Изобретение относится к системам автоматического управления и регулирования. Устройство предназначено для воспроизведения непрерывной функции лри больших интервалах поступления дискретных данных, например при решении задач сопровождения и экстраполяции по дискретным данным радиолокационных станций кругового обзора.
Известны самонастраиваюшиеся системы Преобразования дискретных данных в непрерывные, содержашие анализатор ошибок системы, выход которого соединен с первым входом коммутатора, второй вход которого соединен с выходом первого сравнивающего элемента и с первыми входами двух блоков переключения коэффициентов усиления, а первый выход соединен со вторыми входами блоков переключения коэффициентов усиления, выход первого из которых соединен непосредственно с первым входом, а выход второго через первый интегратор - со вторым входом второго элемента сравнения, выход которого через второй интегратор соединен с первыми входами первого и третьего элементов сравнения; второй вход первого элемента сравнения соединен со входом системы, а выход третьего элемента - с ее выходом.
закона входного воздействия от линейного к квадратичному и обратно. Достигается она тем, что второй выход коммутатора соединен со вторым входом третьего сравнивающего
элемента через последовательно соединенные дополнительно установленные усилитель, сравнивающий элемент и первый интегратор, а со вторым входом дополнительного сравнивающего элемента - через второй дополнителЬный интегратор, второй вход которого соединен с первым выходом дополнительно установленной схемы сброса, второй выход которой соединен со вторым входом первого дополнительного интегратора. Третий выход
коммутатора соединен со входом анализатора ошибок системы, содержащего пороговое устройство, выход которого соединен с выходом анализатора, а вход - с выходом сумматора. Первый вход последнего через элемент
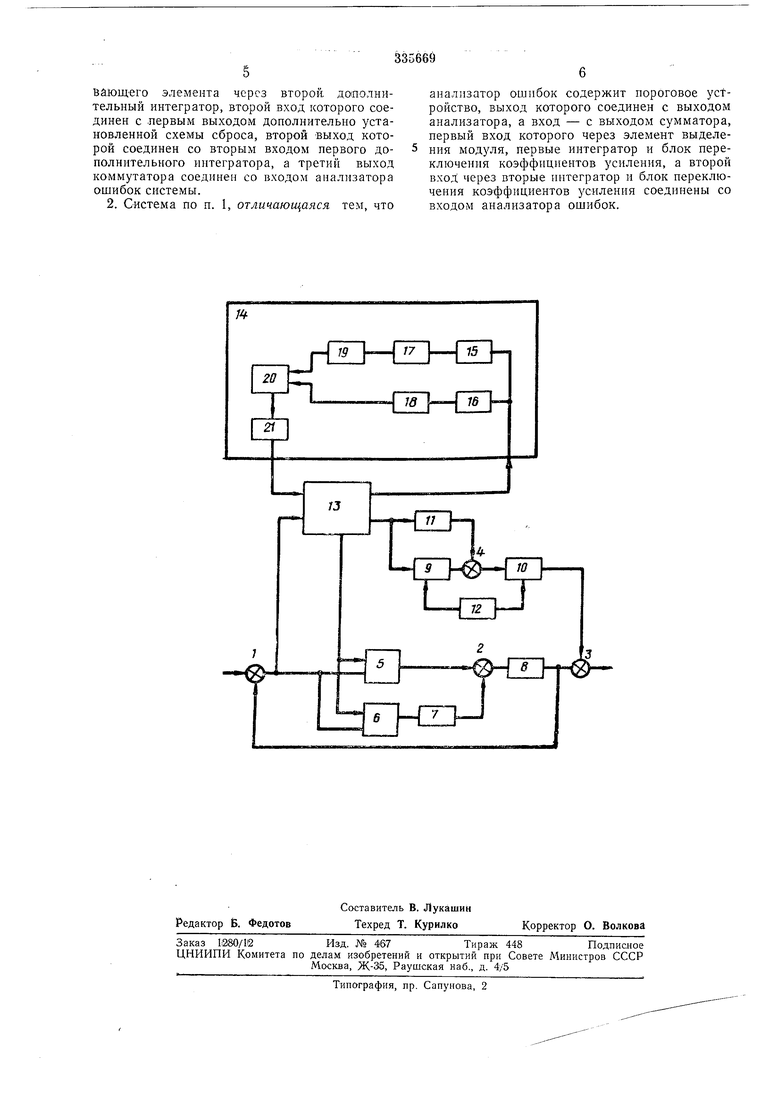
выделения модуля, первые интегратор и блок переключения коэффициентов усиления, а второй вход через вторые интегратор и блок переключения коэффициентов усиления. На чертеже представлена блок-схема системы.
Система содержит элементы сравнения /- 4, блоки 5 и 6 переключения коэффициентов усиления, интеграторы 7-10, усилитель 11, схему сброса 12, коммутатор 13 и анализатор
переключения коэффициентов усиления, интеграторы 17 и 18, выделения модуля 19, сумматор 20 и пороговое устройство 21.
Работает система следующим образом.
В качестве закона изменения непрерывной выходной величины принят многочлен
у(/) о„ + а, + а,+... + о„;
где а - коэффициенты, определяющие вид экстраполяции и сглаживающие свойства экстраполятора.
Для уменьшения ошибок воспроизведения при преобразовании дискретных данных в непрерывные в системе решение на перестройку параметров основного коптура или (подключение доиолнительного контура принимается контуром самонастройки «а основании статистической Оценки величины динамической составляющей ошибки, зависящей от у1скорвния управляющего воздействия. Алгоритм функционирования контура самонастройки для случая последовательного анализа среднего незавиСИМых и распределенных по нормальному закону выбор01К ошибки имеет вид:
1
- Ks-m,
i l
где Zm-коэффициент правдоподобия; К.1 и Kz-параметры коптура самонастройки; т - количество измеренных значений
ошибки до принятия решения; а - среднеквадратическоезначение
входных помех.
Решение о перестройке параметров принимается на основе проверки следующих соотношений:
при работа продолжается при прежних параметрах , 2, 3, ...,
/г-1);
при принимается решение перестроить систему на высшую ступень;
при принимается решение перестроить систему на низшую ступень; причем
In Л In
-«„
где а.ц.в - априорно допускаемая вероятность ложной перестройки на высшую ступень;
рл. н - априорно допускаемая вероятность ложной перестройки на низшую ступень.
Предположим, что происходит преобразование дискретных данных, изменяющихся по линейному аакону.
При поступлении на вход системы квадратичного воздействия в цепи ошибки помимо случайной составляющей возникает динамическая составляющая ошибки. Импульсы ошибки суммируются в интеграторе 17, и накопленная ошибка через элемент выделения модуля
19 поступает на сумматор 20, где складывается с выходным напряжением интегратора 18, генерирующего линейно изменяющуюся функцию, ордината которой в моменты отсчета ошибки пролорциональна количеству измерений ошибки ш.
Выходное папрялсепие сумматора, соответствующее коэффициенту правдоподобия Zm, поступает на вход порогового устройства и
сравнивается с его верхпим в и нижним Е граничными напряжениями, соответствующими границам переключений 1пЛ и In В.
Если напряжение Zm достигает верхней границы, коммутатор по команде порогового устройства переключает коэффициенты усиления блоков 5, 6, 15 и 16 от значений ступени / к значениям ступени //, а схема сброса замыкает цепи разряда конденсаторов в блоках 9 и 10, коэффициенты преобразования которых
определены из условия повышения порядка астатизма системы до третьего.
Если вторая производная входного воздействия значительна, то даже при параметрах ступени // динамическая ошибка может
иметь значение, при котором суммарный сигнал Zm еще раз превысит границу Е, и тогда коммутатор переключит параметры блоков 5, 6, 15 и 16 от ступени // к ступени /// и подключит дополнительный контур, а схема сброса разоядит конденсаторы в блоках 9 и 10.
При изменении закона входного воздействия с квадратичного на линейный ошибка снижается, значение 2,„ оказывается ниже
границы ш и структура системы переключается в обратном порядке.
Предмет изобретения
1. Самонастраивающаяся система преобразования дискретных данных в непрерывные, содержащая анализатор ошибок системы, выход которого соединен с первым входом коммутатора, второй вход которого соединен с
выходом .первого сравнивающего элемента и с первыми входами двух -блоков переключения коэффициентов усиления, а первый выход соединен со вторыми входами блоков переключения коэффициентов усиления, выход
первого из которых соединен непосредственно с первым входом, а выход второго через первый интегратор - вторым входом второго элемента сравнения, выход которого через второй интегратор соединен с первыми входами первого и третьего элементов сравнения, второй вход первого элемента сравнения соединен со входом системы, а выход третьего элемента - с ее выходом, отличающаяся тем, что, с целью повышения точности и быстродействия, второй выход коммутатора соединен со вторым входом третьего сравнивающего элемента через последовательно соединенные дополнительно установленные усилитель, сравнивающий элемент и первый интегратор,
вающего элемента через второй, дополнительный интегратор, второй вход которого соединен с .первым выходом дополнительно установленной схемы сброса, второй выход которой соединен со вторым входом первого дополнительного интегратора, а третий выход коммутатора соединен со входом анализатора ошибок системы. 2. Система по п. 1, отличающаяся тем, что
анализатор ошибок содержит пороговое устройство, выход которого соединен с выходом анализатора, а вход - с выходом сумматора, первый вход которого через элемент выделения модуля, первые иитегратор и блок переключения коэффициентов усиления, а второй вход через вторые интегратор и блок переключения коэффициентов усилення соединены со входом анализатора ошибок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНИК ЦИФРОВЫХ СИГНАЛОВ | 2010 |
|
RU2423794C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Устройство автоматической коррекции толщины полосы непрерывного стана горячей прокатки | 1977 |
|
SU735350A1 |
| Анализатор функций плотности распределения | 1989 |
|
SU1693603A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ ПО НАПРАВЛЕНИЮ | 1983 |
|
SU1840107A1 |
| РАДИОЛИНИЯ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2009 |
|
RU2411663C1 |
| Самонастраивающаяся система | 1980 |
|
SU928302A1 |
| Устройство для оценки сигналов | 1990 |
|
SU1743009A2 |
| Самонастраивающаяся система регулирования скорости | 1981 |
|
SU1007083A1 |
1-Г
15
