1
Изобретение относится к механизации строительства и может быть использовано при подъеме бетонных- и железобетонных изделий без-стационарных монтажных петель в процессе из- 5 готовления, транспортировки и монтажа этих изделий.
Известен захват для строительных изделий, содержащий корпус с осью, на которой смонтирюван поворотный 10 опорный элемент t lЗахват предназначен для подъема изделий, имеющих сквозные отверстия. Установка захвата на изделии производится следующим образом: захват |5 заводится в отверстие, опорный элемент поворачивается относительно оси на 90 и в таком положении захвата изделие поднимается.
Недостатки захвата такой конструк-20 ции состоят в сравнительно больших размерах и невозможности управления опорным элементом.
Наиболее близким к изобретению по технической сущности и достигае- 25 мому результату является захват для строительных изделий без монтажных петель, содержащий корпус со смонтированным в нем на оси поворотным опорным элементом 2.
Недостатками известного захвата являются отсутствие связи между корпусом и опорным элементом, такой связи, которая позволяла бы фиксировать опорный элемент в крайних положениях (а также, если необходимо, и в промежуточных положениях), а также необходимость перехода на другую сторону изделия, чтобы перевести опорный элемент захвата в нерабочее положение (сложить захват), если необходимо вынуть захват из изделия вверх через отверстие.
Цель изобретения - обеспечение управления опорным элементом.
Достигается это тем, что захват для строительных изделий без монтажных петель, содержащий корпус.со смонтированным в нем на оси поворотным опорнь элементом, снабжен шарнирно установленным на корпусе рычагом и связанной с ним тягой, несущей на своем конце палец, установленный в выполненных на одной из внутренних граней корпуса и на прилегающей к ней грани опорного элемента пересекающихся между собой .направляющих канавках.
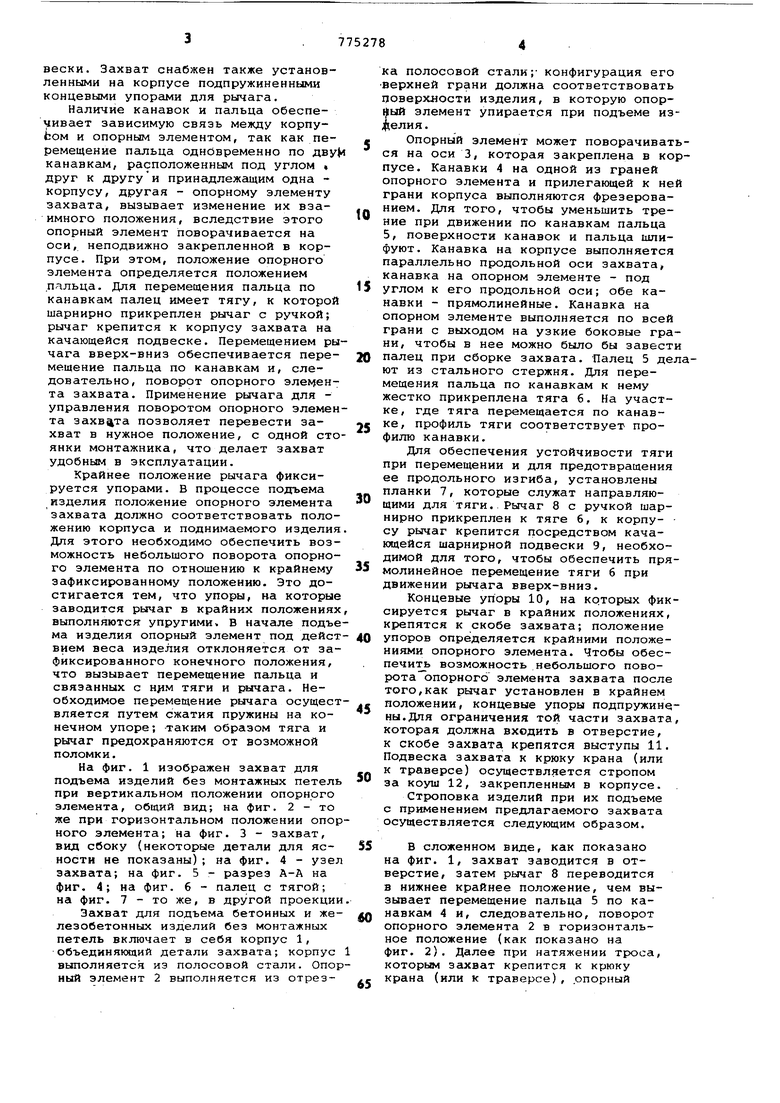
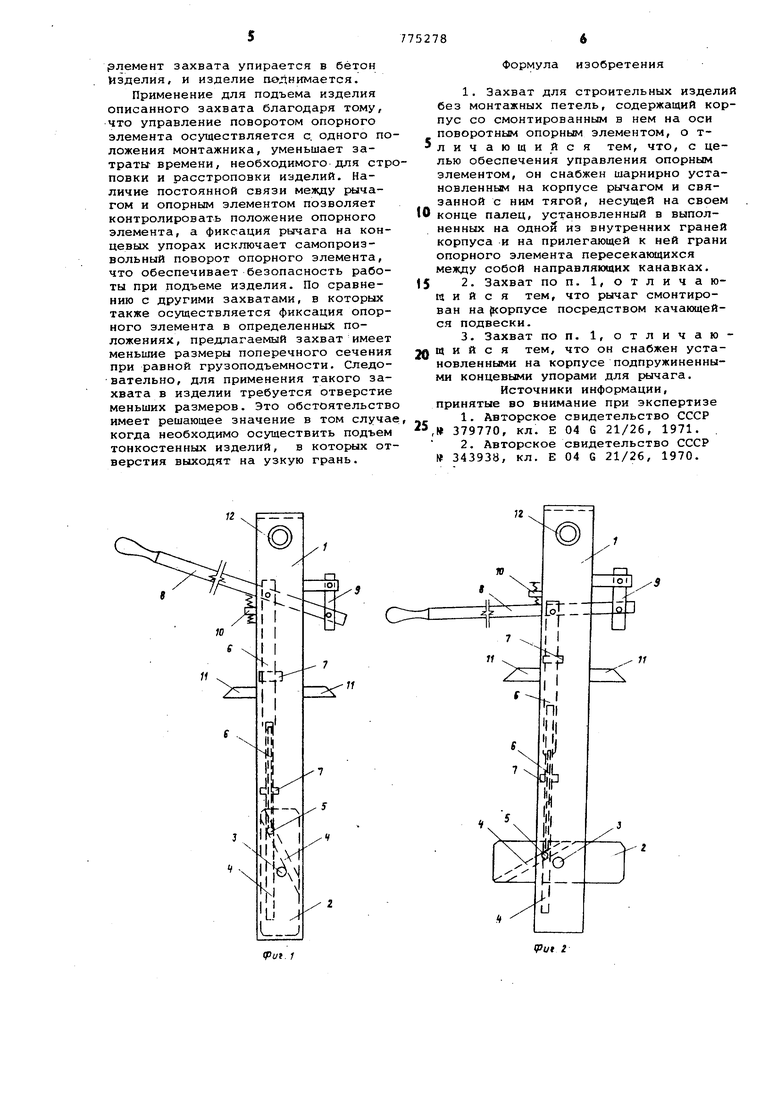
Кроме того, рычаг смонтирован на -корпусе посредством качающейся под; вески. Захват снабжен также установленными на корпусе подпружиненными концевыми упорами для рычага. Наличие канавок и пальца обеспечивает зависимую связь между корпуfcoM и опорным элементом, так как перемещение пальца одновременно по дву канавкам, расположенным под углом « друг к другу и принадлежащим одна корпусу, другая - опорному элементу захвата, вызывает изменение их взаимного положения, вследствие этого опорный элемент поворачивается на оси, неподвижно закрепленной в корпусе. При этом, положение опорного элемента определяется положением пальца. Для перемещения пальца по канавкам палец имеет тягу, к которой шарнирно прикреплен рычаг с ручкой; рычаг крепится к корпусу захвата на качающейся подвеске. Перемещением ры чага вверх-вниз обеспечивается перемещение пальца по канавкам и, следовательно, поворот опорного элемента захвата. Применение рычага для управления поворотом опорного элемен та захвата позволяет перевести захват в нужное положение, с одной сто янки монтажника, что делает захват удобным в эксплуатации, Крайнее положение рычага фиксируется упорами. В процессе подъема изделия положение опорного элемента захвата должно соответствовать положению корпуса и поднимаемого изделия Для этого необходимо обеспечить возможность небольшого поворота опорного элемента по отношению к крайнему зафиксированному положению. Это достигается тем, что упоры, на которые заводится рычаг в крайних положения выполняются упругими. В начале подъ ма изделия опорный элемент под дейс вием веса изделия отклоняется от за фиксированного конечного положения, что вызывает перемещение пальца и связанных с HfiM тяги и рычага. Необходимое перемещение рычага осущес вляется путем сжатия пружины на конечном упоре; -таким образом тяга и рычаг предохраняются от возможной поломки. На фиг. 1 изображен захват для подъема изделий без монтажных петел при вертикальном положении опорного элемента, общий вид; на фиг. 2 - то же при горизонтальном положении опо ного элемента; на фиг, 3 - захват, вид сбоку (некоторые детали для ясности не показаны); на фиг, 4 - узе захвата; на фиг. 5 - разрез А-А на фиг, 4; на фиг. 6 - палец с тягой; на фиг, 7 - то же, в другой проекци Захват для подъема бетонных и же лезобетонных изделий без монтажных петель включает в себя корпус 1, объединяющий детали захвата; корпус выполняется из полосовой стали. Опо ный элемент 2 выполняется из отреза полосовой стали; конфигурация его ерхней грани должна соответствовать оверхности изделия, в которую опорйый элемент упирается при подъеме изелня. Опорный элемент может поворачиваться на оси 3, которая закреплена в корпусе. Канавки 4 на одной из граней опорного элемента и прилегающей к ней грани корпуса выполняются фрезерованием. Для того, чтобы уменьшить трение при движении по канавкам пальца 5, поверхности канавок и пальца шлифуют. Канавка на корпусе выполняется параллельно продольной оси захвата, канавка на опорном элементе - под углом к его продольной оси; обе канавки - прямолинейные. Канавка на опорном элементе выполняется по всей грани с выходом на узкие боковые грани, чтобы в нее можно было бы завести палец при сборке захвата, Палец 5 делают из стального стержня. Для перемещения пальца по канавкам к нему жестко прикреплена тяга 6, На участке, где тяга перемещается по канавке, профиль тяги соответствует профилю канавки. Для обеспечения устойчивости тяги при перемещении и для предотвращения ее продольного изгиба, установлены планки 7, которые служат направляющими для тяги,. Рычаг 8 с ручкой шарнирно прикреплен к тяге 6, к корпу- су рычаг крепится посредством качающейся шарнирной подвески 9, необходимой для того, чтобы обеспечить прямолинейное перемещение тяги 6 при движении рычага вверх-вниз. Концевые упоры 10, на которых фиксируется рычаг в крайних положениях, крепятся к скобе захвата; положение упоров определяется крайними положениями опорного элемента. Чтобы обеспечить возможность небольшого поворотаопорного элемента захвата после того,как рычаг установлен в крайнем положении, концевые упоры подпружинены. Для ограничения той части захвата, которая должна входить в отверстие, к скобе захвата крепятся выступы 11. Подвеска захвата к крюку крана (или к траверсе) осуществляется стропом за коуш 12, закрепленным в корпусе. Строповка изделий при их подъеме с применением предлагаемого захвата осуществляется следующим образом, В сложенном виде, как показано на фиг, 1, захват заводится в отверстие, затем рычаг 8 переводится в нижнее крайнее положение, чем вызывает перемещение пальца 5 по канавкам 4 и, следовательно, поворот опорного элемента 2 в горизонтальное положение (как показано на фиг, 2). Далее при натяжении троса, которым захват крепится к крюку крана (или к траверсе), опорный
элемент захвата упирается в бетон Изделия, и изделие поднимается.
Применение для подъема изделия описанного захвата благодаря тому, что управление поворотом опорного элемента осуществляется с. одного положения монтажника, уменьшает затраты времени, необходимого для стрповки и расстроповки изделий. Наличие постоянной связи между рычагом и опорным элементом позволяет контролировать положение опорного элемента, а фиксация рычага на концевых упорах исключает самопроизвольный поворот опорного элемента, что обеспечивает безопасность работы при подъеме изделия. По сравнению с другими захватами, в которых также осуществляется фиксация опорного элемента в определенных положениях, предлагаемый захват имеет меньшие размеры поперечного сечения при равной грузоподъемности. Следовательно, для применения такого захвата в изделии требуется отверстие меньших размеров. Это обстоятельств имеет решающее значение в том случа когда необходимо осуществить подъем тонкостенных изделий, в которых отверстия выходят на узкую грань.
Формула изобретения
1.Захват для строительных изделий без монтажных петель, содержащий корпус со смонтированным в нем на оси поворотным опорным элементом, о тличающийся тем, что, с целью обеспечения управления опорным элементом, он снабжен шарнирно установленным на корпусе рычагом и связанной с ним тягой, несущей на своем
0 конце палец, установленный в выполненньгх на одной из внутренних граней корпуса и на прилегающей к ней грани опорного элемента пересекающихся между собой направляющих канавках.
2.Захват по п. 1, отличаюSщийся тем, что рычаг смонтирован на {корпусе посредством качающейся подвески.
3.Захват по п. 1, отличающийся тем, что он снабжен уста0новленными на корпусе подпружиненными концевыми упорами для рычага.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
5 379770, кл. Е 04 G 21/26, 1971.
2.Авторское свидетельство СССР 343938, кл. Е 04 G 21/26, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Захватное устройство для изделий с монтажными петлями | 1988 |
|
SU1557065A1 |
| Автоматический магнитный захват | 1978 |
|
SU789368A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Устройство для подъема длинномерной конструкции в вертикальное положение | 1985 |
|
SU1291542A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Шаговый подъемник | 1982 |
|
SU1039867A2 |
| Грузозахватное устройство | 1982 |
|
SU1049410A1 |
| Устройство для гибки фигурных изделий | 1981 |
|
SU1044394A1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ДЕРЕВЯННЫХ ИЗДЕЛИЙ | 1994 |
|
RU2072914C1 |
г
я
к-л
Т)
|| |1,
(t{-}
tl . :Г
I
1 I
QDl/t.J
о
flBw. п
А-А
////Ш/////.
iput.S
