о выполнении при использовании заявленного изобретения следующей совокупности условий:
- средство, воплощающее заявленное изобретение, при его осуществлении, предназначено для выполнения различных операций по обслуживанию технологических процессов в радиационно-защитной камере.;
- для заявленного устройства, в том виде как оно охарактеризовано в изложенной формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке средств и методов;
- средство, воплощающее заявленное изобретение при осуществлении, способно обеспечить достижение усматриваемого заявителем поставленных технических задач - упрощение конструкции с целью использование устройства в радиационно-защитной камере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| Манипулятор шпагового типа | 1960 |
|
SU137594A1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 1966 |
|
SU177749A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691177C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2718812C1 |
| ВСЕСЮЮЗНАЯ jПАШТНО • аЖ/^ КлЧ БИ&лио;.:кА j | 1971 |
|
SU319467A1 |
| Шпаговый манипулятор | 2018 |
|
RU2698114C2 |
Изобретение предназначено для выполнения различных операций по обслуживанию технологических процессов в радиационно-защитной камере. Манипулятор содержит исполнительный механизм, рукоятку управления, пустотелую соединительную штангу, расположенную в шаровой опоре. Рукоятка управления соединена с исполнительным механизмом посредством центрального тросика и жестко соединена с шаром начальным, который посредством четырех периферийных тросиков и талреп-компенсаторов соединен с шаром конечным. Шар конечный жестко через наконечник соединен с исполнительным механизмом, выполненным в виде сменного захвата. Пустотелая соединительная штанга оснащена направляющей втулкой, в которой уложены периферийные тросики. Изобретение обеспечивает упрощение конструкции. 1 з.п. ф-лы, 2 ил.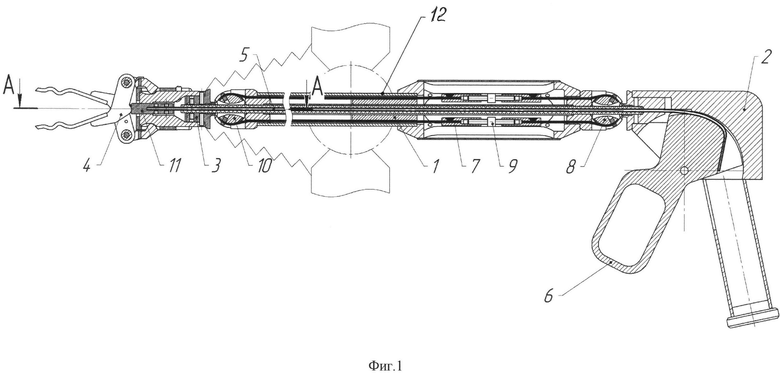
1. Шпаговый манипулятор, содержащий исполнительный механизм, рукоятку управления, пустотелую соединительную штангу, расположенную в шаровой опоре, отличающийся тем, что рукоятка управления соединена с исполнительным механизмом посредством центрального тросика и жестко соединена с шаром начальным, который посредством четырех периферийных тросиков и талреп-компенсаторов соединен с шаром конечным, который жестко через наконечник соединен с исполнительным механизмом, выполненным в виде сменного захвата.
2. Шпаговый манипулятор по п. 1, отличающийся тем, что пустотелая соединительная штанга оснащена направляющей втулкой, в которой уложены периферийные тросики.
| ШПАГОВЫЙ МАНИПУЛЯТОР | 0 |
|
SU177749A1 |
| Манипулятор шпагового типа | 1960 |
|
SU137594A1 |
| Манипулятор шпаговый | 1958 |
|
SU117241A1 |
| Шпаговый манипулятор | 1963 |
|
SU172597A1 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| US 20120132450 A1, 31.05.2012. | |||

