Изобретение относится к гироскопической технике, а именно к измерению угловых скоростей подвижных объектов, и может быть применено в системах автоматического управления, например, летательными аппаратами.
Известен блок демпфирующих гироскопов БДГ-30-1, (ОАО «Уральский приборостроительный завод», г. Екатеринбург), состоящий из трех ортогонально расположенных в корпусе датчиков угловых скоростей (ДУС) на базе двухстепенных гироскопов, по одному на каждую ось измерения.
Однако у блока БДГ-30-1 нет встроенного контроля, что снижает его надежность и, в конечном счете, точность формирования выходных сигналов.
Известен блок демпфирующих гироскопов БДГ-26, взятый за прототип (ОАО «Арзамасский приборостроительный завод им. П.И. Пландина», «Техническое описание и инструкция по эксплуатации блоков демпфирующих гироскопов БДГ-25 и БДГ-26»). Блок БДГ-26 состоит из двух ДУС на измерительный канал. Каждый ДУС представляет гиромотор, помещенный в рамку, на оси подвеса которой находится потенциометрический датчик угла, а для измерения гироскопического момента применена механическая пружина. В фазовые обмотки гиромотора, соединенных в звезду, включены первичные обмотки импульсных трансформаторов, через которые гиромотор подключается к блоку трехфазного питания. Вторичные обмотки импульсных трансформаторов соединены последовательно и подключены к блоку контроля вращения гиромоторов для каждого ДУС, входящего в состав БДГ. Если гиромоторы вращаются в номинальном режиме, блок контроля вращения гиромоторов выдает сигнал «Исправность», в противном случае этот блок выдает сигнал «Отказ» и данный БДГ отключается от системы управления летательным аппаратом. Дальнейшее функционирование системы управления летательным аппаратом по данному каналу будут обеспечивать правильно работающие БДГ.
Недостатком набора блоков БДГ, работающих на один канал, является отсутствие системы формирования выходного сигнала блоков демпфирующих гироскопов, которая повышала бы точность формирования выходного сигнала.
Техническим результатом изобретения является повышение точности формирования выходного сигнала блоков демпфирующих гироскопов, работающих на один канал, за счет осреднения выходных сигналов датчиков угловых скоростей, входящих в блок демпфирующих гироскопов.
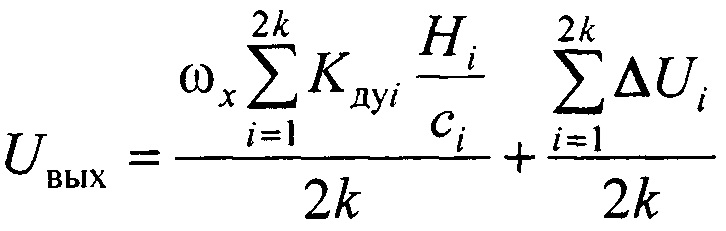
Технический результат достигается тем, что в системе формирования выходного сигнала блоков демпфирующих гироскопов, содержащей «n» блоков демпфирующих гироскопов на каждый из трех измерительных каналов, каждый из блоков состоит из двух датчиков угловых скоростей с одинаковой ориентацией входных осей, гиромоторы которых подключены к блоку питания через первичные обмотки соответствующих импульсных трансформаторов, вторичные обмотки которых соединены с первым и вторым входами соответствующих блоков контроля вращения гиромоторов, новым является то, что в нее введен блок формирования выходного сигнала, на «2n» сигнальных входов которого подключены выходы «2n» датчиков угловых скоростей, при этом «n» выходов блоков контроля вращения гиромоторов соединены с «n» управляющими входами блока формирования выходного сигнала, алгоритм функционирования которого определяется выражением
 ,
,
где k=[1÷n] соответствует числу любых нормально функционирующих блоков демпфирующих гироскопов;
Uвых - выходное напряжение блока формирования выходного сигнала;
Kдуi, Hi, ci, ΔUi - крутизна датчика углов, кинетический момент, жесткость пружины, погрешность измерения i-го датчика угловых скоростей, обусловленная перекрестной угловой скоростью; ωx - входная угловая скорость измерительного канала.
Сущность изобретения поясняется чертежами, представленными на фиг. 1 - фиг. 3.
На фиг. 1 система формирования выходного сигнала блоков демпфирующих гироскопов для варианта, когда n=3.
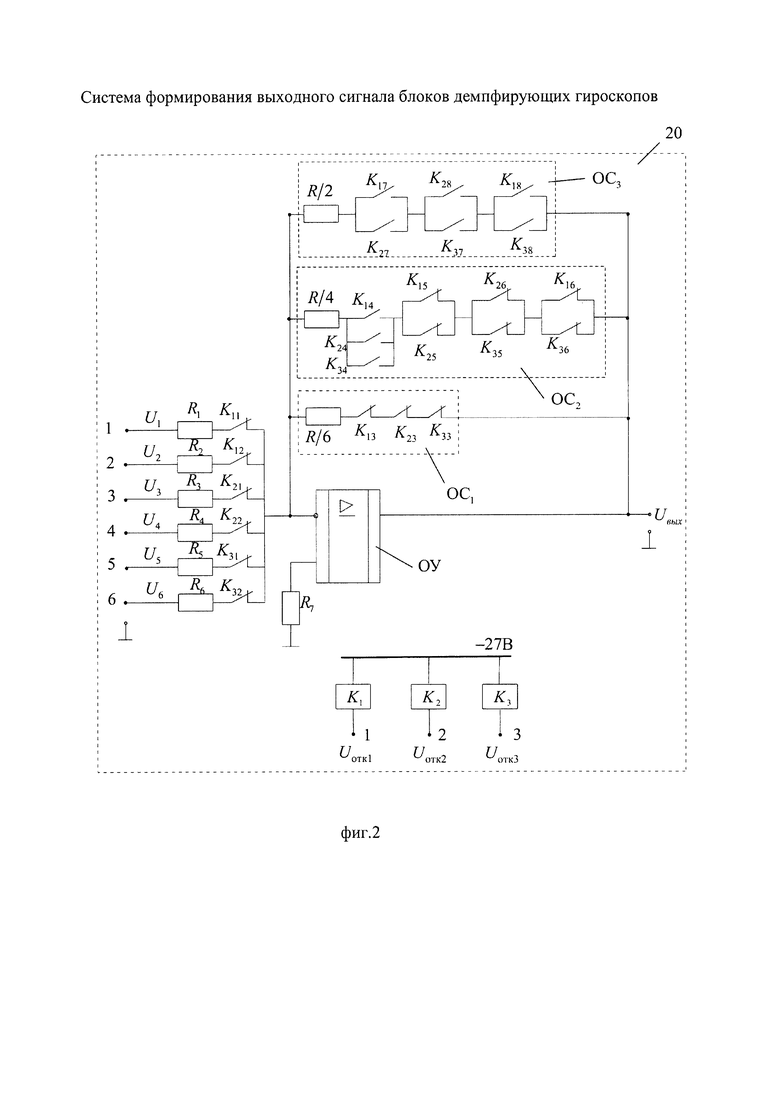
На фиг. 2 вариант построения блока формирования выходного сигнала на операционном усилителе и аналоговых коммутаторах.
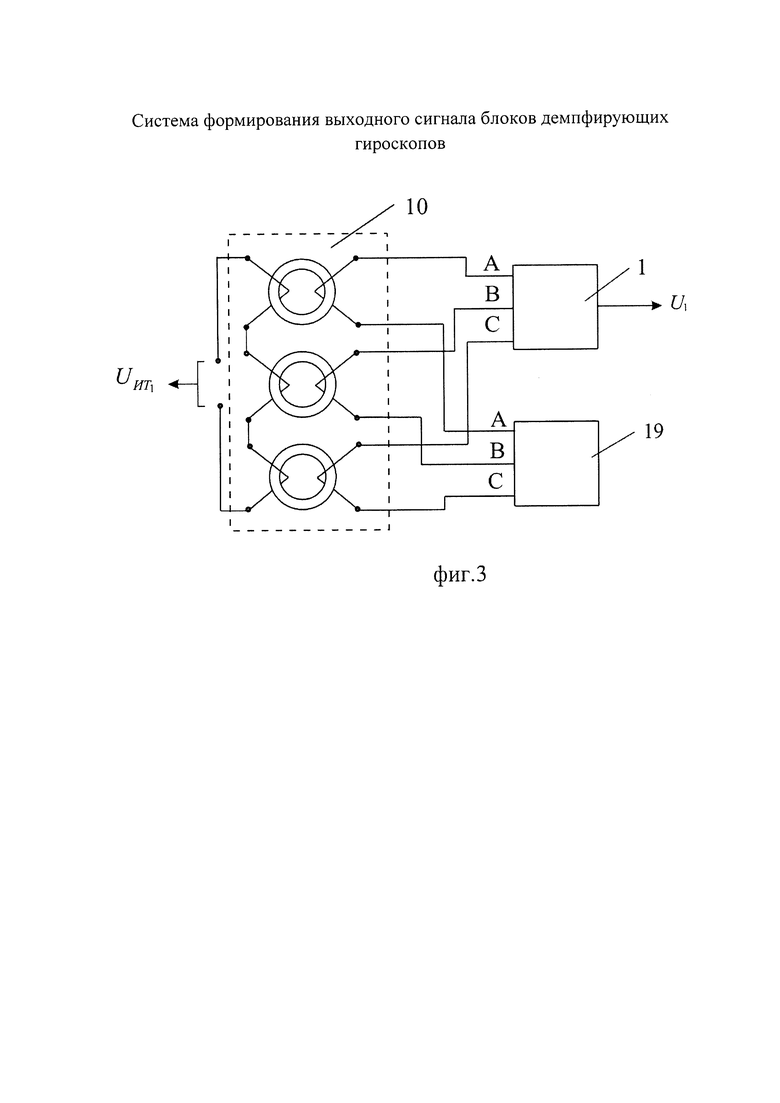
На фиг. 3 приведена схема подключения блока питания к гиромотору одного из датчиков угловых скоростей через импульсный трансформатор и формирование его выходного напряжения.
Здесь приняты следующие обозначения:
1 и 2 - датчики угловых скоростей блока демпфирующих гироскопов БДГ1;
3 и 4 - датчики угловых скоростей блока демпфирующих гироскопов БДГ2;
5 и 6 - датчики угловых скоростей блока демпфирующих гироскопов БДГ3;
7; 8; 9 - блоки демпфирующих гироскопов БДГ1, БДГ2, БДГ3;
10 и 11 - импульсные трансформаторы для питания гиромоторов БДГ1;
12 и 13 - импульсные трансформаторы для питания гиромоторов БДГ2;
14 и 15 - импульсные трансформаторы для питания гиромоторов БДГ3;
16; 17; 18 - блоки контроля вращения гиромоторов (БКВГ) соответствующих БДГ;
19 - блок питания гиромоторов трехфазным напряжением;
20 - блок формирования выходного сигнала;
UИТi - выходные напряжения импульсных трансформаторов, где i=1÷6;
Uоткi - выходные напряжения БКВГi, где i=1÷3;
Uоткi=-27 В (корпус), если роторы гиромоторов ДУС конкретного БДГ вращаются в номинальных режимах, где i=1÷3;
Uоткi=+27 В БКВГi, если роторы гиромоторов ДУС конкретного БДГ вращаются не в номинальных режимах, где i=1÷3;
 - выходные сигналы ДУС, где i=1÷6;
- выходные сигналы ДУС, где i=1÷6;
ωх, ωп - измеряемая и перекрестная угловые скорости для всех БДГ; Hj, ci, ΔUi - кинетический момент, жесткость пружины и погрешность измерения i-го ДУС, обусловленная перекрестной угловой скоростью, которая для малых углов отклонения определяется выражением
 ;
;
Uвых - выходное напряжение блока формирования выходного сигнала.
Блок формирования выходного сигнала, представленный на фиг. 2, представляет систему с переменной обратной связью в цепи операционного усилителя.
На фиг. 2 приняты следующие обозначения:
ОУ - операционный усилитель;
Ri=R - сопротивления резисторов входной цепи ОУ;
К1, K2, K3 - управляемые коммутаторы;
K1 имеет К11, К12, К13, К15, К16 нормально замкнутые контакты и K14, K17, K18 нормально разомкнутые контакты;
K2 имеет K21, K22, K23, K25, K26 нормально замкнутые контакты и K24, K27, K28 нормально разомкнутые контакты;
K3 имеет K31, K32, K33, K35, K36 нормально замкнутые контакты и K34, K37, K38 нормально разомкнутые контакты.
Kij обозначение контактов введено для удобства понимания, где i - номер коммутатора, j - номер контакта соответствующего коммутатора;
ОС1 - первая обратная связь, сопротивление резистора которой равно R/6;
OC2 - вторая обратная связь, сопротивление резистора которой равной R/4;
ОС3 - третья обратная связь, сопротивление резистора которой равной R/2;
Uоткi=+27 В БКВГi, i=1÷3 - напряжения, вырабатываемые блоками 16, 17 или 18 при отказе по цепи гиромоторов одного из ДУС;
R7 - балластный резистор, стандартно подключаемый на не инвертируемый вход ОУ.
На фиг. 3 показано подключение гиромотора 1 (см. фиг. 1) к блоку 19 трехфазного питания (36 В, 400 Гц, фазы А, В, С) через импульсный трансформатор 10 для БДГ 7, ДУС 1. Импульсные трансформаторы построены на трех тороидальных сердечниках, при этом каждая фаза питания А, В, С подается на гиромоторы ДУС индивидуально через первичные обмотки. Вторичные обмотки импульсных трансформаторов намотаны одновременно на все три сердечника и электрически подключены к блокам контроля вращения гиромоторов.
Каждый БДГ 7-9 состоит из двух ДУС 1 и 2, 3 и 4, 5 и 6, построенных на базе двухстепенных гироскопов с механической или электрической пружинами в цепи обратной связи (в прототипе применены ДУС с механической обратной связью). Гиромоторы ДУС представляют трехфазные асинхронные двигатели, а выходной сигнал каждого ДУС снимается с датчика углов, расположенного на выходной оси ДУС, в виде напряжений Ui, i=1÷6.
Работоспособность ДУС в полете можно проверить двумя способами.
Способ контроля, основанный на сравнении выходных сигналов ДУС, снимаемых с потенциометров, с помощью кворум-элемента. В этом случае необходимо анализировать выходные сигналы минимум трех ДУС и при выходе из строя одного из ДУС он отключается, по двум оставшимся отказавший ДУС определить уже не представляется возможным.
Способ контроля, основанный на контроле вращения гиромоторов. При этом способе (примененном в БДГ-26) можно определить только по двум гиромоторам, что один из них отказал (какой, не важно, т.к. отключается при этом весь БДГ). Однако при этом необходимо ввести дополнительный элемент - импульсный трансформатор, через который подается трехфазное питание на гиромоторы.
Предлагаемое изобретение использует второй способ контроля, предполагая, что гиромоторы являются более ответственным узлом прибора.
Система формирования выходного сигнала блоков демпфирующих гироскопов работает следующим образом. При этом рассмотрим три варианта.
Вариант 1. Гиромоторы всех ДУС в БДГ работают в номинальном режиме.
На фиг. 1 и фиг. 2 состояние контактов изображено в состоянии, когда три БДГ 7-9 функционируют исправно. Так как все гиромоторы ДУС 1-6 вращаются в номинальных режимах, то блоки контроля вращения гиромоторов 16-18 не выдают сигнал отказ и напряжения на их выходах равно -27 В, т.е.
Uоткi=-27 B, i=1÷3
и управляемые коммутаторы Ki, i=1÷3 находятся в обесточенном состоянии, а контакты Kij, i=1÷3; j=1÷8 - в состоянии, приведенном на фиг. 2. При этом формируется цепь обратной связи ОС1 в которой все контакты замкнуты, а выходной сигнал определяется выражением

Вариант 2. Гиромотор одного из ДУС любого БДГ отказал. Предположим, что отказал гиромотор ДУС 1 БДГ 7. В этом случае напряжения UИТ1 и UИТ2 вторичных обмоток импульсных трансформаторов 10 и 11 будут не соответствовать номинальным оборотам и блок контроля вращения гиромоторов 16 сформирует сигнал отказа Uотк1 в виде напряжения +27 В БКВГ1, которое вызывает срабатывание управляемого коммутатора K1, который произведет следующие переключения:
- отключит ДУС 1 и 2 от блока 20 (разомкнутся контакты K11 и K12);
- разорвет цепь обратной связи OC1 (разомкнется контакт K13);
- цепь обратной связи ОС3 останется разомкнутой (контакты K28 и K37 остаются разомкнутыми);
- сформирует цепь обратной связи ОС2 (замкнется контакт K14),
и выходное напряжение блока 20 будет сформировано в виде

Вариант 3. Гиромоторы двух ДУС двух любых БДГ отказали.
Предположим, что отказал гиромотор ДУС 1 БДГ 7 и гиромотор ДУС 3 БДГ 8. В этом случае напряжения UИТ1 и UИТ2 и UИТ3 и UИТ4 вторичных обмоток импульсных трансформаторов 10 и 11, а также 12 и 13 будут не соответствовать номинальным оборотам и блоки контроля вращения гиромоторов 16 и 17 сформируют сигналы отказа Uотк1 и Uотк2 в виде напряжения +27 В БКВГ1 и +27 В БКВГ2, которые вызывают срабатывание управляемых коммутаторов K1 и K2, которые произведут следующие переключения:
- отключат ДУС 1 и 2 и ДУС 3 и 4 от блока 20 (разомкнутся контакты K11 и K12, K21 и K22);
- разорвут цепь обратной связи OC1 (разомкнутся контакты K13 и K23);
- разорвут цепи обратной связи ОС2 (разомкнутся контакты K15 и K16 и контакты K25 и K26);
- сформируют цепь обратной связи ОС3 (замкнутся контакты K17 и K18 и K27 и K28),
и выходное напряжение блока 20 будет сформировано в виде

Выражения (1) - (3) можно представить одной формулой для «n» блоков демпфирующих гироскопов на канал
 ,
,
где k=[1÷n] соответствует числу любых нормально функционирующих блоков демпфирующих гироскопов.
Как следует из выражений для выходного сигнала, на точность измерения угловой скорости оказывают влияние большое количество конструктивных параметров, которые имеют отклонения от номинальных значений по случайному закону. Поэтому, осредняя сигналы всех ДУС, входящих в БДГ и работающих на один канал измерения, получаем осреднение суммарной погрешности и, следовательно, повышение точности измерения без снижения надежности работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения исправной работы гиромоторов блока демпфирующих гироскопов | 2023 |
|
RU2803706C1 |
| Способ определения исправной работы гиромоторов блока демпфирующих гироскопов | 2023 |
|
RU2805375C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2101749C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЫХОДНОЙ ИНФОРМАЦИИ В БЛОКЕ ГИРОСКОПОВ И ТРЕХОСНЫЙ БЛОК ДЕМПФИРУЮЩИХ ГИРОСКОПОВ | 2015 |
|
RU2598145C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТА СТВОЛА СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2085730C1 |

Изобретение относится к области навигационного приборостроения и может найти применение в системах автоматического управления, например, летательными аппаратами. Технический результат – повышение точности. Для этого система формирования выходного сигнала блоков демпфирующих гироскопов содержит n блоков демпфирующих гироскопов на каждом из трех измерительных каналов, каждый из блоков состоит из двух датчиков угловых скоростей с одинаковой ориентацией входных осей. Гиромоторы датчиков угловых скоростей подключены к блоку питания через первичные обмотки соответствующих импульсных трансформаторов, вторичные обмотки которых соединены с первым и вторым входами соответствующих блоков контроля вращения гиромоторов, выдающих сигнал отказа при отказе одного из датчиков угловых скоростей, входящих в блок демпфирующих гироскопов. Выходы 2n датчиков угловых скоростей подключены на сигнальные входы блока формирования выходного сигнала, на управляющие входы которого подключены выходы n блоков контроля вращения гиромоторов. Выходной сигнал блока формирования выходного сигнала определяется выражением
 ,
,
где k = 1, 2, …, n соответствует числу любых нормально функционирующих блоков демпфирующих гироскопов; Uвых - выходное напряжение блока формирования выходного сигнала; Kдуi, Hi, сi, ΔUi - крутизна датчика углов, кинетический момент, жесткость пружины, погрешность измерения i-го датчика угловых скоростей; ωx - входная угловая скорость измерительного канала. Из выражения для выходного сигнала следует, что точность измерения угловой скорости зависит от большого количества конструктивных параметров, которые имеют отклонения от номинальных значений по случайному закону. Поэтому, осредняя сигналы всех ДУС, входящих в БДГ и работающих на один канал измерения, получаем осреднение суммарной погрешности и, следовательно, повышение точности измерения без снижения надежности работы. 3 ил.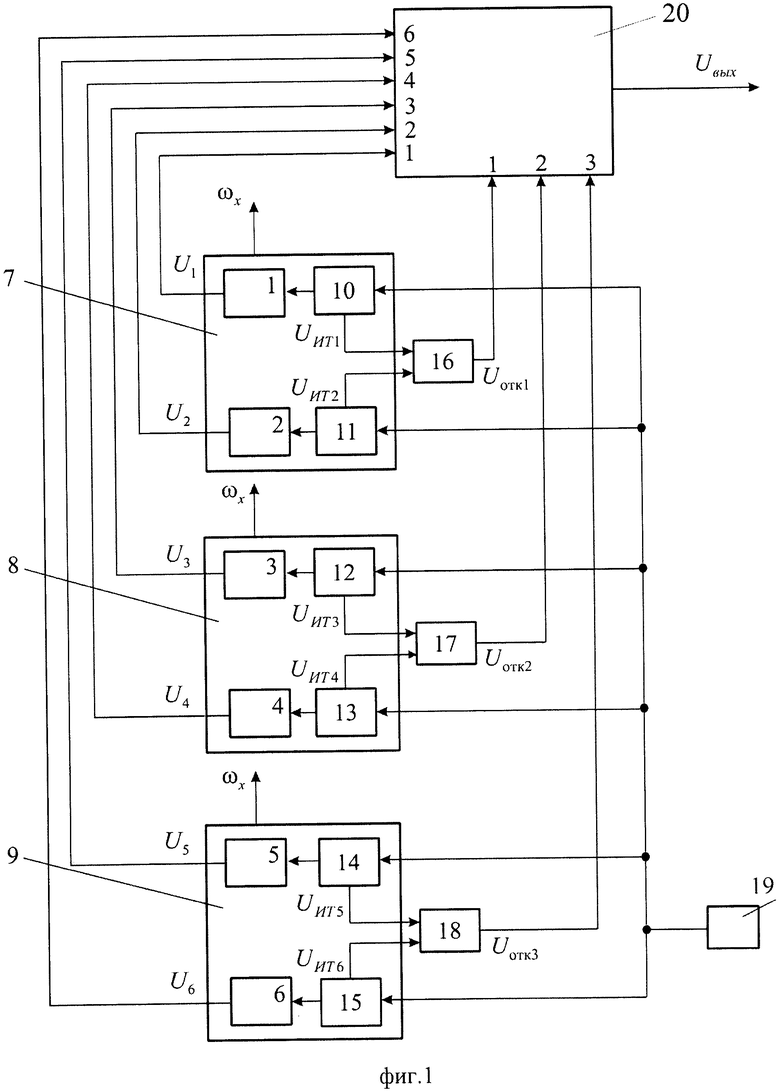
Система формирования выходного сигнала блоков демпфирующих гироскопов, содержащая n блоков демпфирующих гироскопов на каждом из трех измерительных каналов, каждый блок состоит из двух датчиков угловых скоростей с одинаковой ориентацией входных осей, гиромоторы которых подключены к блоку питания через первичные обмотки соответствующих импульсных трансформаторов, вторичные обмотки которых соединены с первым и вторым входами соответствующих блоков контроля вращения гиромоторов, отличающаяся тем, что система содержит блок формирования выходного сигнала, на 2n сигнальных входах которого подключены выходы 2n датчиков угловых скоростей, при этом n выходов блоков контроля вращения гиромоторов соеденены с n управляющими входами блока формирования выходного сигнала, алгоритм функционирования которого определяется выражением
 ,
,
где k=[1÷n] соответствует числу любых нормально функционирующих блоков демпфирующих гироскопов;
Uвых - выходное напряжение блока формирования выходного сигнала;
Kдуi, Hi, ci, ΔUi - крутизна датчика углов, кинетический момент, жесткость пружины, погрешность измерения i-го датчика угловых скоростей;
ωx - входная угловая скорость измерительного канала.
| СПОСОБ ФОРМИРОВАНИЯ ВЫХОДНОЙ ИНФОРМАЦИИ В БЛОКЕ ГИРОСКОПОВ И ТРЕХОСНЫЙ БЛОК ДЕМПФИРУЮЩИХ ГИРОСКОПОВ | 2015 |
|
RU2598145C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2009 |
|
RU2393429C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТРОИТЕЛЯ ВЕРТИКАЛИ И ДАТЧИКОВ СКОРОСТЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2187141C1 |
| Способ поверки многокомандных приборов активного контроля | 1990 |
|
SU1793190A1 |
| Кузовков Н.Т.Системы стабилизации летательных аппаратов | |||
| М.: Высшая школа, 1976, с.191-205. | |||

