1
Изобретение относится к тредохранительным устройствам и узлам сигнализации и управления экскаваторов, отвалообразователей и тому подобных машин.
Известно устройство для (Предохранения металлоконструкции стрелы, например, отвалообразователей и роторных экскаваторов от перегрузки, включающее датчик погонной нагрузки, датчик контроля движения ленты ко-нвейера и пороговый элемент, встроенный в цепь аварийной остановки оборудования.
Цель изобретения - предотвращение отключения экскаватора при кратковременных местных увеличениях погонной нагрузки.
Достигается это тем, что к выходу датчика погонной нагрузки непосредственно и через узел запаздывания подключены входы реверсивного интегратора, который соединен с пороговым элементом и индикатором.
При этом датчик погонной нагрузки может быть выполнен: с частотным .преобразователем, а узел запаздывания - в виде последовательного регистра, цепь продвигающих импульсов которого соединена с датчиком контроля движения ленты.
Кроме того, реверсивный интегратор можно кинематически соединить посредством дифференциала с пороговым элементом и индикатором.
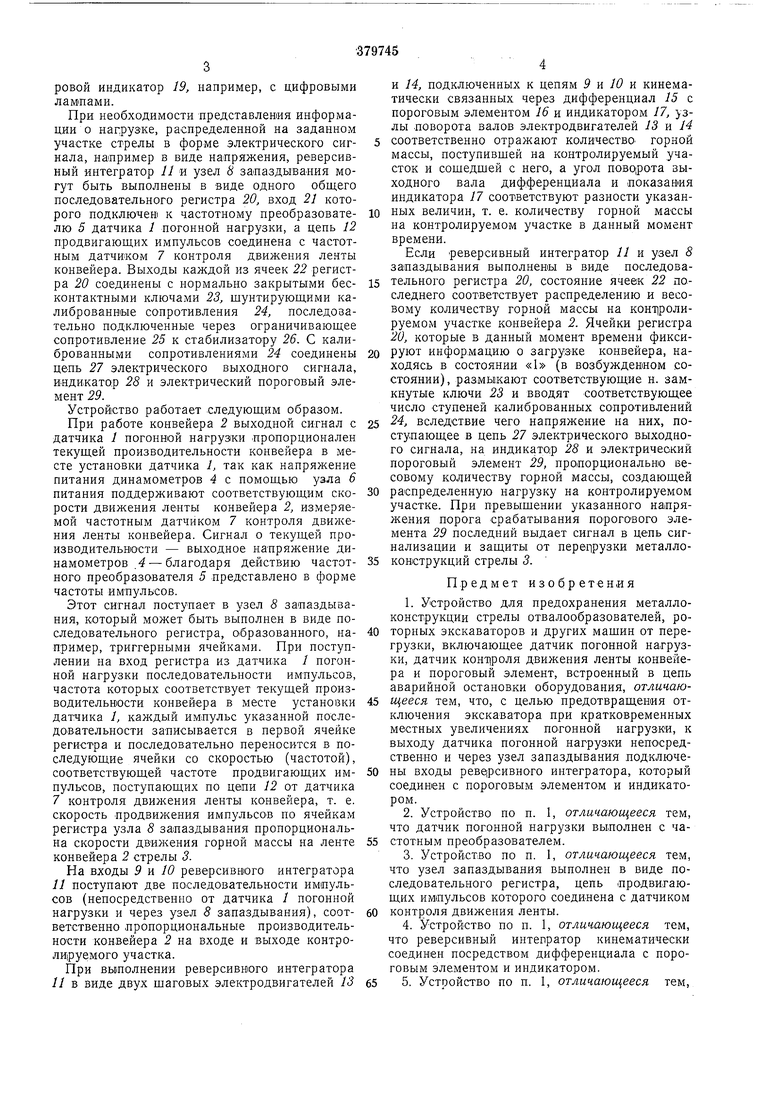
На фиг. 1 изображена схема устройства;
на фиг. 2 - схема реверсивного интегратора;
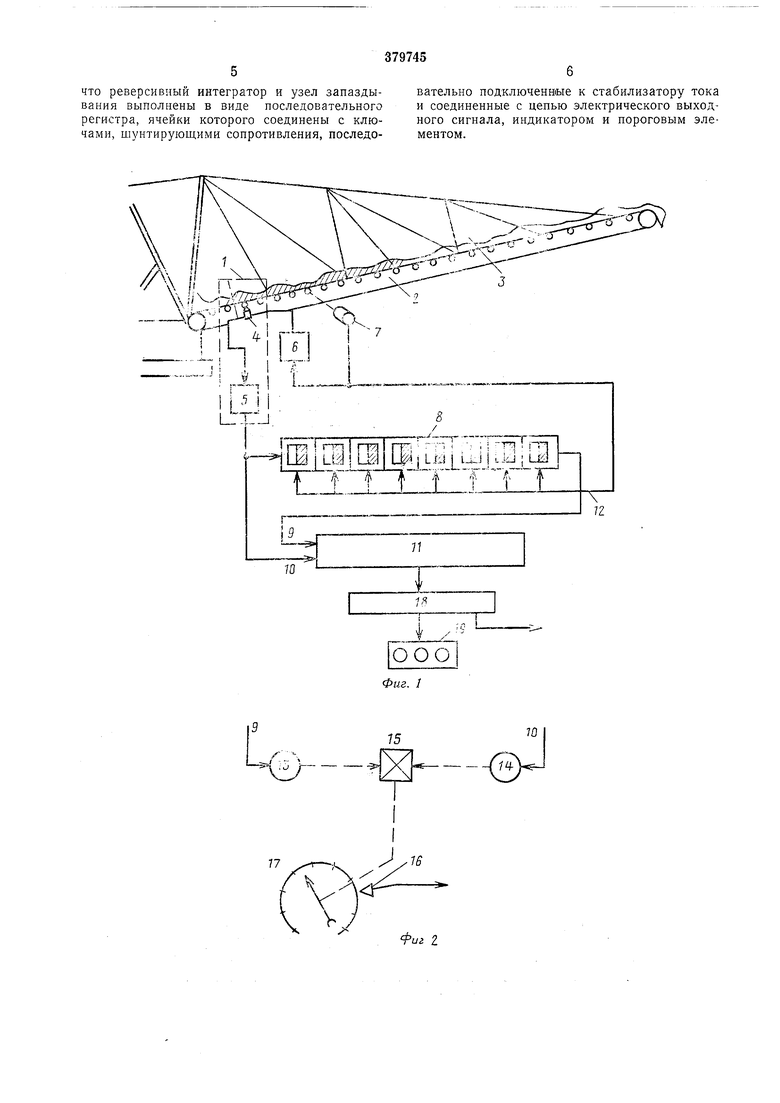
на фиг. 3 - схема реверсивного интегратора
и узла заоаздывания, выполненных в виде последовательного регистра.
Предлагаемое устройство включает датчик / погонной нагрузки, установленный на конвейере 2 стрелы 3 роторного экскаватора. Этот датчик содержит динамометры 4, выход
которых соединен с частотным преобразователем 5, а цепь питания через узел 6 питания- с датчиком 7 контроля движения ленты конвейера. К выходу датчика / погонной нагрузки непосредственно и через узел 8 залаздывания подключены входы 9 и 10 реверсивного интегратора //. Датчик 7 контроля и реверсивный интегратор П выполнены частотными, а узел запаздывания может быть выполнен в виде последовательного регистра,
цепь 12 продвигающих им пульсов которого соединена с датчиком 7 контроля движения ленты. Реверсивный интегратор // состоит из двух шаговых электродвигателей 13, 14, кинематически связанн1ых через дифференциал
5 с пороговым элементом 16 и индикатором 17. Возможно также применять в качестве реверсивного интегратора // электронные счетчики импульсов, в качестве порогового элемента-дешифратор 18, а в качестве иидикатора - соединенный с дешифратором цифровой индикатор 19, например, с цифровыми лампами.
При необходимости представления информации о нагрузке, распределенной на заданном участке стрелы в форме электрического сигнала, например в виде напряжения, реверсивный интегратор 11 и узел 8 запаздывания могут быть выполнены в виде одного общего последовательного регистра 20, вход 21 которого подключен к частотному преобразователю 5 датчика 1 погонной нагрузки, а цепь 12 продвигающих импульсов соединена с частотным датчиком 7 контроля движения ленты конвейера. Выходы каждой из ячеек 22 регистра 20 соединены с нормально закрытыми бесконтактными ключами 23, шунтирующими калиброванные сопротивления 24, последовательно подключенные через ограничивающее сопротивление 25 к стабилизатору 26. С калиброванными сопротивлениями 24 соединены цепь 27 электрического выходного сигнала, индикатор 28 и электрический пороговый элемент 29.
Устройство работает следующим образом.
При работе конвейера 2 выходной сигнал с датчика 1 погонной нагрузки -прооорционален текущей производительности конвейера в месте установки датчика 1, так как напряжение питания динамометров 4 с помощью узла 6 питания поддерживают соответствующим скорости движения ленты конвейера 2, измеряемой частотным датчиком 7 контроля движения ленты конвейера. Сигнал о текущей производительности - выходное напряжение динамометров .4-благодаря действию частотного преобразователя 5 представлено в форме частоты импульсов.
Этот сигнал поступает в узел 8 запаздывания, который может быть выполнен в виде последовательного регистра, о-бразованного, например, триггерными ячейками. При поступлении на вход регистра из датчика / погонной нагрузки последовательности импульсов, частота которых соответствует текущей производительности конвейера в месте установки датчика 1, каждый импульс указанной последовательности записывается в первой ячейке регистра и последовательно переносится в последующие ячейки со скоростью (частотой), соответствующей частоте продвигающих импульсов, поступающих по цепи 12 от датчика 7 контроля движения ленты конвейера, т. е. скорость продвижения импульсов по ячейкам регистра узла 8 запаздывания пропорциональна скорости движения горной массы на ленте конвейера 2 стрелы 3.
На входы 9 и 10 реверсивного интегратора 11 поступают две последовательности импульсов (непосредственно от датчика / погонной нагрузки и через узел 8 запаздывания), соответственно пропорциональные производительности конвейера 2 на входе и выходе контролируемого участка.
При выполнении реверсивного интегратора // в виде двух шаговых электродвигателей 13
и 14, подключенных к цепям 9 и 10 н кинематически связанных через дифференциал 15 с пороговым элементом 16 и индикатором 17, узлы поворота валов электродвигателей 13 и 14 соответственно отражают количество- горной массы, поступившей на контролируемый участок и сошедшей с него, а угол поворота выходного вала дифференциала и показания индикатора 17 соответствуют разности указанных величин, т. е. количеству горной массы на контролируемом участке в данный момент времени.
Если реверсивный интегратор 11 и узел 8 запаздывания выполнены в виде последовательного регистра 20, состояние ячее1К 22 последнего соответствует распределению и весовому количеству горной массы на кон11ролируемом участке конвейера 2. Ячейки регистра 20, которые в данный момент времени фиксируют информацию о загрузке конвейера, находясь в состоянии «1 (в возбужденном состоянии), размыкают соответствующие н. замкнутые ключи 23 и вводят соответствующее число ступеней калиброванных сопротивлений
24, вследствие чего напряжение на них, поступающее в цепь 27 электрического выходного сигнала, на индикатор 28 и электрический пороговый элемент 29, пропорционально весовому количеству горной массы, создающей
распределенную нагрузку на контролируемом участке. При превышении указанного напряжения порога срабатывания порогового элемента 29 последний выдает сигнал в цепь сигнализации и защиты от перег|рузки металлоконструкций стрелы 3.
Предмет изобретения
1.Устройство для предохранения металлоконструкции стрелы отвалообразователей, роторных экскаваторов и других мащин от перегрузки, включающее датчик погонной нагрузки, датчик конт1роля движения ленты конвейера и пороговый элемент, встроенный в цепь аварийной остановки оборудования, отличающееся тем, что, с целью предотвращения отключения экскаватора при кратковременных местных увеличениях по-гонной нагрузки, к выходу датчика погонной нагрузки непосредственно и через узел запаздывания подключены входы реве|рсивного интегратора, который соединен с пороговым элементом и индикатором.
2.Устройство по п. 1, отличающееся тем, что датчик погонной нагрузки выполнен с частотным преобразователем.
3.Устройство по п. 1, отличающееся тем, что узел запаздывания выполнен в виде последовательного регистра, цепь продвигающих импульсов которого соединена с датчиком
контроля движения ленты.
4.Устройство по п. 1, отличающееся тем, что реверсивный интегратор кинематически соединен посредством дифференциала с пороговым элементом и индикатором.
5. Устройство по п. 1, отличающееся тем.
что реверсивный интегратор и узел запаздывания выполнены в виде последовательного регистра, ячейки которого соединены с ключами, шунтирующими сопротивления, последо гтт i r-f-TJ гта ГР ; ; i П I L I Lia|IJ iLlii Ш j 4±
вательно подключенные к стабилизатору тока и соединенные с цепью электрического выходного сигнала, индикатором и пороговым элементом. . 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАГРУЗКИ СТРЕЛЫ ОТВАЛООБРАЗОВАТЕЛЯ ПОРОДОЙ | 1973 |
|
SU386098A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Устройство для управления конвейерной линией | 1979 |
|
SU876525A1 |
| Устройство для автоматизированного контроля силового режима металлоконструкций оборудования роторных комплексов | 1984 |
|
SU1159991A1 |
| Устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов | 1981 |
|
SU977622A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| Устройство для автоматизированного контроля силового режима металлоконструкций машин роторных комплексов | 1984 |
|
SU1209772A1 |
| Устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов | 1983 |
|
SU1145098A2 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ | 1971 |
|
SU310127A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
9
loob
Ю
(14Фиг г
7j 1 1 Г 71 Г 1
:: гЗ-лл;Ьл 1 д ;::1л з(л
П -ЗТ11ТГС.ЛТ. 25
- iDJjiaki3k k }kz3k H4i
24Е
25®
25
Фиг. 2
