Изобретение относится к области нелинейных систем автоматического управления и предназначено для улучшения качественных показателей динамических характеристик.
Известны псевдолинейные логические устройства, содержащие два фильтра, выход первого из которых через блок выделения модуля, а выход второго через блок сигнатуры соединены с соответсгвующими входами блока умножения, -выход которого соединен с первым входом сумматора.
Известные логические устройства позволяют осуществлять практически независимое формирование амплитудной и фазовой характеристик в широком диапазоне частот.
Для этого случая коэффициенты гармонической линеаризации таковы;
q - |U7A(/«))| |( + Ф - f) COS 6 +
+ Sin ср. cos (ср -f 0)1; q |М7А(/ш)| (- + + cpj sin t +
-fsin-f sjn(cf+ 1)1.
Амплитудная и фазовая характеристики независимы и определяются приближенно выражениями
|Г,(/со)|
|WA(/«) I 0,64+0,36 сое (ф+|1|)|)| фл(со) ф-0,4:2 sin2(ф+ IфI),
где I WA(/CO) I - модуль частотной передаточной функции, формирующей амплитудную характеристику;
г|) - запаздывание, вносимое линейным фильтром амплитудной ветви;
Ф - опережение, вносимое линейным фильтром фазовой ветви.
Применение псевдолинейных логических устройств для целей коррекции обеспечивает высокое качество управления свободным движением автоматических систем. Недостаток устройств этого типа проявляется при управлении вынужденным движением систем. Так, при наличии на входе псевдолинейного устройства постоянного или медленно меняющегося ВОвремени сигнала (вызванного внешним возмущением или задающим воздействием) динамические свойства системы управления являются не только функцией частоты входного сигнала, но и его амплитуды.
Это обстоятельство приводит к тому, что в системе возникают, как правило, устойчивые
худой и частотой, зависящими от вида и величины внешних воздействий.
Для исключения автоколебаний при управлении как свободным, так и вынужденным движением автоматических систем известное устройство дополнительно содержит блок разделения ъходиого ситнала, первый выход которого соединен со входами фильтров, а второй выход - со вторым вх-одом сумматора.
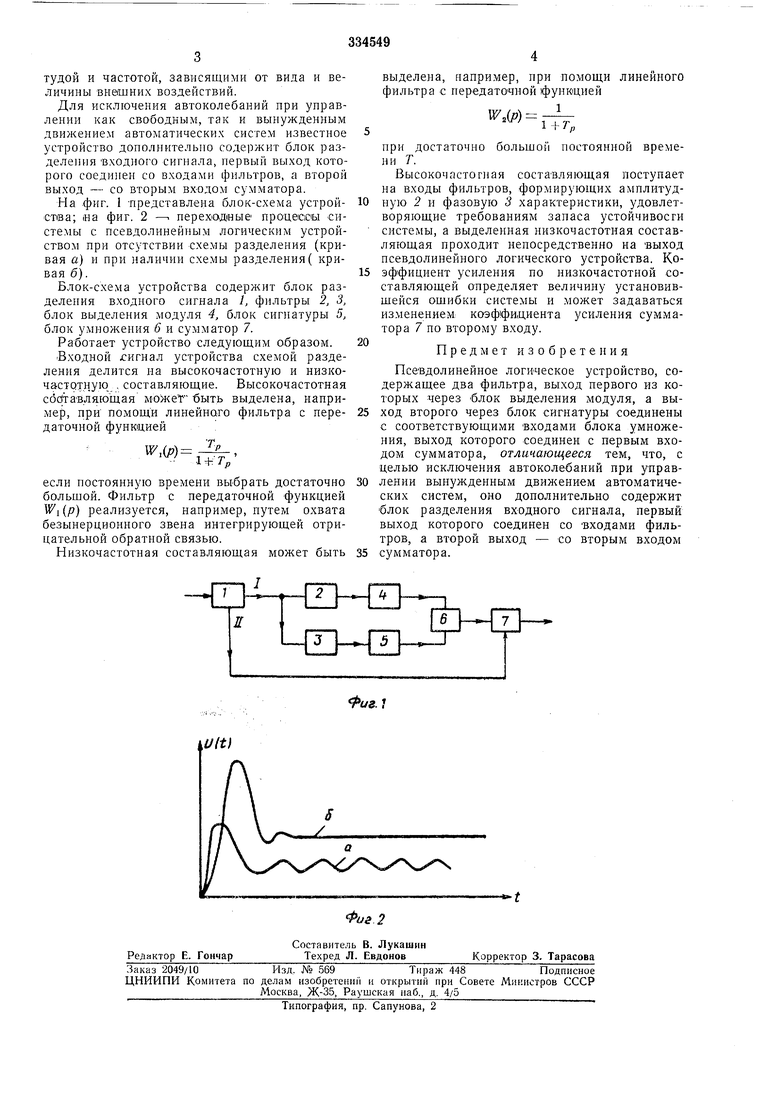
На фиг. 1 -представлена блок-схема устройства; иа фит. 2 -. переходиые процессы системы с псевдолинейным логическим устройством при отсутствии схемы разделения (кривая а) и при наличии схемы разделения ( кривая б).
Блок-схема устройства содержит блок разделения входного сигнала 1, фильтры 2, 3, блок выделения модуля 4, блок сигнатуры 5, блок умножения 6 и сумматор 7.
Работает устройство следующим образом.
-Входной х:игнал устройства схемой разделения делится на высокочастотную и низкочастотн.ую . составляющие. Высокочастотная сбс тавляющая можеТ быть выделена, например, при помощи линейного фильтра с передаточной функцией
«,(.
если постоянную времени выбрать достаточно большой. Фильтр с передаточной функцией WI(P} реализуется, налример, путем охвата безынерционного звена интегрирующей отрицательной обратной связью. Низкочастотная составляющая может быть
выделена, например, при помощи линейного фильтра с передаточной функцией
W(p) - 1 + Тр
при достаточно большой постоянной времен и Т,
Высокочастотная составляющая поступает на входы фильтров, формирующих амплитудную 2 и фазовую 3 характеристики, удовлетворяющие требованиям запаса устойчивости системы, а выделенная низкочастотная составляющая проходит непосредственно на выход псевдолинейного логического устройства. Коэффициент усиления по низкочастотной составляющей определяет величину установившейся ошибки системы и может задаваться изменением: коэффициента усиления сумматора 7 но второму входу.
Предмет изобретения
Псевдолинейное логическое устройство, содержащее два фильтра, выход первого из которых через блок выделения модуля, а выход второго через блок сигнатуры соединены с соответствующими входами блока умножения, выход которого соединен с первым входом сумматора, отличающееся тем, что, с целью исключения автоколебаний при управлении вынужденным движением автоматических систем, оно дополнительно содерл ит блок разделения входного сигнала, первый выход которого соединен со входами фильтров, а второй выход - со вторым входом
сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Способ фазовой компенсации в механизмах управления транспортными средствами и устройство для его реализации | 2020 |
|
RU2775856C2 |
| Псевдолинейное корректирующее устройство для систем управления | 1982 |
|
SU1076870A1 |
| ПСЕВДОЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU387332A1 |
| Устройство для фильтрации высокочастотных отклонений натяжения полосы на прокатном стане | 1981 |
|
SU973204A1 |
| Псевдолинейное корректирующее устройство | 1975 |
|
SU708298A1 |
| Псевдолинейное корректирующее устройство | 1979 |
|
SU851332A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| Псевдолинейное корректирующее устройство | 1978 |
|
SU748340A1 |
| Самонастраивающаяся следящая система | 1988 |
|
SU1644089A1 |
