Предлагаемое приспособление к подъемникам для улавливания оборвавшихся концов грузовых канатов служит , для устранения удара (иногда сильного) на клеть, получающегося при падении оборвавшегося каната. Улавливание достигается при помощи расположенных на подъемнике двух пар захватных с волнистыми поверхностями щек, автоматически сближающихся при обрыве каната и таким образом захватываюш;их оборвавшийся конец пропущенного между ними грузового каната, Захватные щеки расположены на подвижной, подвешенной на противовесах, платформе по обеим сторонам там же установленного мотора. Крайние щеки неподвижно закреплены на платформе, а средние-сделаны подвижными, идущими на сближение с крайним под действием мотора после замыкания тока контактом, заделанным в тормозных колодках парашюта, при нажатии на последние тормозных щкивов дополнительным канатом, воспринимающим на себя нагрузку от клети при обрыве грузового каната.
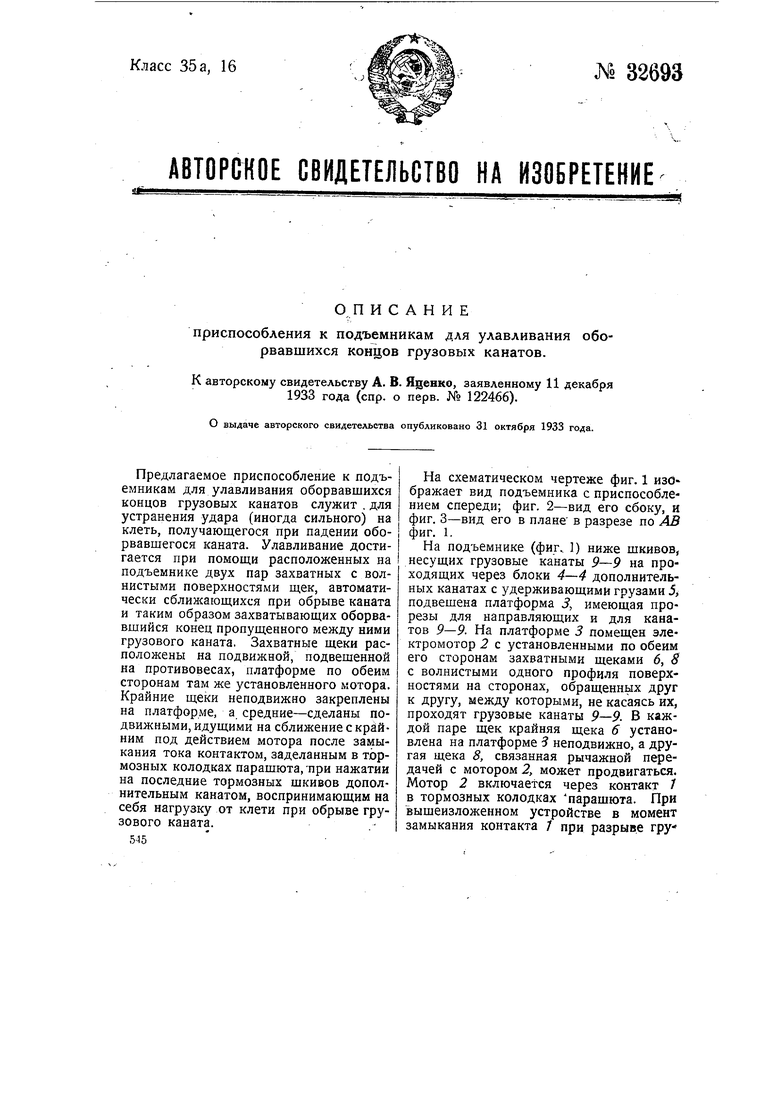
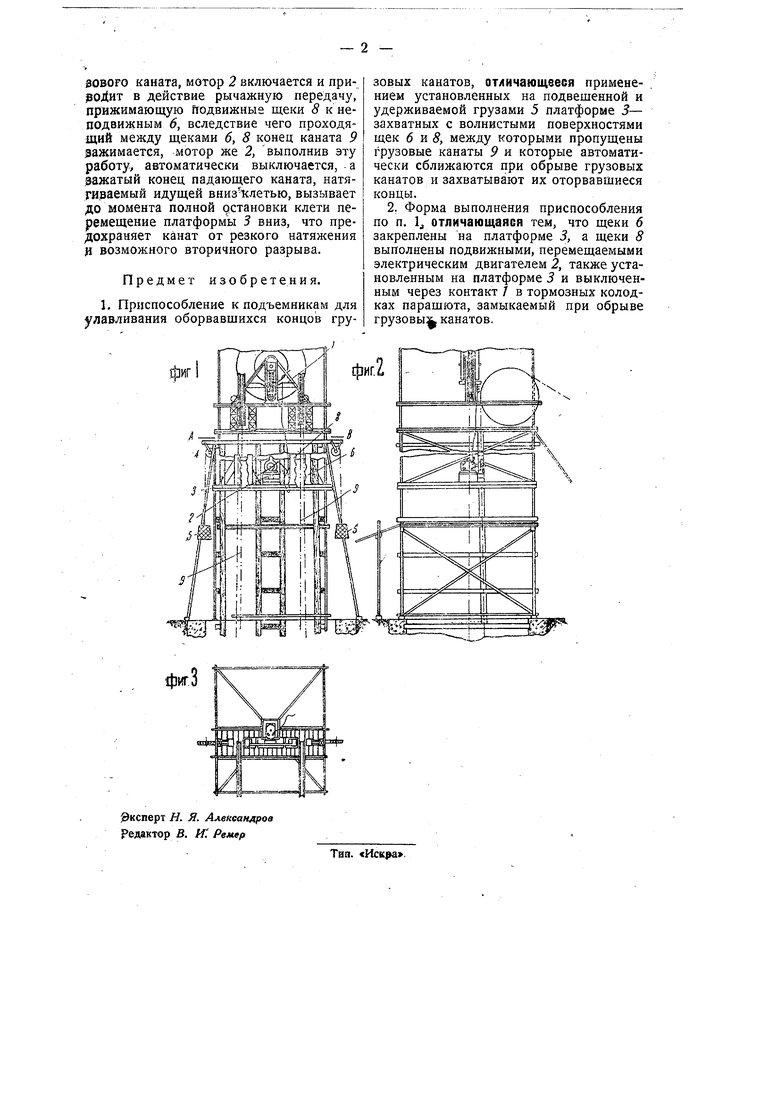
На схематическом чертеже фиг. 1 изображает вид подъемника с приспособлением спереди; фиг. 2-вид его сбоку, и фиг. 3-вид его в плане в разрезе по АВ фиг. 1.
На подъемнике (фиг, ) ниже шкивов, несущих грузовые канаты 9-Р на проходящих через блоки 4-4 дополнительных канатах с удерживающими грузами 5 подвешена платформа 3, имеющая прорезы для направляющих и для канатов 9-9. На платформе 3 помещен электромотор 2 с установленными по обеим его сторонам захватными щеками б, 8 с волнистыми одного профиля поверхностями на сторонах, обращенных друг к другу, между которыми, не касаясь их, проходят грузовые канаты 9-9. В каждой паре щек крайняя щека б установлена на платформе 3 неподвижно, а другая щека 8, связанная рычажной передачей с мотором 2, может продвигаться. Мотор 2 включается через контакт / в тормозных колодках парашюта. При вышеизложенном устройстве в момент замыкания контакта 7 при разрыве гру