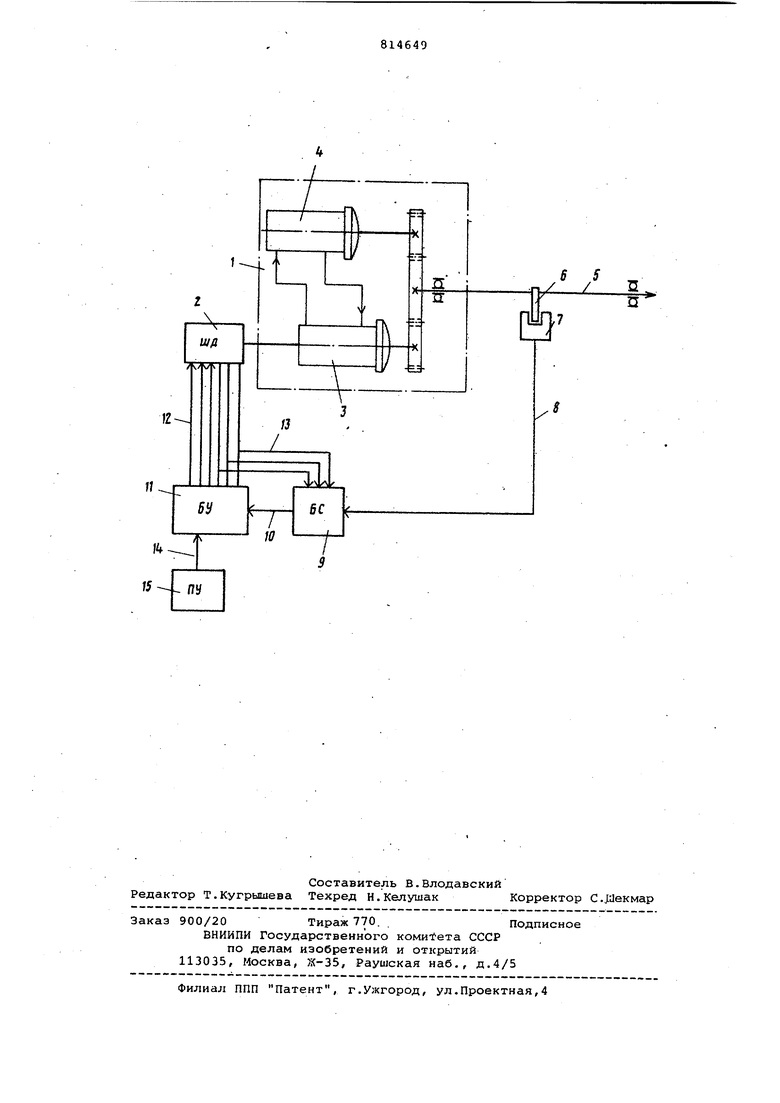
Изобретение относится к станко.строению, точнее к стайкам с програм мным управлением. Известны устройств для точного останова привода вргидения, содержащие механизмы привода вращения и его останова, электрически связанные с датчиком положения и пластиной его переключения Ц . .Недостатком таких устройств являе ся сложность конструкции и низкая точность останова. Цель изобретения - повышение точности останова шагового двигателя при использовании устройства в станках с ЧПУ. Эта цель достигается тем, что пластина переключения датчика положе ния выполнена шириной, соответствующей одному периоду повторяемости фаз шагового двигателя, а связь шагового двигателя с датчиком осуществлена через блок сравнения и блок управления двигателем. На чертеже представлено предлагаемое устройство. Вращение привода 1 осуществляется от шагового двигателя 2 (например, как силового, так и пассивного), с гидравлическим усилителем, состоящим из следящего золотника, 3 и гидромотора 4. На валу 5 привода 1 вращения жестко закреплена пластина (флажок) 6 с шириной, определяющей начало и конец срабатывания датчика 7 положения. Датчик 7 положения электрически связан линией 8 связи с блоком 9 совпадения, соединенного линией 10 связи с блоком 11 управления, который управляет по. линии 12 связи шаговым двигателем 2, например шестйфазным, причем три фазы с помощью линии 13 связи соединены с блоком 9 совпадения. Каждый импульс, поступающий на блок 11 управления по линии 14 связи с программного устройства 15, приводит к изменению количества фаз, находящихся под током, и к повороту шагового двигателя нашаг, равный цене импульса, например 1,5. Управление вращением привода осуществляется от программного устройства 15 любым программоносителем, в виде перфоленты, магнитной Ленты и т.д., когда задается частота импульсов, т.е. число оборотов привода в минуту и, если требуется, число импульсов, определяющее угловое перемещение привод.а вращения.
Точный останов привода 1 вращения происходит следующим образом.
По команде Стоп с программного устройства 15 оборота привода 1 вращения плавно изменяются до ползучей скорости (т.е. меняется частота импульсов)..
В момент попадания пластины 6 в прорезь датчика 7 положения на входе блока 9 совпадения появляется сигнал который держится до тех пор, пока пластина 6 находится в прорези датчика 7 положения.
Блок И управления продолжает коммутировать обмотки шагового двигателя 2 до тех пор, пока не появится напряжение в трех фазах, соединенных линией 13 связи с блоком 9 совпадения. Блок 9 совпадения дает запрет по линии 10 связи на блок 11 управления и шаговый двигатель 2 останавливается, определив тем самым точное угл вое полох ение привода 1 вращения.
Датчик 7 положения в предлагаемом изобретении разрешает поиск точного останова привода 1 вращения, т.е. определяет зону, в которой происходит поиск точного останова, а само положение останова определяется шаговым двигателем 2, который, кроме управления вращением, выполняет дополнительную функцию точного останова привода 1 вращения.
Предлагаемое устройство значительно повышает точность oci-aHOBa и упрощает конструкцию привода вращения.
При шестифазной схеме управления ширина пластины определяется следующим образом.
Через 12 импульсов происходит повторение фаз, т.е. повторение состояния включенных обмоток.
Для остановки шагового двигателя 2 необходимо определенное состояние напряжения в трех фазах,что вызывает запрет блока 9 совпадения и его останов.
Такое состояние повторяется в устройстве 20 раз за один оборот шагового двигателя 2.Ширина пластины 6 выбирается конкретно для данного случая таким образом, чтобы датчик 7 положения был во включенном состоянии во время входа и выхода пластины б в течение 12 импульсов, т.е., должен входить во взаимодействие с датчиком 7, при повороте пластины 6 и цене импульса 1,5° на угол,равный ,5® 18°.
Формула изобретения
Устройство для точного останова привода вращения содержащее механизмы привода вращения и его останова, электрически связанные с датчиком положения и пластиной его переключения, отличаю щеес я тем, что, с целью повышения точности останова шагового двигателя при использовании устройства в станках с ЧПУ, пластина переключения датчика положения выполнена шириной,
соответствующей одному периоду повторяемости фаз шагового двигателя, а связь шагового двигателя с датчиком осуществлена через блок сравнения и блок управления двигателем.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 40 № 275656, кл. В 23 В 47/04, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для намотки электрических катушек | 1982 |
|
SU1108518A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯСТАНКОМ | 1972 |
|
SU453671A1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1980 |
|
SU959036A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Система управления приводом подач зубофрезерного станка | 1984 |
|
SU1171284A1 |
| Круглошлифовальный станок с ЧПУ | 1977 |
|
SU1144852A1 |
| Следящий электропривод | 1985 |
|
SU1259207A2 |
| Способ управления шаговым двигателем | 1989 |
|
SU1723653A1 |