il
Изобретение касается горного машиностроения и может найти применение в тех случаях, где требуется дистанционный контроль и индикация крайних положений одного или нескольких последовательно соединенных гидроцилиндров, например для дистанционного контроля механизированных крепей в шахтах.
Известны датчики контроля положений гидроцилиндров секций механизированных крепей, состоящие из воспринимаюш;его элемента с рабочими магистралями и контрольной линией и исполнительного механизма в виде золотникового гидрораспределителя с двумя обособленными камерами.
Предложенный датчик отличается от известных тем, что гидрораспределитель снабжен редукционными клапанами, соединенными г контрольной линией, и выполнен с регулируемыми дросселями, расположенными между камерами распределителя и сливной магистралью. Это обеспечивает дистанционный контроль положения любого числа гидроцилиндров при одной контрольной линии.
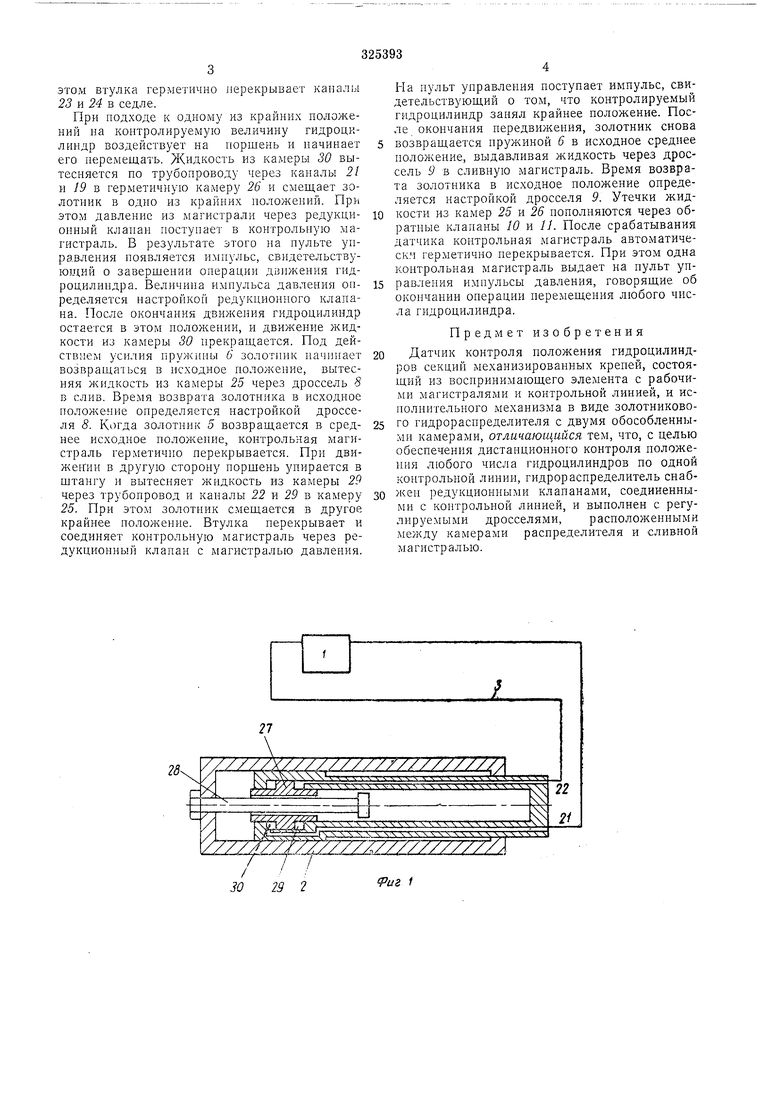
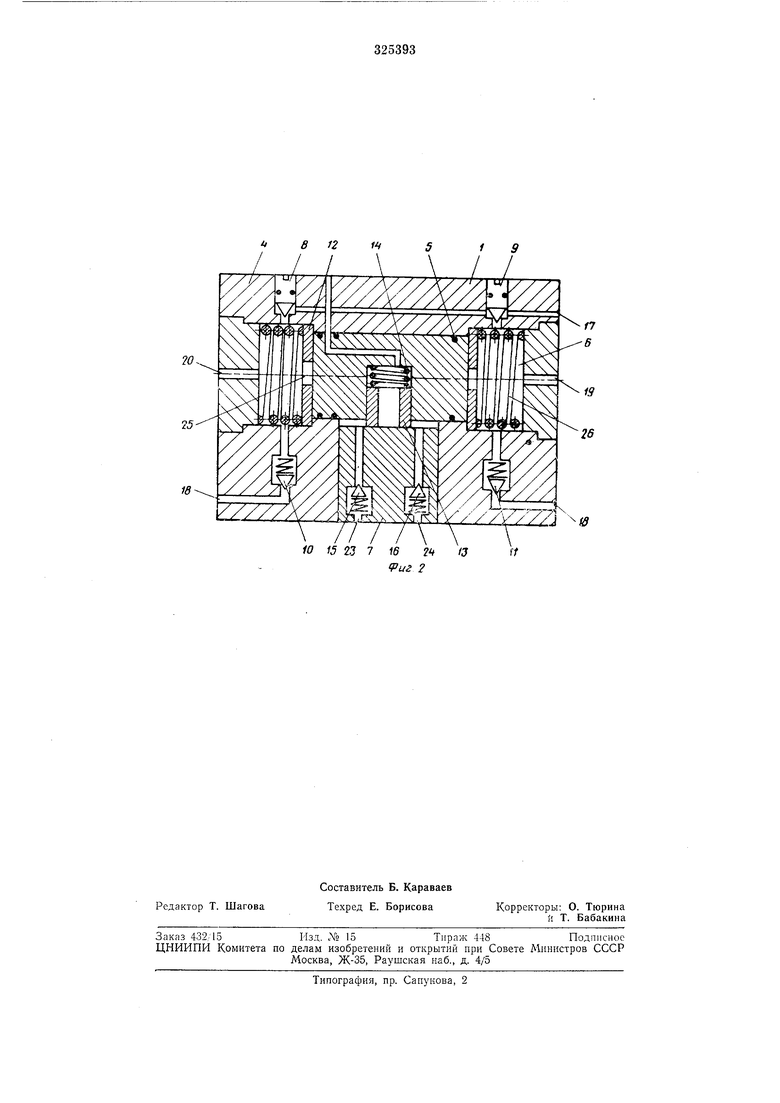
На фиг. 1 изображен предложенный датчик, общий вид; на фиг. 2 - разрез по исполнительной части.
полнительная часть имеет корпус 4, в котором размещаются золотник 5, пружины 5, седло 7, регулируемые дроссели 8 и 9, обратные клапаны 10 и // и шайбы 12. В золотнике выполнена проточка, в которой располагается втулка 13, прижимаемая к седлу давлением жидкости и пружиной 14. Дроссели 8 и Р выполнены в виде игл, которые при вращении изменяют сечение выходного отверстия. В седле размещены редукционные клапаны 15 и 16, настроенные на разные давления. В корпусе выполнены канал 17, соединенный с магистралью давления, канал 18, соединенный со сливом, каналы 19 и 20, соединенные соответственно с каналами 21 и 22 воспринимающего элемента и каналы 23 и 24, соединенные с контрольной магистралью. Корпус и золотник образуют герметичные камеры 25 и 26. Воспринимающий элемент состоит из поршня 27,
размещаемого в расточке контролируемого
гидроцилиндра. Поршень выполнен полым и
сквозь пего проходит штанга 28 с упором.
Штанга неподвижно закреплена в крышке
гидроцилиндра. Расстояние до удара равно
ходу гидроцилиндра. Порщень образует две герметичные камеры 29 и 30, соединенные каналами 22 и 21 соответственно с каналами 20 и 19 камер 25 и 26 исполнительной части датчика. Золотник находится в исходном средэтом втулка герметично перекрывает каналы 23 и 24 в седле.
При подходе к одному из крайних ноложений на контролируемую величину гидроцклиндр воздействует на поршень и начинает его перемещать. Жидкость из камеры 30 вытесняется по трубопроводу через каналы 21 и 19 в герметичную камеру 26 и смещает золотник в одно из крайних полол еннй. При этом давление из магистрали через редукцнонный клапан поступает в контрольную магистраль. В результате этого на пульте управления появляется импульс, свидетельствующий о заверщенин операции движения гидроцнлиндра. Величина импульса давления ойределяется настройкой редукционного клапана. После окончания движения гидроцилиндр остается в этом положении, и движение жидкости из камеры 30 нрекращается. Под действием усилия пружины 6 золотник нач1П1ает возвращаться в исходное положение, вытесняя жидкость из камеры 25 через дроссель S в слив. Время возврата золотника в исходное положение определяется настройкой дросселя 8. Когда золотник 5 возвращается в среднее исходное положеиие, контрольная магистраль герметично перекрывается. При движении в другую сторону порщень упирается в щтангу и вытесняет л идкость из камеры 29 через трубопровод и каналы 22 Е 29 а камеру 25. При этом золотник смещается в другое крайнее ноложенпе. Втулка перекрывает и соединяет контрольную магистраль через редукционный клапан с магистралью давления.
На нульт уиравления поступает импульс, свидетельствующий о том, что контролируемый гидроцилиндр занял крайнее положение. После окончания передвижения, золотник снова возвращается пружиной 6 в исходное среднее положение, выдавливая жидкость через дроссель 9 в сливную магистраль. Время возврата золотника в исходное положение определяется настройкой дросселя 9. Утечки жидкости из камер 25 и 26 пополняются через обратные клананы 10 и //. После срабатывания датчика контрольная магистраль автоматически герметично перекрывается. При этом одна контрольная магистраль выдает на пульт управления импульсы давления, говорящие об окончании операции перемещения любого числа гидроцилиндра.
Предмет изобретения
Датчик контроля положения гидроцилиндров секций механизированных крепей, состоящий из воспринимающего элемента с рабочими магистралями и контрольной линией, и исполиительпого механизма в виде золотникового гидрораспределителя с двумя обособленными камерами, отличающийся тем, что, с целью обеспечения дистанционного контроля положения любого числа гидроцилиндров по одной контрольной линии, гидрораспределитель снабжеп редукционными клапанами, соединенными с контрольной линией, и выполнен с регулируемыми дросселями, расположенными между камерами распределителя и сливной магистралью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения поршня гидроцилиндра | 1981 |
|
SU962642A1 |
| Гидрораспределитель механизированной крепи | 1991 |
|
SU1834977A3 |
| Устройство для управления секцией гидрофицированной крепи | 1980 |
|
SU1102978A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| Система централизованного гидравлического или пневматического управления механизированной шахтной крепью | 1970 |
|
SU439614A1 |
| Гидропривод протяжного станка | 2021 |
|
RU2760012C1 |
| Гидросистема бурильной установки | 1980 |
|
SU907234A1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ПРОПОРЦИОНАЛЬНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УПРАВЛЕНИЕМ | 2001 |
|
RU2193701C1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320903C1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320902C2 |
30 29 2
Риг t
10 15 2J 7 S 24
(t
13 Уиг 2
