Изобретение относится к подъемно-тран1. портному оборудованию заводов сборного железобетона.
Известен кантователь-траверса для коробчатых изделий, включающий захват с шарнирными и глухими пальцами, упор и стропы.
Известный кантователь-траверса имеет тот недостаток, что требует большого количества трудоемких операций по строповке.
Цель настоящего изобретения заключается в умеиьщении количества перестроповок и исключении трудоемких ручных операций. Достигается это тем, что упор выполпен песущим и снабжен управляемым с пола запорным нальцем.
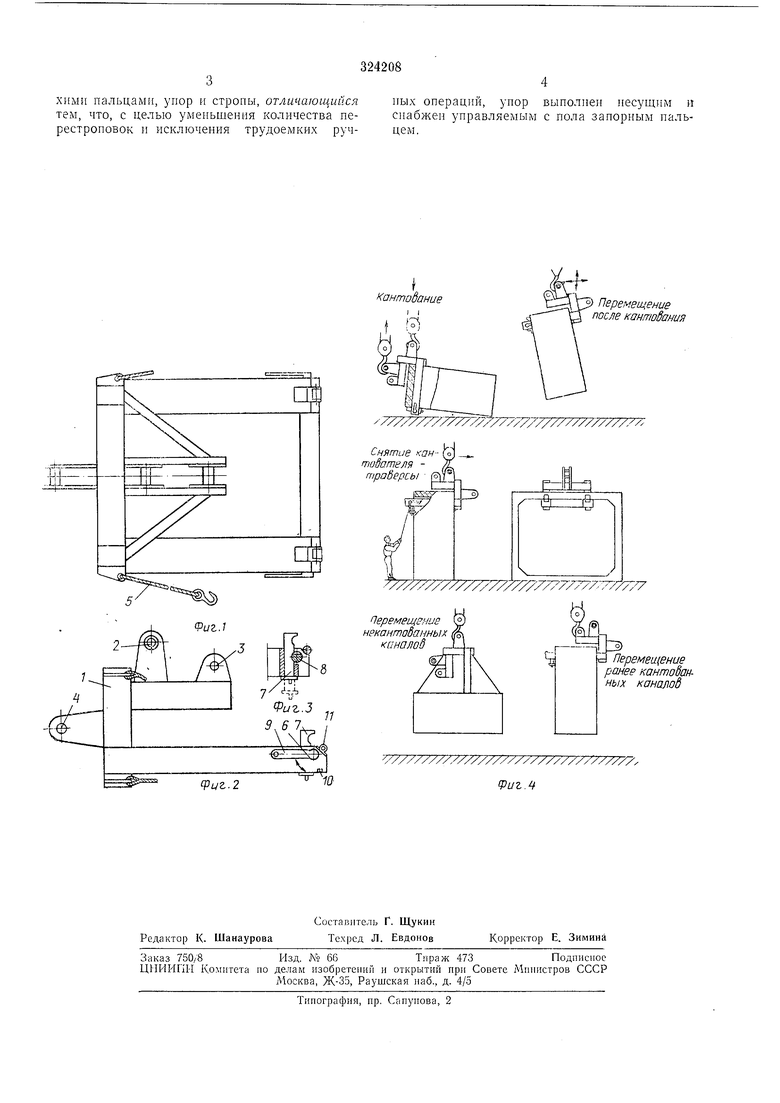
Иа фиг. 1 изображен предлагаемый кантоиатель-траверса, вид спереди; на фиг. 2 - то же, вид сбоку; па фиг. 3 - замок в разрезе; иа фиг. 4 - схема работы кантователя-траверсы.
Кантователь-траверса состоит из жесткой рамы / с одиим шарнирным 2 и двумя глухими 3 и 4 пальцами, четырьмя короткими строГ ами 5 и двумя замками 6. Замок 6 включает подвижный упор 7 и запорный палец 8 с рычагом 9. В открытом положении заиорный палец 8 фиксируется упором 10. Чтобы кантователь-траверса легко перемещался по стенкам изделия, на концах жесткой рамы / смонтированы два ролика //. Шарнирный палец 2 смещеп относитель 1о цеитра тяжести изделия, чтобы псключ 1ть при кантоваппп рывки.
Кантователь-траверса работает следующим образом.
При выемке изделий из формы и для перемещения к месту капто15апия используются стропы 5. Для кантования ка1ггователь-траверса надевается па стеику изделия, замок 6 закрывается и крюк заводится под niapnnpпый палец 2, после чего изделие иоднимаегся и одиовременно кантуется. Затем изделие перемещается ПГ1 склад или грузится на траиспортпое средство.
При поставлеппом пзделии пропзводяг отппраппе замка 6. Оттяжкой поворачпваегся рычаг 9 запорного кольца 6, и упор 7 под тя/кестыо собственного веса опускается.
При перемещении пли погрузке рапее перекантованных изде.1ий кйнто 5атель-траве1ка
свободно завод тся своим захватом за стеику изделия, а чтобы изделие TpaiicnojiTHpOBaлось без крепа, крюк крапа завод1ггся иод глухой палец 3. Замок 6 в этом случае закрывать ие надо.
25
XHMJi пальцами, упор и стропы, отличающийся тем, что, с целью умепьшения количества перестроповок п исключения трудоемких ручпых операций, упор выполпеп песущим и сиабжеп управляемым с пола запорпым пальцем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| КАССБТНО-СТЕНДОВАЯ ФОРМОВОЧНАЯ МАШИНА | 1972 |
|
SU324154A1 |
| КАНТОВАТЕЛЬ-МАНИПУЛЯТОР | 1991 |
|
RU2063372C1 |
| УСТРОЙСТВО БАЛЛАСТИРОВАНИЯ ДЛЯ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2336221C2 |
| Захват для строительных изделий без монтажных петель | 1978 |
|
SU775278A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ СТРОПОВКИ КОЛОНН | 1971 |
|
SU301307A1 |
| Устройство для удаления облоя | 1983 |
|
SU1177165A1 |
| Устройство для удаления облоя | 1986 |
|
SU1362640A2 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 2003 |
|
RU2299171C2 |
| ШТЫРЬЕВОЙ ЗАМОК ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1991 |
|
RU2013345C1 |
да
фуг.2
° Перемещение после кантоёания
Перемещение ранее кантобанных каналод
(Риг.ч
