Известные способы ограличения грузоподъемности кранав мостового типа с отключением механизма подъема яри Превышении сигналом рассогласования заданного и фактического значений контролируемого параметра определенного уровня не обеспечивают достаточной точности ограничения грузолодъемности.
iC целью повышения точности ограничения грузоподъемности при подъеме груза предельного веса для получения сигнала, определяюш,его значение контролируемого параметра, измеряют фактическую длительность полупериода колебаний динамической системы кран - груз.
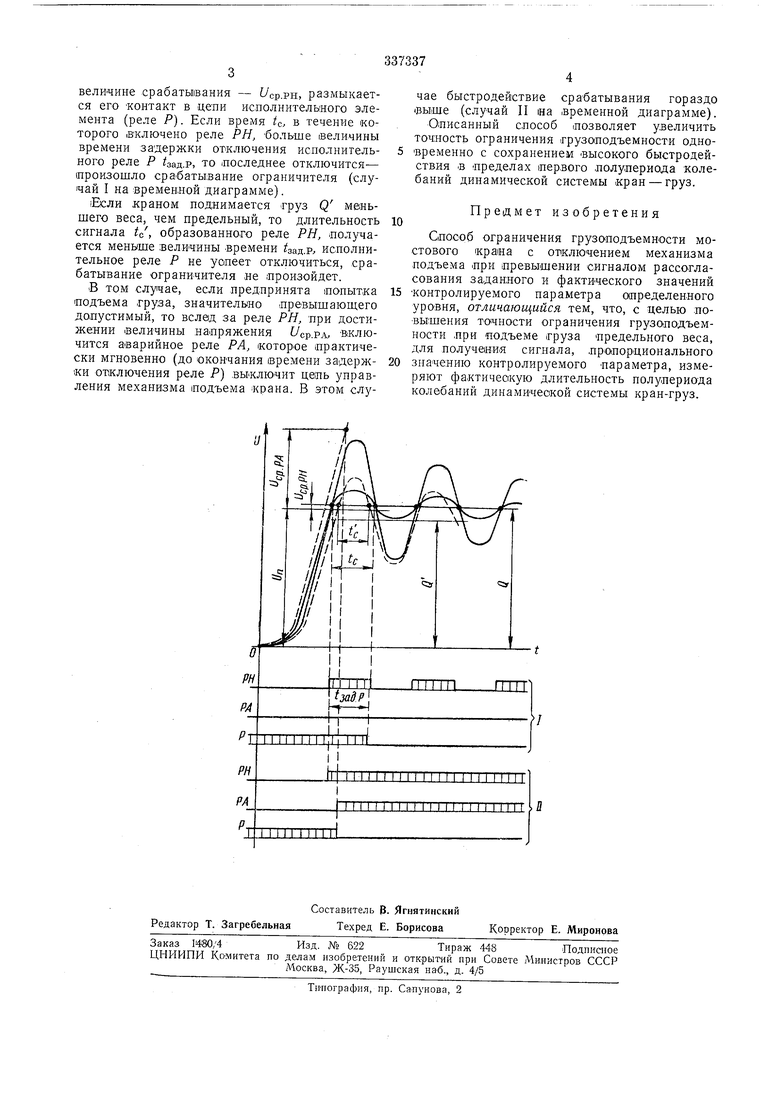
На чертеже схематически показано изменение усилий .в гибкой подвеске мостового крана в функции времени.
Согласно описываемому способу ограничения грузоподъемности кранов мостового типа величина предельного груза Q (от которого должен срабатывать ограничитель грузоподъемности) фиксируется ограничителем путем сравнения длительности сигнала tc, образованного его управляющим элементом (например электромагнитным реле РН), периодически срабатыйаюшим при динамическом изменении усилия, дейст1вуи ш,вго на ограничитель, с величиной времени задержки срабатывания исполнительного элемента ограничителя (например электромагнитного реле Р) - 4ад.р, устанавливаемой при его настройке.
В том случае, если время 4ад.р назначается равным половине периода колебаний усилия, действующего на ограничитель при подъеме груза предельного веса, динамическая ощибка ограничения грузоподъемности независимо от того, в каком режиме (с подхватом, с упругим подхватом, с веса) поднимается этот груз с опоры, может быть равной нулю. Тогда погрешность ограничения определяется только изменением частоты колебаний усилия в подвеске груза при изменении положения
тележки крана с предельным грузом по длине пролета. Однако эта погрещность для реальных кранов мостового типа гораздо меньши динамической ошибки, которую дают суП1ествующие способы ограничения грузоподъемности, достигающей значения 30-35% Для механизмов подъема мостовых кранов со скоростями подъема 20 м/мин.
Когда в процессе подъема груза Q напряжение электрического сигнала U, пропорциональное усилию в подвеске груза, становится больше опорной величины - напряжения t/n, В цепи управляющего элемента ограничителя грузоподъемности (реле РН) начинает протекать ток. Когда напряжение на обмотке
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ | 1973 |
|
SU368175A1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОГО КРАНА | 2011 |
|
RU2483016C2 |
| СПОСОБ ОГРАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ КРАНА МОСТОВОГО ТИПА | 2007 |
|
RU2354604C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК | 1999 |
|
RU2159415C2 |
| СПОСОБ ОГРАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ ЭЛЕКТРИЧЕСКОГО КРАНА | 2006 |
|
RU2331572C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОЙ ИЛИ СТРОИТЕЛЬНОЙ МАШИНЫ (ВАРИАНТЫ) | 2010 |
|
RU2448037C1 |
| СПОСОБ ОГРАНИЧЕНИЯ ПАРАМЕТРОВ РАБОТЫ УСТРОЙСТВА | 2003 |
|
RU2255894C2 |
| Способ экспериментального определения жесткости канатного подвеса для кранов мостового типа | 2022 |
|
RU2803775C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 1997 |
|
RU2133453C1 |
