Известны системы позиционного программного управления станками с шаговым приводом подач, в которых шаговый привод имеет ограничение по частоте приемистости. Для увеличения диапазона скоростей применяют плавный разгон и замедление шагового двигателя на частотах выше частоты приемистости.
Введение плавного разгона и торможения приводит к усложнению, удорожанию систем программного управления и снижению надежности. Это ограничивает применение шагового привода особенно в дешевых станках с устройствами позиционного управления: сверлильных, малых станках для изготовления печатных плат и др.
Цель системы - увеличение производительности станка.
Достигается это благодаря тому, что с валом шагового двигателя соединен вал вспомогательного, например, асинхронного двигателя, а входные клапаны коммутатора соединены соответственно через клапаны запрета и переключения с дополнительно введенными в систему генераторами предельной и ползучей скорости, причем входы клапанов запрета и переключения соединены с блоком сравнения.
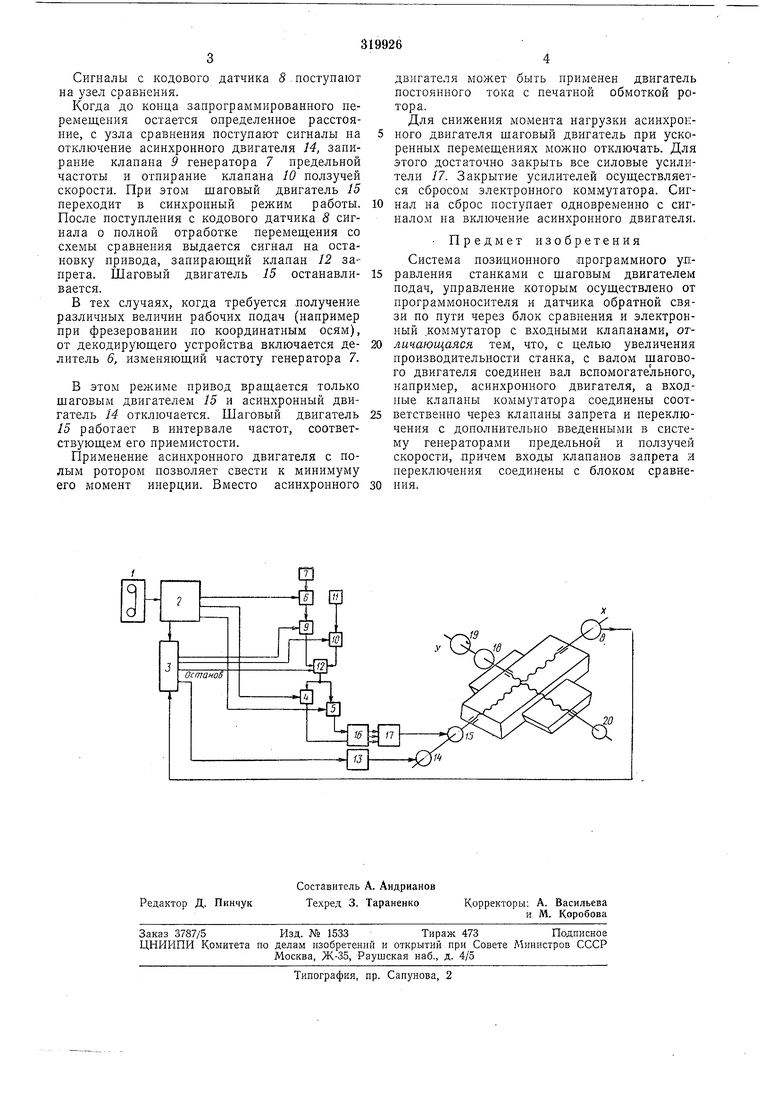
Программа задается на перфоленте. Сигналы со считывающего устройства 1 поступают в декодирующий узел 2. Выходы декодирующего узла 2 соединены с узлом 3 сравнения запрограммированного перемещения, с отработанными клапанами 4, 5 реверса и делителем 6 генератора 7. Другой вход узла 3 сравнения соединен с кодовым датчиком 8 обратной связи по пути. Выходы узла сравнения соединены с клапанами 9, 10 переключения генераторов 7 и 11 .предельной и ползучей скоростей, а также с клапаном 12 запрета и блоком 13 управления асинхронного двигателя 14. Шаговый двигатель 15 вращает ходовой винт станка. Управление щаговым двигателем 15 выполняется электронным коммутатором 16 через силовые усилители 17.
Схема для другой координаты вынолняется аналогично рассмотренной: ходовой винт координаты «у связан с шаговым двигателем 18 этой координаты, асинхронным двигателем 19 и кодовым датчиком 20. При записи команды на ускоренное перемещение включается асинхронный двигатель 14, открывается клапан 9, и на электронный коммутатор 16 через один из клапанов реверса поступает предельная частота.
Сигналы с кодового датчика 5-поступают иа узел сравнения.
Когда до конца запрограммированного перемещения остается олределенное расстояние, с узла сравнения поступают сигналы на отключение асинхронного двигателя 14, запирание клапана 9 генератора 7 предельной частоты и отпирание клапана 10 ползучей скорости. При этом шаговый двигатель 15 переходит в синхронный режим работы. После поступления с кодового датчика 8 сигнала о полной отработке перемещения со схемы сравнения выдается сигнал на остановку привода, запирающий клапан 12 запрета. Шаговый двигатель 15 останавливается.
В тех случаях, когда требуется получение различных величин рабочих подач (например при фрезеровании по координатным осям), от декодирующего устройства включается делитель 6, изменяющий частоту генератора 7.
В этом режиме привод вращается только шаговым двигателем 15 и асинхронный двигатель 14 отключается. Шаговый двигатель 15 работает в интервале частот, соответствующем его приемистости.
Применение асинхронного двигателя с полым ротором позволяет свести к минимуму его момент инерции. Вместо асинхронного
двигателя может оьггь применен двигатель постоянного тока с печатной обмоткой ротора.
Для снижения момента нагрузки асинхронного двигателя шаговый двигатель при ускоренных перемещениях можно отключать. Для этого достаточно закрыть все силовые усилители 17. Закрытие усилителей осуществляется сбросом электронного коммутатора. Сигнал на сброс поступает одновременно с сигналом на включение асинхронного двигателя.
Предмет изобретения
Система позиционного программного управления станками с шаговым двигателем подач, управление которым осуществлено от программоносителя и датчика обратной связи но пути через блок сравнения и электронный .коммутатор с входными клапанами, отличающаяся тем, что, с целью увеличения производительности станка, с валом шагового двигателя соединен вал вспомогательного, например, асинхронного двигателя, а входные клапаны коммутатора соединены соответственно через клапаны запрета и переключения с дополнительно введенными в систему генераторами предельной и ползучей скорости, причем входы клапанов запрета и переключения соединены с блоком сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ С ШАГОВЫМПРИВОДОМ | 1972 |
|
SU336646A1 |
| аСЕС©Юч1НАЯ | 1973 |
|
SU367198A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU748431A1 |
| Устройство для точного остановапРиВОдА ВРАщЕНия | 1979 |
|
SU814649A1 |
| Многоточечное регистрирующее устройство | 1977 |
|
SU877328A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Устройство для программного управления сварочной машиной | 1973 |
|
SU488191A1 |
| КООРДИНАТОГРАФ | 1971 |
|
SU319844A1 |
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU924816A1 |
| АВТОМАТИЗИРОВАННЫЙ РЕЗЬБОНАРЕЗНОЙ ШПИНДЕЛЬ | 1993 |
|
RU2069608C1 |
