Изобретение предназначено для использования в области машиностроения, в частности в металлообрабатывающей промышленности.
Известны MexaHH3N bi загрузки и выгрузки деталей, содержащие два поворотных от привода рычага, жестко зафиксированных один относительно другого. Эти механизмы, кроме рабочего хада, имеют еще и холостой ход при установке рычагов в прОМежуточное положение до окончания обработки.
Предлагаемый механизм отличается тем, что в нем -ведомый рычаг шарнирно закреплен на плече ведущего рычага и связан с приводом кинематической связью, обеспечивающей его встречное перемещение относительно ведущего рычага. Такая конструкция механизма обеспечивает повышение производительности, так как холостой ход рычагов исключается.
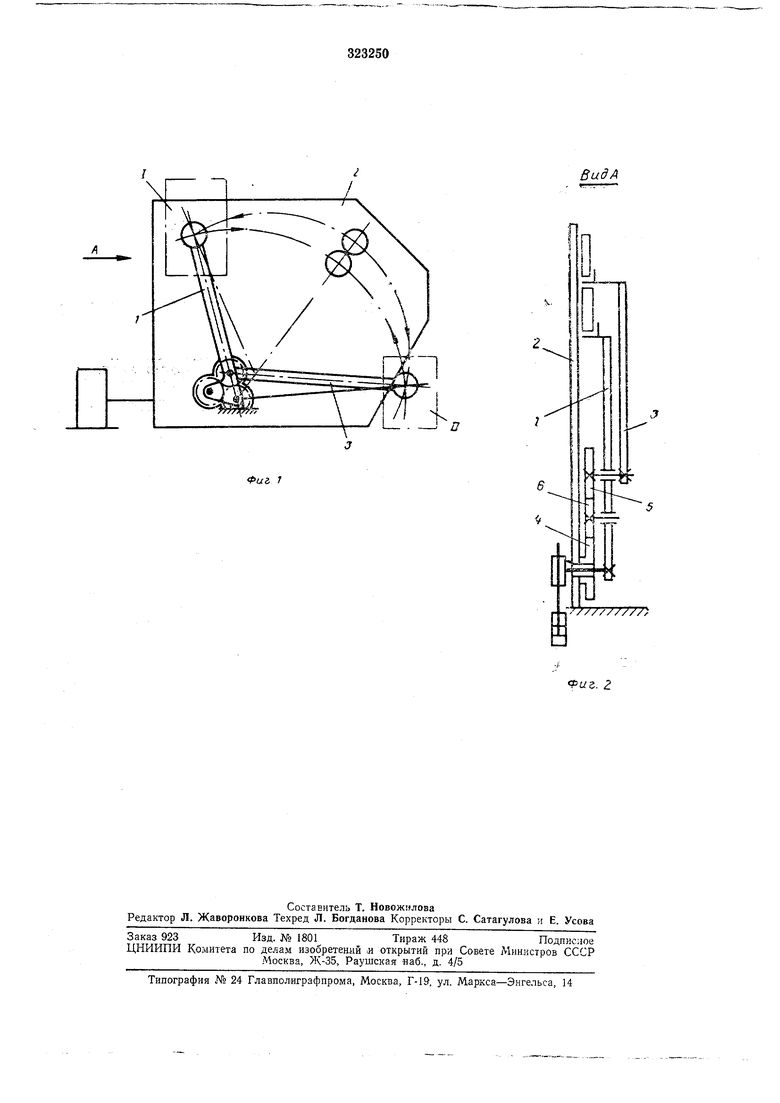
На фиг. 1 представлена кинематическая схема описываемого механизма; на фиг. 2 - то же, вид по -стрелке А.
Механизм загрузки и выгрузки деталей состоит из двух рычагов: ведущего /, шарнирно закрепленного на корпусе 2, и ведомого 3, шарнирно установленного на плече ведущего рычага. Соосно с ведущим рычагом на корпусе 2 .неподвижно крепится зубчатый сектор 4. На оси ведомого рычага установлена шестеряя 5, передающая «рутящий момент на этот рычаг; на -ведущем рычаге на шарнире установлена шестерня 6, которая обкатывается по зубчатому сектору и связана с шестерней 5 на рычаге 3. При повороте рычага / щестерня 6, обкатываясь по неподвижиому зубчатому сек тору 4, поворачивает рычаг 3 через шестерню 5 в противоположном направлении.
В исходном положении, например, рычаг 1 находится в зоне / загрузки и выгрузки деталей, а рычаг 3 - в зоне // обра1ботки. Получив движение от привода, рычаг / перемещает необработанную деталь из зоны / в зону П, а рычаг 3 с обработанной деталью одновременно перемещается из зоны // в зону /. Затем дикл повторяется.
Оба рычага совершают загрузку и выгрузку деталей в одной плоскости и в конечное положение приходят одновременно.
Предмет изобретения
Механизм загрузки и выгрузки деталей, содержащий два поворотных от привода рычага, отличающийся тем, что, с |целью повышения пронзвоиительности, ведомый рычаг щарнирно закреплен на плече ведущего рычага и связан с приводом кинематической связью, обеспечивающей его встречное перемещение относительно ведущего рычага.
Фиг, J
ВидА
Фиг. 2.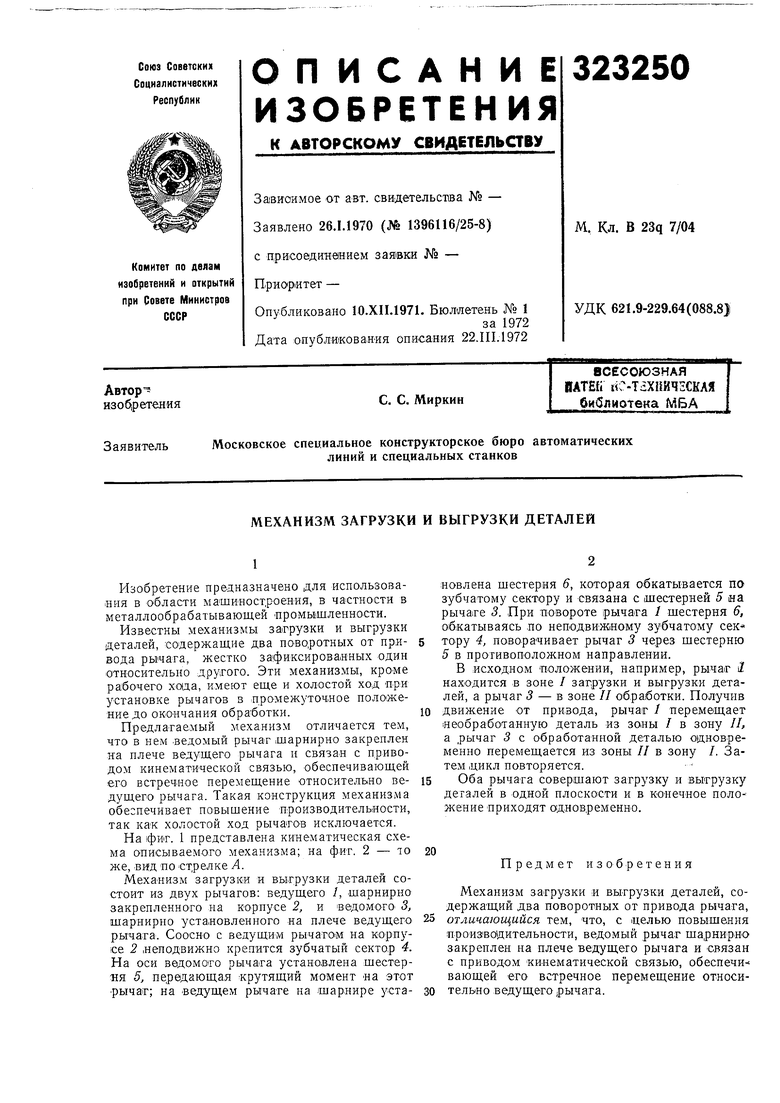
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОРРЕКЦИИ УГЛОВОГО ПОЛОЖЕНИЯ КУЛАЧКОВОГО ВАЛА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2020 |
|
RU2751426C1 |
| УЗЕЛ КОНТАКТНОЙ СИСТЕМЫ РАЗЪЕДИНИТЕЛЯ | 2020 |
|
RU2755487C1 |
| Центробежный корректор углового положения кулачкового вала двигателя внутреннего сгорания | 2019 |
|
RU2735371C1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПРОВОЛОЧНЫХ ИЗДЕЛИЙ СЛОЖНОЙ КОНФИГУРАЦИИ | 1992 |
|
RU2050216C1 |
| КУЛАЧКОВЫЙ ИМПУЛЬСНЫЙ ВАРИАТОР | 2007 |
|
RU2352840C1 |
| Промышленный робот | 1984 |
|
SU1268252A1 |
| СИСТЕМА ЗАРЯЖАНИЯ АВТОМАТИЧЕСКОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2003 |
|
RU2231728C1 |
| Двухвалковая дробилка | 1979 |
|
SU902805A1 |
| Командный блок устройства управления передней опорой шасси самолета (варианты) | 2018 |
|
RU2695967C1 |