Изобретение относится к автоматизации управления летательных аппаратов.
Известны датчики угловых отклонений троса внешней подвески груза вертолета, содержащие силовую раму и две дуги или дугообразных рамы, концы которых шарнирно прикреплены к силовой раме, причем ось вращения одной из дуг или дугообразных рам расположена .параллельно продольной оси вертолета, а ось вращения другой дуги нли полурамы параллельна его поперечной оси.
На некоторых модификациях вертолетов эти датчики монтируются IB верхней части специальной шахты, расположенной внутри фюзеляжа. В шахту втягивается изделие, подвешенное к тросу внешней подвески в транспортном положении, приближаясь своей головной частью почти вплотную к датчику угловых отклонений.
Так как размеры шахты существенно ограничены по диаметру, а трос внешней подвески имеет «заделку в верхней части шахты, т. е. несколько выше места установки датчика, угловые отклонения троса ограничены.
Отклонившись иа некоторый угол, трос неминуемо будет задевать за нижий обрез шахты, при этом дуги ИЛИ полурамы датчика более не отклоняются, даже при все более увеличиваюшемся угле отклонения троса внешней подвески. Это приводит к тому, что электрический сигнал на выходе из датчика может не соответствовать действительному положению троса.
С целью увеличения точности и расширения диапазона работы предлагаемый датчик угловых отклонений троса снабжен направляющими, соединенными между собой вверху и внизу кольцами, в силовой раме выполнены прорези, а на нижнем кольце смонтированы замки.
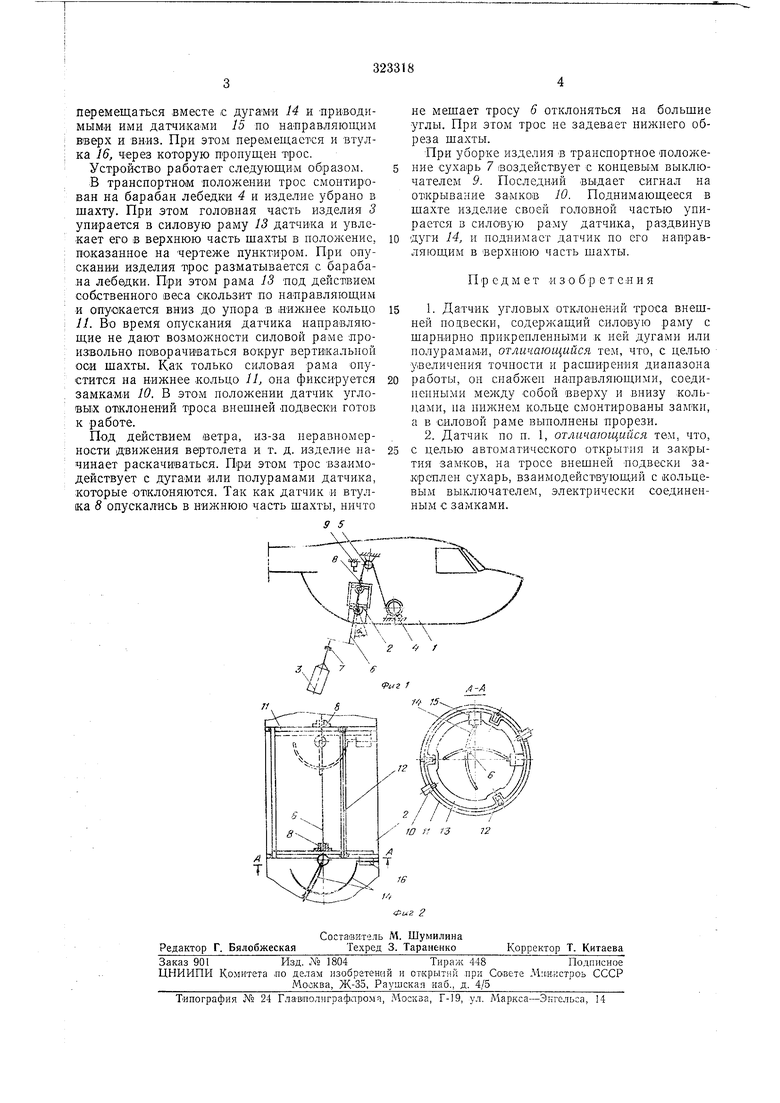
На фиг. 1 показана установка датчика в фюзеляже вертолета; на фиг. 2 - датчик, продольный разрез.
В фюзеляже 1 вертолета смонтирована щахта 2 для выпускающегося изделия 3. Там же закреплена лебедка 4 и ролик 5, необходимые для выпуска и уборки троса 6. На тросе закреплен сухарь 7. Трос пропущен через втулку 8. Над шахтой смонтирован концевой выключатель Я электрически соединенный с замками 10, которые установлены на нижнем кольце 11 датчика. Замки могут иметь электрический привод.
На фиг. 2 убранное, походное положение датчика показано пунктиром, рабочее положение - сплошными линиями.
Датчик снабжен направляющими 12, скрепленными внизу и вверху кольцами. Силовая рама 13 датчика угло1вых отклонений имеет прорези до числу направляющ-их и способна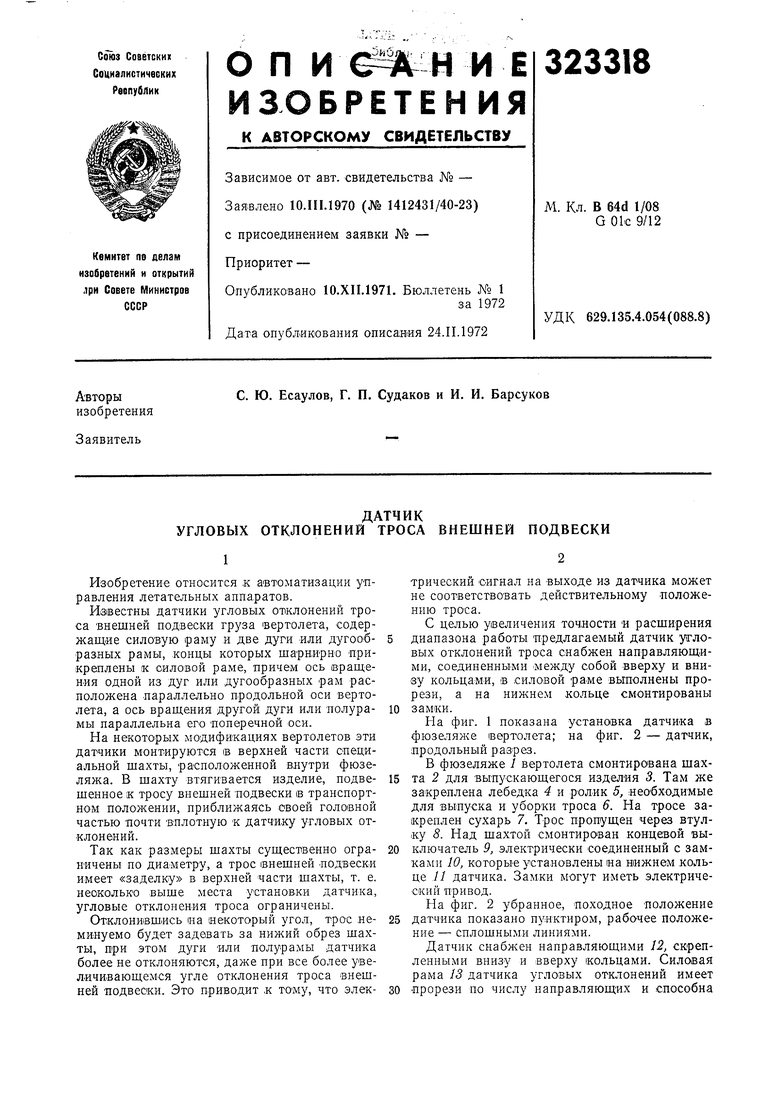
| название | год | авторы | номер документа |
|---|---|---|---|
| С. В. КО^О:отилкин | 1967 |
|
SU200787A1 |
| ДАТЧИК УГЛОВЫХ ОТКЛОНЕНИЙ ТРОСА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА ВЕРТОЛЕТА | 1967 |
|
SU200788A1 |
| УСТРОЙСТВО ДЛЯ ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2763621C1 |
| УСТРОЙСТВО ДЛЯ ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА ВЕРТОЛЁТА | 2022 |
|
RU2785246C1 |
| АВИАЦИОННОЕ УСТРОЙСТВО ДЛЯ ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА | 2021 |
|
RU2772134C1 |
| СПАСАТЕЛЬНАЯ СИСТЕМА С ВНЕШНЕЙ ПОДВЕСКОЙ К ЛЕТАТЕЛЬНОМУ АППАРАТУ | 2014 |
|
RU2563291C1 |
| ГИБРИДНОЕ ВОЗДУШНОЕ СУДНО | 1996 |
|
RU2160689C2 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 2001 |
|
RU2213028C2 |
| ПАЛУБНЫЙ АВИАЦИОННЫЙ БЕСПИЛОТНЫЙ ПРОТИВОЛОДОЧНЫЙ КОМПЛЕКС (ПАБПК) | 2017 |
|
RU2684160C1 |
| ПОЖАРНЫЙ ГИДРОВЕРТОЛЕТ-КРАН | 2022 |
|
RU2797539C1 |
