Известны транспортеры, состоящие из платформ, шарнирно прикрепленных своей осью к цепям и опирающихся своими роликами (катками) на рельсовые пути. При переходе с верхней ветви транспортера на нижнюю и обратно платформы перемещаются параллельно самим себе. В предлагаемом транспортере для перемещения платформ их оси подхватываются при захвате на рычагах, синхронно вращающихся вместе с концевыми барабанами транспортера. Шарнирное сочленение захватов с рычагами дает возможность последним проходить под платформой, перекатывающейся по прямолинейному участку транспортерной ветви.
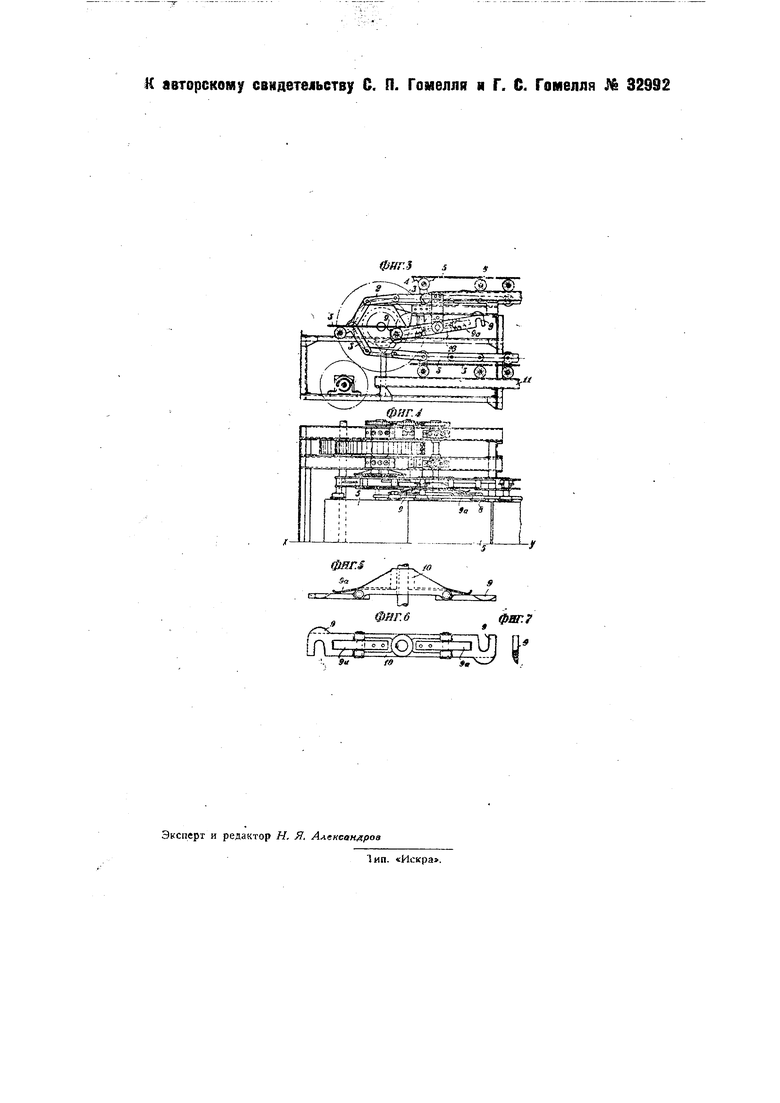
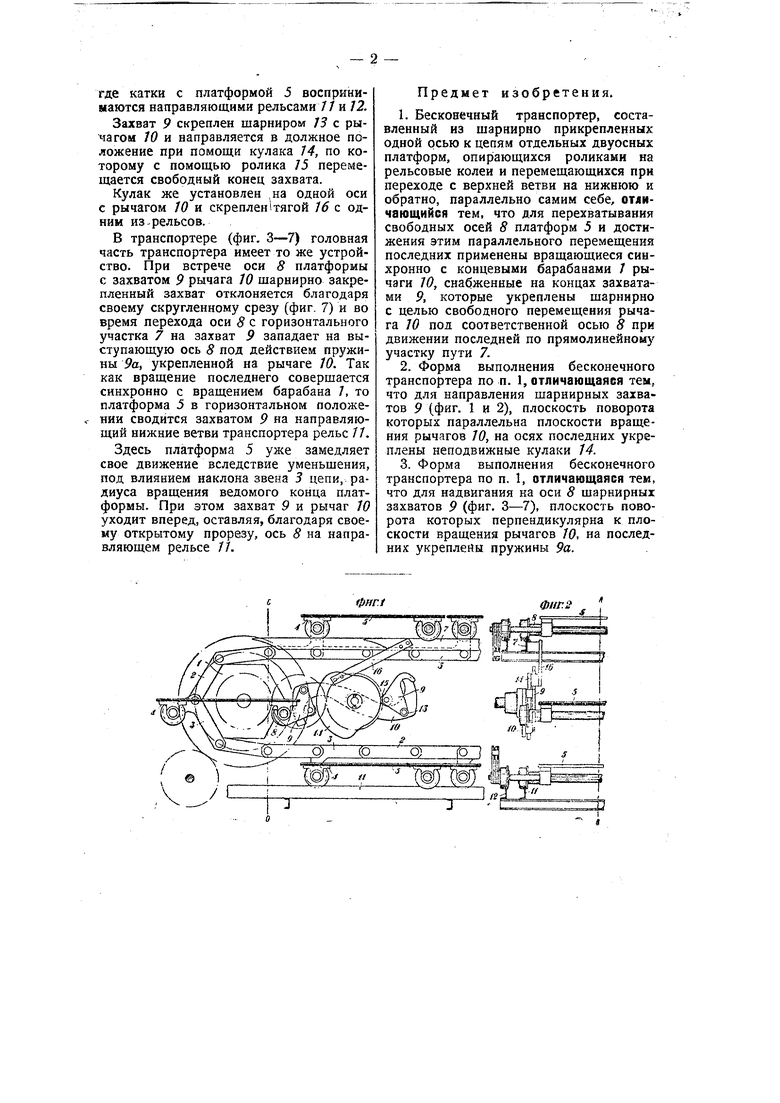
На чертеже фиг. 1 изображает разрез по АВ на фиг. 2 головной части транспортера; фиг. 2-разрез его по CD на фиг. 1; фиг. 3-разрез по ХУ на фиг. 4 измененной головной части транспортера; фиг. 4-вид части его сверху; фиг. 5 и 6-вид рычага в двух проекциях и фиг. 7-разрез захвата.
В существующих транспортерах, применяющихся, главным образом, для перемещения опок в целях формовки и
63t
разливки металла, происходит взаимное набегание платформ при их передвижении в головной части с верхней ветви на нижнюю, вследствие чего уменьщается полезный объем над платформами для установки опок.
В предлагаемом транспортере движение платформ в головной части барабана совершается по окружности большего диаметра, пгм окружность шарниров цепи, вследствие чего платформы, подходящие к головной части барабана, быстро уходят вперед от платформ, идущих за ними и, таким образом, устраняется их взаимное набегание.
Концевой граненый барабан (фиг. 1-2) ведет цепь, состоящую из обычных звеньев 2 и ведущих звеньев 3 с выступами, на которых укрепляется при помощи подшипников 4 ведомый конец платформы 5. Ее задний конец, сойдя с направляющего прямолинейного участка пути 7, попадает своей осью 8 во впадину захвата 9, укрепленного на рычаге 10, вращающемся синхронно с барабаном 7. При помощи захвата 9 платформа 5 в горизонтальном положении сводится на нижнюю ветвь транспортера,
где катки с платформой 5 воспринимаются направляющими рельсами7/ и 72.
Захват 9 скреплен шарниром 73 с рычагом JO и направляется в должное положение при помощи кулака 74, по которому с помощью ролика 75 перемещается свободный конец захвата.
Кулак же установлен ,на одной оси с рычагом 70 и скреплен тягой 76 с одним из-рельсов.
В транспортере (фиг. 3-7) головная часть транспортера имеет то же устройство. При встрече оси 8 платформы с захватом 9 рычага 70 шарнирно закрепленный захват отклоняется благодаря своему скругленному срезу (фиг, 7) и во время перехода оси 8 с горизонтального участка 7 на захват 9 западает на выступающую ось 8 под действием пружины Ра, укрепленной на рычаге 70. Так как вращение последнего совершается синхронно с вращением барабана 7, то платформа 5 в горизонтальном положении сводится захватом Р на направляющий нижние ветви транспортера рельс /7.
Здесь платформа 5 уже замедляет свое движение вследствие уменьшения, под влиянием наклона звена 3 цепи,, радиуса вращения ведомого конца платформы. При этом захват 9 и рычаг 70 уходит вперед, оставляя, благодаря своему открытому прорезу, ось 8 на направляющем рельсе 77,
2
Предмет изобретения.
1.Бесконечный транспортер, составленный из шарнирно прикрепленных одной осью к цепям отдельных двуосных платформ, опирающихся роликами на рельсовые колеи и перемещающихся при переходе с верхней ветви на нижнюю и обратно, параллельно самим себе, отличающийся тем, что для перехватывания свободных осей 8 платформ 5 и достижения этим параллельного перемещения последних применены вращающиеся синхронно с концевыми барабанами / рычаги 70, снабженные на концах захватами Р, которые укреплены шарнирно с целью свободного перемещения рычага 70 под соответственной осью 8 при движении последней по прямолинейному участку пути 7.
2.Форма выполнения бесконечного Транспортера по п. 1, отличающаяся тем, что для направления шарнирных захватов Р (фиг. 1 и 2), плоскость поворота которых параллельна плоскости вращения рычагов 70, на осях последних укреплены неподвижные кулаки 74.
3.Форма выполнения бесконечного транспортера по п. 1, отличающаяся тем, что для надвигания на оси 8 шарнирных захватов Р (фиг. 3-7), плоскость поворота которых перпендикулярна к плоскости вращения рычагов 70, на последних укреплены пружины Ра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Железнодорожный вагонный буфер | 1929 |
|
SU35876A1 |
| Транспортер | 1926 |
|
SU5134A1 |
| Переключающее и замковое устройство к винтовому телескопическому домкрату | 1935 |
|
SU47063A1 |
| Ограничитель грузового момента поворотного крана с тележкой, перемещающейся по стреле крана | 1950 |
|
SU92455A1 |
| Кабельный строительный кран | 1955 |
|
SU107146A1 |
| Автоматическое приспособление для выталкивания болванок из изложниц | 1929 |
|
SU17635A1 |
| УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ ПИТЬЕВОЙ СОЛОМИНКИ НА УПАКОВКЕ | 1989 |
|
RU2046738C1 |
| Прибор для съемки с натуры поперечных профилей земляного полотна | 1929 |
|
SU13659A1 |
| Двухколодочный тормоз с пружинным замыканием | 1955 |
|
SU116522A1 |
| Автоматический станок для изготовления фарфоровых изоляторов | 1930 |
|
SU27914A1 |