Изобретение относится к области автоматического управления и коптроля н может быть иснользовано для определения динамических свойств преобразователя ускорения во временной интервал.
Известны устройства для измерения динамической ошибки преобразователя ускорения во временной интервал, содержащие имитатор задающего сигнала, акселерометр, усилитель, щиротно-импульсный модулятор, ключевую схему и стабилизатор тока. В качестве имитатора задающего сигнала в таких устройствах используются сложные прецизиониые механические устройства (делительные головки, синусные механизмы, центрифуги, линейные вибраторы н т. д.), позволяющие имитировать различные типы воздействия ускорения на ось подвеса акселерометра.
Для онределения динамических свойств преобразователя ускорения во временной интервал необходимо создать имитирующий сигнал, воздействующий на ось подвеса маятника. Однако механические имитирующие устройства имеют, например, мертвый ход, .инерционность, трение и т. д. Указанные недостатки ведут к трудности имитации с желаемой точностью различных типов воздействия на акселерометр.
ляюп1,его имитировать различные типы воздействия и в сочетании с исследуемым преобразователем определять с высокой точностью его динамическую ошибку.
Это достигается тем, что в устройстве нмнтатор задающего снгнала содержит генератор, выход которого через щнротно-импульсный модулятор и ключевую схем}, подключеииую к стабилизатору тока, соединеи с дополнительной обмоткой акселерометра.
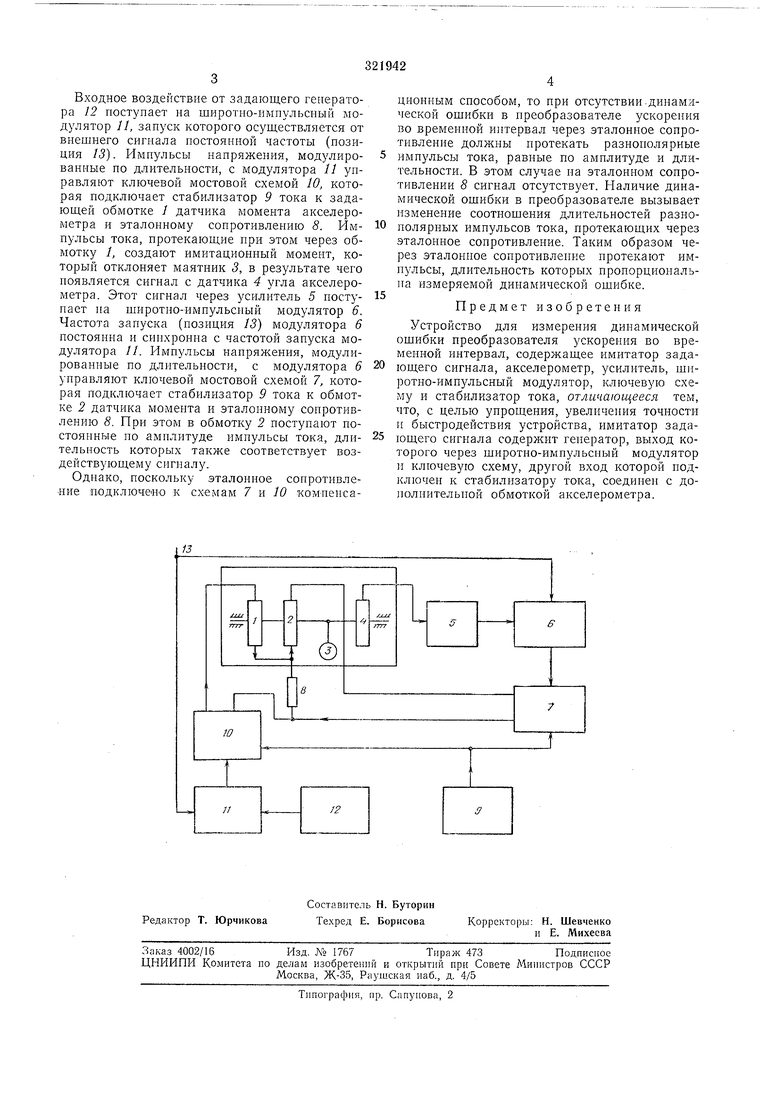
Иа чертеже изображена схема предлагаемого устройства.
Устройство имеет акселерометр, содержащий датчик момеита с задающее обмоткой / и обмоткой 2 обратной связи, маятник 3 н датчик 4 угла, выход которого через усилитель 5 подключеи ко входу электронного щиротноимнульсиого модулятора 6. Выход щиротноимиульсного модулятора соединен со входом ключевой мостовой схемы 7, в одну из диагоналей которой последовательно включены обмотка 2 и эталонное сопротнвление S, а в другую - стабилизатор 9 тока. Последний подключен к одной из диагоналей ключевой мостовой схемы 10, вход которой через щиротно-импульсный модулятор // соединен с выходом задающего генератора 12. В другую диагональ мостовой схемы W последовательно включены эталоиное соиротнвление 8 и обмотка / датчика момента акселерометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ АКСЕЛЕРОМЕТР | 1971 |
|
SU317977A1 |
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
| Цифровой акселерометр | 1982 |
|
SU1081548A1 |
| Стабилизированный преобразователь постоянного напряжения | 1981 |
|
SU995227A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| Акселерометр | 1980 |
|
SU901916A1 |
| Устройство для управления преобразователем напряжения | 1983 |
|
SU1112525A2 |
| ПРЕЦИЗИОННЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ИЗМЕРИТЕЛЬ | 2001 |
|
RU2194997C1 |
| ОСЕВОЙ КОМПЕНСАЦИОННЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР С НЕКОНТАКТНЫМ ПОДВЕСОМ ИНЕРЦИОННОЙ МАССЫ | 1997 |
|
RU2128345C1 |
| Трехкомпонентный акселерометр | 1981 |
|
SU1049432A1 |
