Изобретение относится к моделям для исследования и определения усилий в транспортных сооружениях, например в мостах, и может быть применено для моделирования. силового режима различных конструкционных и транспортных сооружений при воздействии на них движущейся неравномерно распределенной нагрузки.
Известные способы и устройства для моделирования усилий в транспортных сооружениях основаны на построении механических моделей сооружений и определении усилий в элементах модели при помощи измерителей усилия, например тензодатчиков.
Цель изобретения - обеспечение автоматического моделирования силового режима сооружения при действии движущейся неравномерно распределенной нагрузки и определение обобщенного показателя, отражающего силовой режим сооружения.
Это достигается тем, что измеритель усилия встроен в конструкцию, воспринимающую текущее значение движущейся нагрузки до ее входа на контролируемый участок сооружения, и через аналого-цифровой преобразователь связан с последовательной цепью запоминающих ячеек, управляемых датчиком перемещения движущейся нагрузки и соединенных с ключами, которые коммутируют электрическую цепь формирования выходного сигнала,
образованную калиброванными резисторами, подсоединенными к выходу модели и источнику питания. При этом цепь формирования выходного сигнала выполнена в виде параллельно соединенных через ключи весовых резисторов, подключенных через резистор суммирования к источнику стабилизированного напряжения, а источник стабилизированного напряжения - в виде компенсационного стабилизатора, цепь обратной которого подключена к параллельно соединенным через ключи Becfoвым резисторам. Весовые резисторы выполнены изменяющимися в зависимости от номера запоминающей ячейки в соответствии с видом эпюры распределения напрял ения вдоль сооружения.
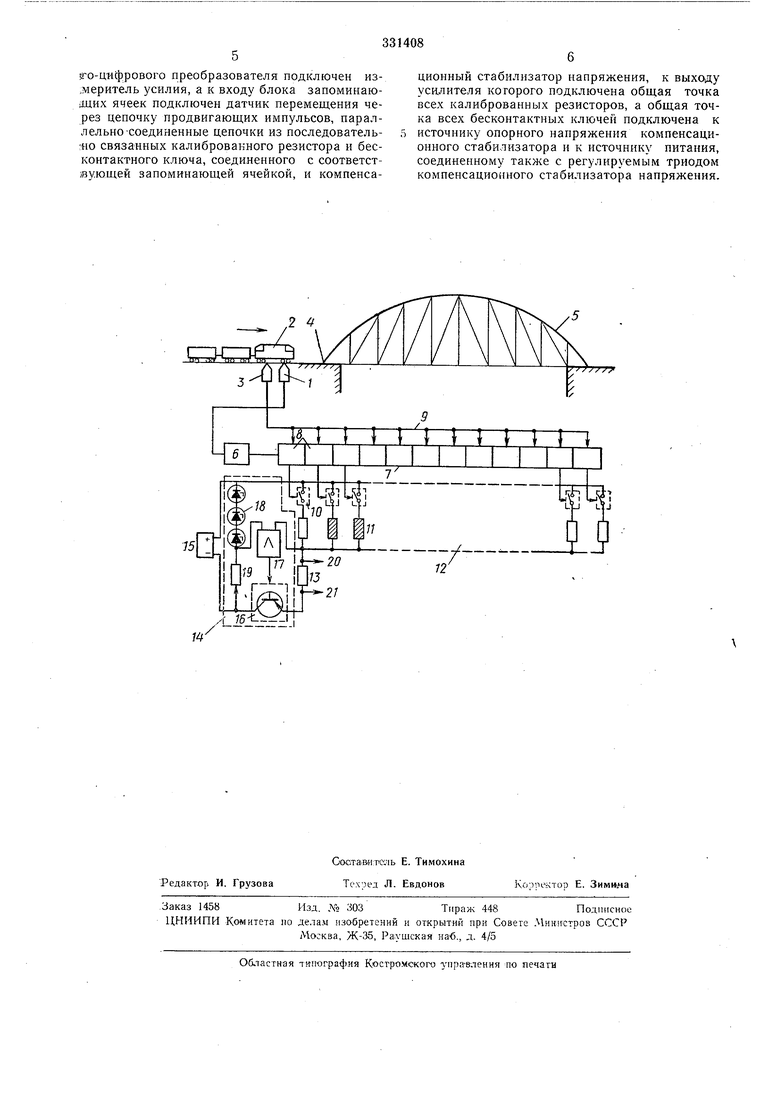
На чертеже показана схема модели.
Измеритель / усилия, создаваемого движущейся нагрузкой 2, например железнодорожным составом, на единицу длины транспортной линии, и датчик 5 перемещения нагрузки установлены перед входом 4 последней на транспортное сооружение 5, например мост. Выход измерителя / усилия через аналого-цифровой преобразователь 6 соединен с последовательной цепью блока 7 запоминающих ячеек 8, например с последовательным регистром. Выход датчика 3 перемещения нагрз/зки, выполненного частотным, присоединен к цепи 9 продвигающих импульсов запоминающих ячеек 8.
Выходы каждой из ячеек 8 соединены с нормально замкнутыми бесконтактными ключами 10, включенными последовательно с калиброванными резисторами 11. День 12 формирования выходного сигнала модели, состоящая из параллельно соединенных калиброванных резисторов 11 и суммирующего резистора 13, подключена к выходу компенсационного стабилизатора 14 напряжения, соединенного с источником 15 питания. Резисторы 11 подключаются к цепи 12 формирования выходного сигналачерез нормально замкнутые бесконтактные ключи 10, цени управления которых соединены с выходом каждой из запоминающих ячеек 8. Стабилизатор 14 напряжения включает в себя регулирующий триод 16, усилитель 17, источник 18 опорного напряжения, выполненный, например, на нолунроводни овых стабилитронах с токозадающим резистором 19, при этом цепь обратной связи стабилизатора 14 подсоединена к нараллельно подключенным резисторам 11. Электрический выходной сигнал модели (клеммы.20-21) снимается с резистора 13.
Устройство работает следующим образом.
При движении нагрузки 2 текущее (мгновенное) значение погонной нагрузки при помощи измерителя 1 усилия, вызываемого весом пагрузки, и аналого-цифрового преобразователя 6 представляется в форме частотно-модулированного импульсного сигнала.
При поступлении на вход блока 7 указанной последовательности импульсов, частота котог рых отражает текущее значение ногонной нагрузки в месте установки измерителя / усилия, каждый имнульс записывается в первой запоминающей ячейке 8 и последовательно переносится в носледуюн,ие запоминающие ячейки со скоростью продвигающих импульсов, поступающих по цепи 9 от частотного датчика 3 перемещения нагрузки.
Таким образом, скорость продвижения импульсов в блоке 7 пропорциональна скорости, с которой будет перемещаться нагрузка в процессе ее последующего движения по транспортному сооружению, например железнодорожному мосту, а плотность носледователыюсти записанных в запоминающих ячейках 8 блока 7 имнульсО;В характеризует последующее распределение интенсивности нагрузки па рассматриваемой длине моста в каждый данный момент времени. Следовательно, блок 7 в предлагаемом устройстве с упреждением во времени моделирует последующий процесс прохождения нагрузки через транспортное сооружение, причем каждая, запоминающая ячейка 8 во всей последовательной ценн их имитирует элементарный участок длины сооружения, а каждый импульс, записанный в ячейке, соответствует единице веса нагрузки, нриложенной к соответствующему элементарному участку длины сооружения.
го сигнала модели, который характеризует силовой режим соорул ения и может возникнуть при воздействии на сооружение движущейся нагрузки, электрическое состояние запоминаюЩих ячеек 8 блока 7 нреобразуется в соответствующее положение ключей 10 (при записи импульса в ячейке 8 соответствующий ей ключ 10 находится в замкнутом положеиии, подключая резистор 11 к цепи обратной связи
стабилизатора /4).,
При этом стабилизатор 14 напряжения путем сравнения иа входе усилителя 17 напряжений источника 18 опорного напряжения н обратной связи и последующего воздействия на
регулирующий триод 16 автоматически изменяет свое выходное напряжение до такой величины, которая обеспечивает постоянное напряжение цепи обратной связи независимо от числа подключенных к ней резисторов 11 и величины их сопротивлений Отсюда следует, что ток, протекающий через суммирующий резистор 13, включенный последовательно с нараллельно включенными резисторами 11, и пропорциональный величине выходного сигнала
модели, определяется числом включенных резисторов 11 и величиной их сойротивления.
При известной зависимости величины изгибающего момента, возникающего, например, относительно оноры моста, благодаря дейстВИЮ единицы веса нагрузки, от места приложения указанной единичной нагрузки и при выполнении величин резисторов 11 в зависимости от номера запоминающей ячейки 8 величина выходного сигнала модели (клеммы 20-
21) пропорциональна величине суммарного изгибающего момента, возникающего относительно оноры сооружения под действием нагрузки при ее прохождении по сооружепию. Аналогичным образом могут быть определены иапряжеиия в различных участках конструкции сооружения.
Таким образом, предложенная модель формирует (с упреждением) в электрической форме обобщенный показатель, характеризующий
силовой режнм транспортного сооружения, который возникает при воздействии на него движущейся неравномерно распределенной на.грЯЗКИ. Обобщенный показатель может быть использован для заблаговременной защиты сооружения от недопустимых превышений оптимального силового режима конструкций сооружения.
Предмет и з о б р е т е н и я
Устройство для моделирования усилий в транспортных сооружениях, содержащее измеритель усилия и датчик неремеп1ения, соеди} енные с движущейся нагрузкой, и источник питания, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит аналого-цифровой преобразователь и последовательно соединенный с ним блок запоминающих ячеек, цепочку продвигающих импульсов, причем к входу ана-лого-цифрового преобразователя подключен из.меритель усилия, а к входу блока запоминаюших ячеек подключен датчик перемещения через цепочку продвигающих импульсов, параллельно-соединенные цепочки из последовательно связанных калиброванного резистора и бесконтактного ключа, соединенного с соответствующей запоминающей ячейкой, и компенсационный стабилизатор напряжения, к выходу усклителя когорого подключена общая точка всех калиброванных резисторов, а общая точка всех бесконтактных ключей подключена к источнику опорного напряжения компенсационного стабилизатора и к источнику питания, соединенному также с регулируемым триодом компенсационного стабилизатора напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОПРОКИДЫВАЮЩЕГО МОМЕНТА, ДЕЙСТВУЮЩЕГО НА КОНСОЛЬ | 1973 |
|
SU375501A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПЕРЕМЕЩЕНИЯ ВЕЩЕСТВА В ДВИЖУЩЕЙСЯ СРЕДЕ | 1973 |
|
SU407347A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАГРУЗКИ СТРЕЛЫ ОТВАЛООБРАЗОВАТЕЛЯ ПОРОДОЙ | 1973 |
|
SU386098A1 |
| СТАБИЛИЗАТОР ПОСТОЯННОГО РЕГУЛИРУЕМОГО ТОКА | 1991 |
|
RU2010305C1 |
| УСТРОЙСТВО для ПРЕДОХРАНЕНИЯ МЕТАЛЛОКОНСТРУКЦИИ | 1973 |
|
SU379745A1 |
| СТАБИЛИЗАТОР ПОСТОЯННОГО РЕГУЛИРУЕМОГО ТОКА | 1991 |
|
RU2010304C1 |
| ВСЕСОЮЗНАЯ 'mmm^j^mrirmu | 1973 |
|
SU374549A1 |
| Стабилизатор напряжения | 1988 |
|
SU1561069A1 |
| Устройство для дифференцированного учета материала,перемещаемого конвейерной линией | 1971 |
|
SU450208A1 |
| Устройство для регистрации @ временных интервалов | 1981 |
|
SU1022109A1 |
r iUiUi
/---72
