Изобретение относится к области автоматического регулирования и предназначено для улучшения качества систем автоматического регулирования. Оно может быть использовано в системе автоматического управления транспортным средством, в том числе в системе управления летательным аппаратом, где может возникать отрицательный фазовый сдвиг между входным и выходным сигналами, приводящий к возникновению колебаний и потере устойчивости всей системы.
Известно, что в пилотируемых системах управления летательным аппаратом частота входного сигнала лежит в диапазоне от 0.1 рад/с до 20 рад/с [1].
Известно, что в пилотируемых системах управления летательным аппаратом сигнал может подаваться непреднамеренно с недопустимо большой амплитудой [1].
Известны нелинейные корректирующие устройства с раздельными каналами для формирования амплитудных и фазовых характеристик.
Известны корректирующие устройства, содержащие линейные фильтры, блок сигнатуры, блок взятия модуля и блок умножения [2].
Наиболее близким, принятым за прототип, является нелинейное корректирующее устройство [3] для предотвращения или демпфирования колебаний, в котором входное напряжение через первый линейный фильтр поступает на один из входов блока умножения и через второй блок взятия модуля подается на элемент сравнения с положительной полярностью. Одновременно входное напряжение поступает на второй линейный фильтр. Выходное напряжение второго линейного фильтра через первый блок взятия модуля подается с отрицательной полярностью на второй вход элемента сравнения, выход которого соединен со входом блока сигнатуры. Выход блока сигнатуры подключен ко второму входу блока умножения.
Недостатками данного прототипа являются незначительный корректирующий эффект и небольшой фазовый сдвиг, вносимый устройством, максимальное значение которого не превышает 45 градусов. Также недостатками прототипа является то, что устройство прототипа применимо для ограниченного диапазона частот входного сигнала, а именно не пропускает сигналы высокой частоты. Еще одним недостатком устройства прототипа является то, что устройство пропускает сигналы любой амплитуды. Последние два недостатка имеют место для систем, где частота входного сигнала лежит в широких пределах и есть ограничение на величину его амплитуды, например, в пилотируемых системах управления летательными аппаратами.
Задачей изобретения является предотвращение колебаний и повышение корректирующего эффекта, состоящего во внесении в управляющий сигнал положительного фазового сдвига. Также задачей изобретения расширение области устойчивости и возможностей системы управления, за счет расширения диапазона частот входного сигнала и ограничения недопустимого значения амплитуды входного сигнала.
Поставленные задачи относительно способа решаются за счет того, что способ фазовой компенсации в механизмах управления транспортными средствами, так же как в прототипе, заключается в том, что входной сигнал поступает на вход блока взятия модуля, одновременно входной сигнал поступает на вход второго линейного фильтра, выходной сигнал блока сигнатуры поступает на один из входов блока умножения, выход которого является выходом устройства, отличающийся тем, что входной сигнал поступает на вход блока взятия модуля через блок логического сравнения, выход которого подают на второй вход блока умножения, сигнал на выходе второго линейного фильтра поступает на один из входов сумматора, одновременно входной сигнал поступает через третий линейный фильтр на второй вход сумматора, сигнал на выходе которого через блок дифференцирования поступает на вход блока сигнатуры.
Поставленные задачи относительно устройства решаются за счет того, что вход устройства фазовой компенсации в механизмах управления транспортными средствами, так же как в прототипе, подключен ко второму линейному фильтру, выход блока сигнатуры подключен к одному из входов блока умножения, выход которого является выходом устройства, отличающееся тем, что вход устройства подключен ко входу блока взятия модуля через блок логического сравнения, выход которого подключен к одному из входов блока умножения, выход второго линейного фильтра подключен к одному из входов сумматора, вход устройства подключен к третьему линейному фильтру, выход которого подключен ко второму входу сумматора, выход которого через блок дифференцирования подключен ко входу блока сигнатуры.
Технический результат достигается за счет того, что выход сумматора подключен ко входу блока дифференцирования, выход которого подключен ко входу блока сигнатуры. Блок дифференцирования позволяет произвести смену знака сигнала на выходе устройства относительно сигнала на его входе, и тем самым получить опережение фазы выходного сигнала на 180 градусов относительно входного сигнала.
Также технический результат достигается за счет того, что входной сигнал одновременно подают на второй и третий линейный фильтр, выходы которых соединены со входом сумматора. Второй линейный фильтр является форсирующим звеном и иметь передаточную функцию вида:
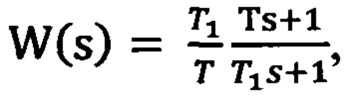
s - оператор Лапласа, s=jω, где ω - частота,
T, T1 - постоянные времени фильтра, которые выбираются так, чтобы фильтр обеспечивал максимальный запас по фазе и T>T1.
Третий линейный фильтр должен быть высокочастотным с передаточной функцией вида:
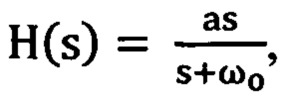
где s - оператор Лапласа,
а>0 - коэффициент передаточной функции фильтра, определяющий уровень амплитудно-частотной характеристики,
ω - частота среза.
Также технический результат достигается за счет того, что величина амплитуды входного сигнала сравнивается с установленной максимально допустимой величиной амплитуды в блоке логического сравнения, и если величина амплитуды входного сигнала превышает величину установленной амплитуды, то она принимается равной установленной, иначе сигнал проходит без изменений.
Сущность заявленного изобретения поясняется на Фиг. 1-7.
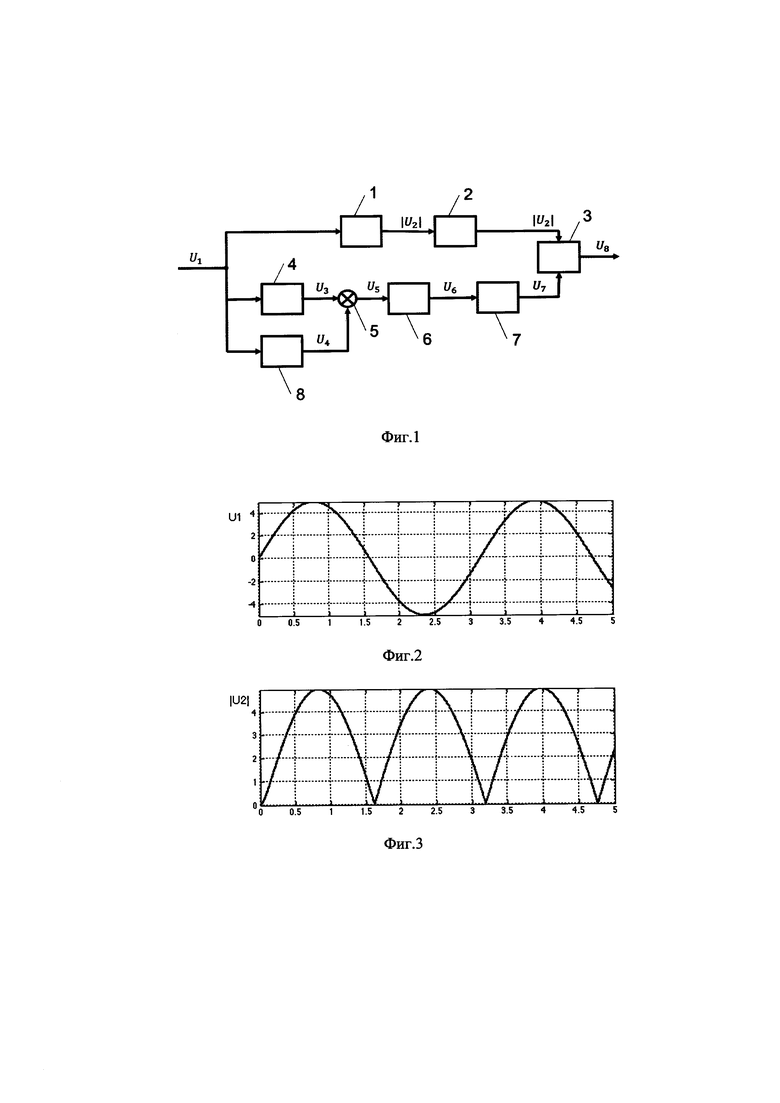
На Фиг. 1 представлена блок-схема устройства для реализации способа фазовой компенсации в механизмах управления транспортными средствами.
Устройство фазовой компенсации в механизмах управления транспортными средствами содержит блок взятия модуля (1), вход которого является входом устройства, выход блока взятия модуля соединен со входом блока логического сравнения (2), выход которого соединен с одним из входов блока умножения (3). Также входом устройства является вход второго линейного фильтра (4), выход которого соединен с одним из входов блока сумматора (5). Также входом устройства является вход третьего линейного фильтра (8), выход которого соединен со вторым входом блока сумматора (5), выход которого соединен со входом блока дифференцирования (6), выход которого соединен со входом блока сигнатуры (7), выход которого соединен с вторым входом блока умножения (3), выход которого является выходом устройства.
Блок дифференцирования, сумматор, блок взятия модуля могут быть реализованы на базе операционных усилителей ОР 27. Второй и третий линейные фильтры могут быть реализованы на пассивных RC-элементах. Блок сигнатуры и логического сравнения могут быть реализован с помощью интегральной микросхемы компаратора КР554СА3. Блок умножения может быть реализован с помощью интегральной микросхемы перемножителя КР525ПС2.
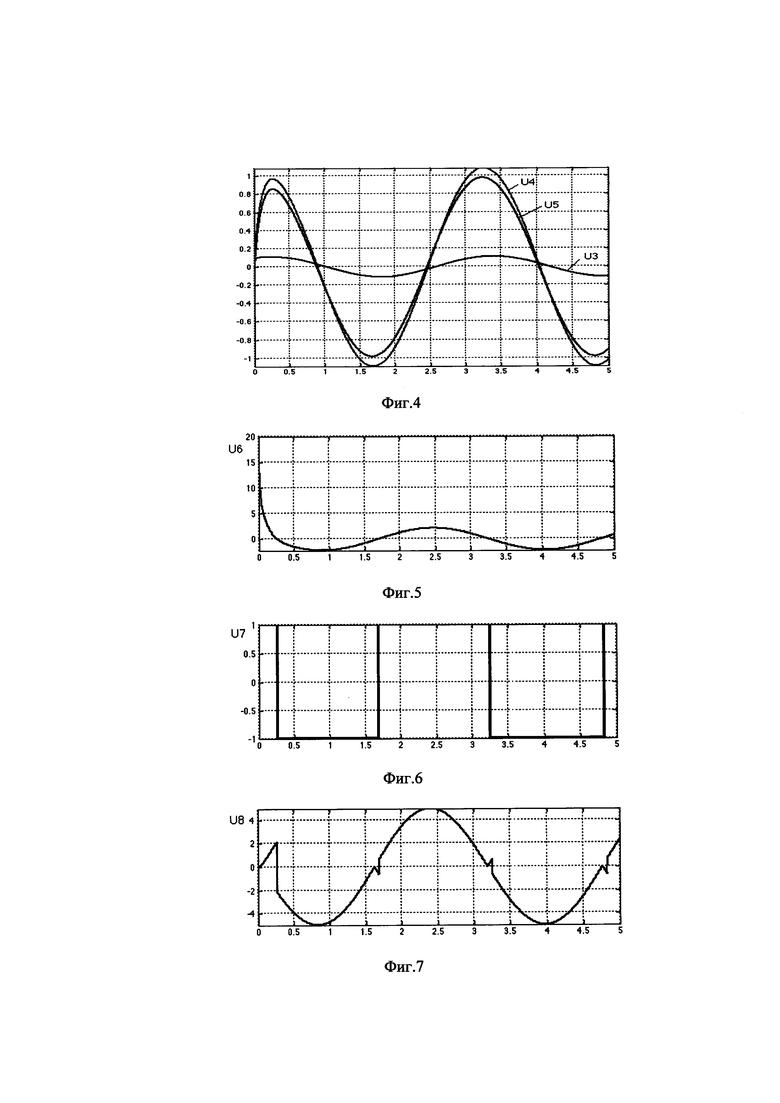
На Фиг. 2-7 представлены временные диаграммы работы устройства фазовой компенсации в механизмах управления транспортными средствами при подаче на его вход гармонического синусоидального сигнала частотой 2 рад/с и амплитудой равной 5.
Работа устройства фазовой компенсации в механизмах управления транспортными средствами происходит следующим образом. При подаче на вход устройства гармонического синусоидального сигнала U1 (Фиг. 2) он проходит через блок взятия модуля 1, в котором инвертируются отрицательные полуволны (Фиг. 3). После чего сигнал на выходе блока взятия модуля |U2| попадает на вход блока логического сравнения 2, где величина амплитуды сигнала |U2| сравнивается с величиной заданной амплитудой, и если величина амплитуды сигнала |U2| не превышает величину заданной амплитуды, то сигнал |U2| проходит без изменений на один из входов блока умножения 3, иначе величина амплитуды приравнивается заданной и полученный сигнал с заданной амплитудой подается на один из входов блока умножения 3. При подаче на вход устройства гармонического синусоидального сигнала U1 (Фиг. 2) он проходит через второй линейный фильтр 4 и третий линейный фильтр 5. Сигнал U3 на выходе второго линейного фильтра 4 опережает по фазе сигнал U4 на выходе третьего линейного фильтра на величину 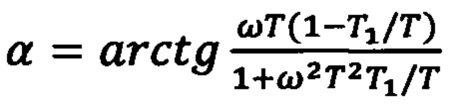 (Фиг. 4). Далее сигналы U3 и U4 подаются на входы сумматора 5, где в результате сложения их результирующий сигнал U5 (Фиг. 4) подается на вход блока дифференцирования 6, в котором происходит определение производной сигнала U5 (Фиг. 5). После чего выходной сигнал блока дифференцирования U6 поступает на вход блока сигнатуры 7, где сформированный сигнал U7, принимает значения 1 и -1 (Фиг. 6). После чего сигнал U7, подается на второй вход блока умножения 3, где умножается на сигнал |U2|, в результате чего сигнал на выходе устройства |U8| имеет вид, представленный на Фиг. 7.
(Фиг. 4). Далее сигналы U3 и U4 подаются на входы сумматора 5, где в результате сложения их результирующий сигнал U5 (Фиг. 4) подается на вход блока дифференцирования 6, в котором происходит определение производной сигнала U5 (Фиг. 5). После чего выходной сигнал блока дифференцирования U6 поступает на вход блока сигнатуры 7, где сформированный сигнал U7, принимает значения 1 и -1 (Фиг. 6). После чего сигнал U7, подается на второй вход блока умножения 3, где умножается на сигнал |U2|, в результате чего сигнал на выходе устройства |U8| имеет вид, представленный на Фиг. 7.
Заявленное изобретение было апробировано в лабораторных условиях Санкт-Петербургского государственного университета и результаты апробации приведены в виде конкретных примеров.
Пример реализации способа фазовой компенсации в механизмах управления транспортными средствами.
Было проведено моделирование работы устройства для реализации фазовой компенсации в механизмах управления транспортными средствами при подаче на его вход гармонического синусоидального сигнала с частотой 2 рад/с и амплитудой равной 5 (Фиг. 1). Постоянные времени второго линейного фильтра приняты: T=1, T1=0,01, коэффициент передаточной функции третьего фильтра а=1, частота среза ωо=10. Сигнал на выходе устройства представлен на Фиг. 7, где видно, что выходной сигнал имеет опережение по фазе равное 180 градусов относительно входного сигнала.
Результаты проведенного моделирования заявленного способа и устройства, изложенного в примере, показали работоспособность изобретения. Технико-экономическая эффективность заявленного изобретения состоит в том, что польза от применения изобретения значительно превышает затраты на его производство, так как в целом его использование в системах автоматического регулирования повышает качество и конкурентоспособность конечного продукта. Обоснование этого состоит в том, что устройство изобретения имеет простую конструкцию, низкую стоимость изготовления, высокую надежность и доступность компонентов устройства за счет использования известных аналоговых электронных компонентов. Заявленное изобретение позволяет решать задачи, связанные с предотвращением возникновения нелинейных колебаний в системе управления, сохраняет ее устойчивость, повышает отказоустойчивость за счет повышения корректирующего эффекта путем введения в контур управления фазового опережения для широкого диапазона систем, в том числе для пилотируемых систем управления полетом.
Используемые источники информации
1. D. Mcruer. Aviation safety and pilot control: understanding and preventing unfavorable pilot-vehicle interactions. National Academy Press, 1997. 220 p.
2. Ю.И. Топчеев. Нелинейные корректирующие устройства в системах автоматического управления. М: Машиностроение, 1971. - С. 207-209
3. Патент СССР №411430, МПК G05B 5/01. Нелинейное корректирующее устройство (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Система автоматического регулирования с компенсацией помех | 1980 |
|
SU941922A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Псевдолинейное корректирующее устройство для систем управления | 1982 |
|
SU1076870A1 |
| Система автоматического регулирования | 1979 |
|
SU930232A2 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
| Радиопередающее устройство с цифровой коррекцией нелинейности | 2019 |
|
RU2731135C1 |
| Нелинейное корректирующее устройство | 1980 |
|
SU951231A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
Изобретение относится к области автоматического регулирования в системах автоматического управления транспортными средствами с электроприводом, в том числе в системе управления летательным аппаратом и системах с временным запаздыванием. Технический результат: повышение корректирующего эффекта, что сохраняет устойчивость системы и предотвращает возникновение колебаний, расширяя возможности системы управления и область применения. Сущность: вход устройства для фазовой компенсации в механизмах управления транспортными средствами подключен к входу двух линейных фильтров и входу взятия модуля. Выход блока сигнатуры подключен ко второму входу блока умножения, выход которого является выходом устройства. Выход взятия модуля подключен к входу блока логического сравнения. Выход блока логического сравнения подключен к одному из входов блока умножения. Выходы линейных фильтров подключены к входам сумматора. Выход сумматора через блок дифференцирования подключен к входу блока сигнатуры. При этом один из линейных фильтров является форсирующим звеном и имеет передаточную функцию вида: 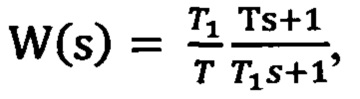 где s - оператор Лапласа, s=jω, где ω - частота, Т, Т1 - постоянные времени фильтра, которые выбираются так, чтобы фильтр обеспечивал максимальный запас по фазе, и Т>Т1, а другой линейный фильтр является высокочастотным с передаточной функцией вида:
где s - оператор Лапласа, s=jω, где ω - частота, Т, Т1 - постоянные времени фильтра, которые выбираются так, чтобы фильтр обеспечивал максимальный запас по фазе, и Т>Т1, а другой линейный фильтр является высокочастотным с передаточной функцией вида: 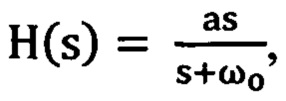 где s - оператор Лапласа, а>0 - коэффициент передаточной функции фильтра, определяющий уровень амплитудно-частотной характеристики, ωо - частота среза. 2 н.п. ф-лы, 7 ил.
где s - оператор Лапласа, а>0 - коэффициент передаточной функции фильтра, определяющий уровень амплитудно-частотной характеристики, ωо - частота среза. 2 н.п. ф-лы, 7 ил.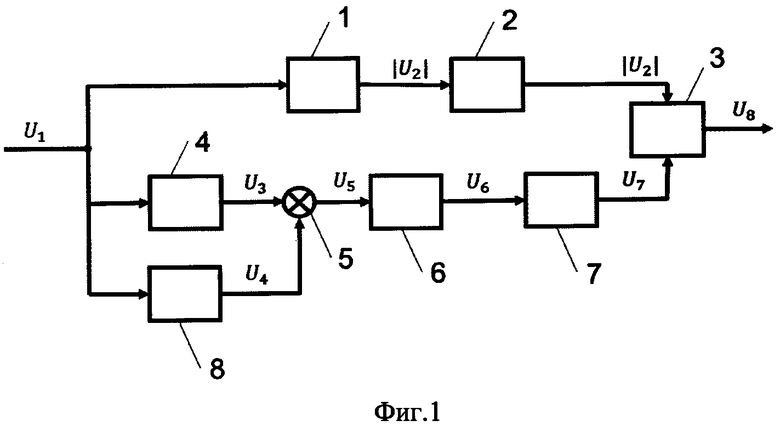
1. Способ фазовой компенсации в механизмах управления транспортными средствами, заключающийся в том, что входной сигнал поступает на вход линейных фильтров, выходной сигнал блока сигнатуры поступает на один из входов блока умножения, выход которого является выходом устройства, отличающийся тем, что один из линейных фильтров является форсирующим звеном и имеет передаточную функцию вида:
где s - оператор Лапласа, s=jω, где ω - частота, Т, Т1 - постоянные времени фильтра, которые выбираются так, чтобы фильтр обеспечивал максимальный запас по фазе, и Т>Т1, а другой линейный фильтр является высокочастотным с передаточной функцией вида:
где s - оператор Лапласа, а>0 - коэффициент передаточной функции фильтра, определяющий уровень амплитудно-частотной характеристики, ωо - частота среза,
при этом входной сигнал через блок взятия модуля поступает также на блок логического сравнения, выходной сигнал которого подают на второй вход блока умножения, сигналы на выходе линейных фильтров поступают на входы сумматора, сигнал на выходе которого через блок дифференцирования поступает на вход блока сигнатуры.
2. Устройство для фазовой компенсации в механизмах управления транспортными средствами, вход которого подключен к входам линейных фильтров, выход блока сигнатуры подключен к одному из входов блока умножения, выход которого является выходом устройства, отличающееся тем, что один из линейных фильтров является форсирующим звеном и имеет передаточную функцию вида:
где s - оператор Лапласа, s=jω, где ω - частота, Т, Т1 - постоянные времени фильтра, которые выбираются так, чтобы фильтр обеспечивал максимальный запас по фазе, и Т>Т1, а другой линейный фильтр является высокочастотным с передаточной функцией вида:
где s - оператор Лапласа, а>0 - коэффициент передаточной функции фильтра, определяющий уровень амплитудно-частотной характеристики, ωо - частота среза,
при этом вход устройства подключен также к входу взятия модуля, выход которого подключен к входу блока логического сравнения, выход которого подключен ко второму входу блока умножения, выходы линейных фильтров подключены к входам сумматора, выход которого через блок дифференцирования подключен к входу блока сигнатуры.
| SU 411430 A1, 15.01.1974 | |||
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2019 |
|
RU2734153C1 |
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ (ВАРИАНТЫ), СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ), УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И БЛОК ПОВЫШЕНИЯ АСТАТИЗМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2318234C9 |
| JP 61042015 A, 28.02.1986 | |||
| US 9008939 B2, 14.04.2015. | |||

