Известны устройства для контроля скорости вращения машин с массивным ротором, содержащие по числу контролируемых гиромоторов трехфазные импульсные трансформаторы, логические схемы совпадения, формирователи, источники постоянного и переменного трехфазного тока. Эти устройства не могут быть использованы, если число гиромоторов в контролируемой системе четное или менее трех. При механическом заклинивании двух контролируемых гиромоторов из трех, или трех из пяти, четырех из семи и т. н. они выдают ложный сигнал исправности.
В предлагаемом устройстве вторичная обмотка каждого трехфазного импульсного трансформатора подключена к одному из входов соответствующей схемы совпадения, вторые входы схем совпадения подключены к выходу формирователя опрашивающего импульса, который через элемент задержки и формирователь опорного сигнала подключен к одной из фаз источника напряжения питания, служащей опорной.
Это позволяет контролировать любое количество гиромоторов и исключить выдачу ложного сигнала в случае отказа любого сочетания гиро.моторов.
ние какого-либо из параметров гиромотора, изменяющегося в процессе изменения его оборотов. Одним из таких параметров является cos f гиромотора, так как при изменении скорости меняется фаза вектора тока заторможенного гиромотора по отношению к фазе вектора тока гиромотора, скорость вращения которого равна или близка к номинальной. Поскольку зависимость cos/ гиромотора от
его скорости нелинейна, такой способ контроля целесообразен не для непосредственного измерения мгновенной скорости, а в случае, когда необходимо иметь информацию об изменении фактической скорости относительно
минимально допустимой.
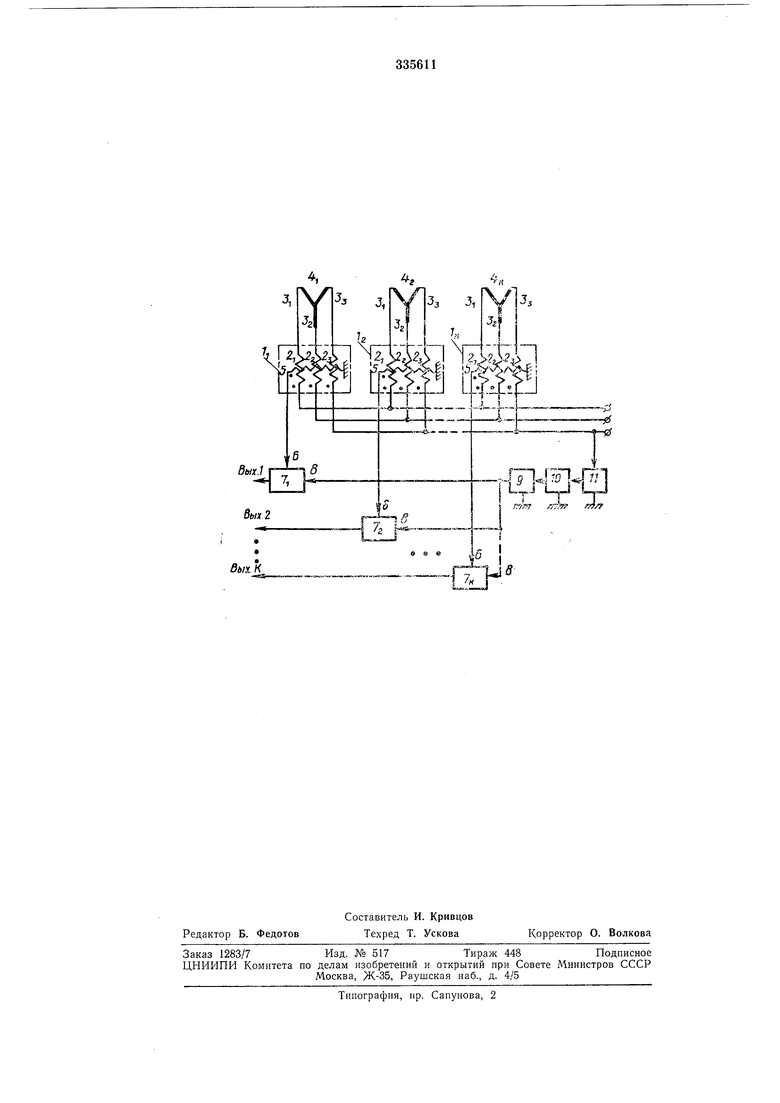
На чертеже представлена блок-схема устройства для контроля скорости вращения машин с массивным ротором. Устройство содержит трехфазные импульсные трансформаторы /i, /2, -, h (но числу контролируемых гиромоторов). У каждого трансформатора концы первичных обмоток 2i, 22, 2з подключены к статорным обмоткам 3i, 82, з гиромоторов 4i, 42, .., 4h, а их начала -
к соответствующим фазам источника питания трехфазного переменного тока (источники питания на чертел е не показаны). Начало вторичной обмотки 5 каждого импульсного трансформатора подключено на вход 6 соответВход 8 каждой из этих схем совпадения подключен к выходу формирователя опрашивающего импульса 9. Вход этого формирователя через элемент задержки 10 подключен к выходу формирователя опорного импульса 11, а вход последнего подключен к первой фазе напряжения питапия трехфазного переменного тока, являющейся в рассматриваемом случае опорной.
Формирователь 9 предназначен для формирования импульса, длительность которого пропорциональна разности минимально и максимально допустимых скоростей гиромоторов.
Элемент задержки 10 необходим для формирования импульса, длительность которого характеризует диапазон скоростей отказа гиромоторов. Этот диапазон по полю скоростей гиромотора лежит в пределах от минимально допустимой скорости вращения гиромотора до нуля.
Формирователь опорного импульса 11 служит для выделения момента изменения полярности полуволн синусоиды одной из фаз напряжения питания гиромоторов, выбранной в качестве опорной. Этот момент принимается за начало отсчета фаз при контроле скорости вращения гиромоторов. В качестве опорной фазы может быть выбрана любая из фаз источника напряжения питания трехфазного переменного тока.
Такое выполнение устройства для контроля скорости вращения позволяет непрерывно контролировать вращение любого количества гиромоторов, а при механическом заклинивании любого их числа выдавать сигнал отказа последних.
В исходном состоянии все контролируемые гиромоторы имеют номинальные обороты, и на обмотках 5 наводятся биполярные импульсы с частотой 3 / где f - частота источника напряжения трехфазного переменного тока. Эти импульсы поступают на вход 6 соответствующей схемы совпадения 7, 7,.. ., 7k. Временное положение нмпульсов напряжения, наводимых на обмотке 5 трансформаторов /1, 1-2,. .., Ik, соответствует фазе вектора тока статора соответствующего гиромотора, которая, в свою очередь, определяется его мгновенной скоростью. При наборе гиромотором номинальных оборотов импульсы напряжения на обмотке 5, поступающие на вход 6 соответствующих схем совпадения, занимают строго определенное положение по фазе. В этот момент на вход 8 схем совпадения поступает опрашивающий импульс, фазовое положение которого соответствует минимально допустимой скорости данных гиромоторов, а длительность - разности минимально и максимально допустимых оборотов гиромоторов. Если при подаче опорного импульса с формирователя 9 на вход 8 схем совпадения скорость гиромоторов близка или равна номинальной, то на выходе схем 7, 7 -, 7k появляется сигнал. Последовательность сигналов на выходе этих схем наблюдается до
тех пор, пока контролируемые гиромоторы вращаются со скоростью выше минимально допустимой. При изменении скорости вращения гиромотора изменяет свое доложение но фазе и вектор тока его статора. Когда скорость вращения гиромотора становится меньше минимально допустимой, сигнал на входе 6 соответствующей схемы совпадения сдвигается по фазе относительно опорного
сигнала так, что они не будут совпадать во времени. Поэтому на выходе данной схемы совпадения сигнала не будет. Отсутствие сигналов на выходе схемы совпадения регистрируется как отказ гиромотора.
Если отказ одного или группы гиромоторов происходит в результате обрыва по крайней мере одной фазы питания, импульсы напряжения на обмотках 5 соответствующих трансформаторов не наводятся и поэтому временного совпадения их с опрашивающим импульсом на входах 8 схем совпадепия 7i, 7,.. ., 7h не происходит.
При механическом заклинивании одного или нескольких гиромоторов, т. е. при изменении скорости вращения этих гиромоторов до нуля, угол сдвига вектора тока статора заклиненных гиромоторов по отношению к вектору напряжения питания достигает максимума. В этом случае фазовое рассогласование
опрашивающего импульса и импульсов напряжения, снимаемых с обмоток 5 трансформаторов заклиненных гиромоторов, также достигает максимума. В результате этого на выходах схем совпадения, соответствующих заклиненным гиромоторам сигналы не появляются, что регистрируется как отказ работы соответствующего гиромотора.
Выходные сигналы схем совпадения обрабатываются известными способами, например,
с помощью алгоритма, выполняющего логическую операцию пересечения, благодаря чему можно получать информацию об исправности всей контролируемой системы.
Предмет изобретения
Устройство для контроля скорости вращения машин с массивным ротором, содержащее по числу контролируемых гнромоторов трехфазные импульсные трансформаторы, логические схемы совпадения, форм.ирователи, источники постоянного и переменного трехфазного тока, отличающееся тем, что, с целью обеспечения контроля любого количества гиромоторов и исключения выдачи ложного сигнала в случае отказа любого сочетания гиромоторов, вторичная обмотка каждого трехфазного импульсного трансформатора подключена к одному из входов соответствующей схемы совпадения, вторые входы схем совпадепия подключены к выходу формирователя опрашивающего импульса, который через элемент задержки и формирователь опорного сигнала подключен к одной из фаз источника напряBbtx.l
6ых2
ы, К
j
L
rfi 44-Н
-fi-Cf
,
u™J
iL
. /77,W Л
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2101749C1 |
| Устройство определения исправной работы гиромоторов блока демпфирующих гироскопов | 2023 |
|
RU2803706C1 |
| СИСТЕМА КОНТРОЛЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2285237C2 |
| Устройство для проверки правильности схемы включения трехфазного двухэлементного счетчика активной электроэнергии | 1989 |
|
SU1705789A1 |
| Устройство для векторно-импульсного управления асинхронным электроприводом | 1975 |
|
SU600681A1 |
| УСТРОЙСТВО КОНТРОЛЯ ЧЕРЕДОВАНИЯ ФАЗ ТРЕХФАЗНОЙ СЕТИ | 1993 |
|
RU2050554C1 |
| Система формирования выходного сигнала блоков демпфирующих гироскопов | 2017 |
|
RU2676049C1 |
| Устройство для контроля работоспособности однотипных гиромоторов | 1969 |
|
SU438076A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ЛЕТАТЕЛЬНОГО АППАРАТА И ИСТОЧНИК ПИТАНИЯ | 1997 |
|
RU2196302C2 |
| СИСТЕМА КОНТРОЛЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2306651C1 |