Изобретение относится к области стреловых гидроманипуляторов и может быть использовано при выполнении прочностных расчетов и оценке динамической устойчивости указанных машин.
Современной промышленностью выпускается достаточно большое количество высокопроизводительных и разнообразных по конструктивному исполнению и сложности стреловых гидроманипуляторов.
В связи со спецификой этого рода техники к ней предъявляются особые требования по обеспечению надежности.
Из числа проблем, связанных с решением этой задачи к наименее разработанным прежде всего следует отнести те, которые связаны с получением своевременной и достоверной информации о работоспособности элементов конструкции стреловых гидроманипуляторов и, особенно, о величинах и характере действующих на них динамических нагрузок, возникающих при работе в наиболее тяжелых условиях эксплуатации с полным (номинальным) грузом и по сути своей являющихся максимальными (предельными) силовыми характеристиками их рабочего состояния.
Динамические нагрузки реализуются в основном в периоды неустановившегося движения, например, при резком подъеме груза с жесткого основания со слабонатянутыми стропами грузовой подвески (подъем с подхватом) или мгновенном торможении опускаемого либо перемещаемого в окружном направлении груза и в ряде других случаев и носят случайный характер.
С учетом этих нагрузок производятся соответствующие оценки динамической устойчивости и прочностные расчеты стрелового гидроманипулятора в целом и отдельных элементов его конструкции.
При выполнении прочностных расчетов их обычно учитывают с помощью динамических коэффициентов и рассматривают как квазистатические.
Из отечественной и зарубежной технической литературы известен ряд экспериментальных и расчетно-аналитических способов определения динамических нагрузок, действующих в условиях эксплуатации на элементы конструкции стреловых гидроманипуляторов и других грузоподъемных машин, либо их комбинаций (см. "Справочник по кранам", том 1, 2. Под общей редакцией д-ра техн. наук, проф. М. М. Гохберга, М. , "Машиностроение", 1988 г. ББК 34.42Я2.С74. УДК 621.873 (031), ББК 39.12Я2. С74. УДК 621.873/.875 (031); "Вероятностные методы расчета грузоподъемных машин" Авт. В.И.Брауде. Л., "Машиностроение". Ленинградское отделение, 1978. , УДК. 519. 241.2: 621.873/.875; "Теория, конструкция и расчет строительных и дорожных машин" Под редакцией Л.А.Гобермана. М., "Машиностроение", 1979 г.).
В процессе экспериментов обычно посредством прямых тензометрических и других аналоговых измерений определяют фактические значения изменяющихся во времени сил, действующих на элементы конструкции испытуемого объекта, ускорений, угловых и линейных скоростей, перемещений кинематических звеньев и груза, давлений в гидроцилиндрах и других параметров (см. "Вероятностные методы расчета грузоподъемных машин". Авт.В.И.Брауде, стр.33 и др.).
Однако для получения необходимой информации таким способом требуется проведение натурных испытаний с использованием достаточно сложных и дорогостоящих измерительных систем (комплексов) и средств обработки результатов измерений.
Динамические нагрузки можно определить и различного рода расчетными методами, включая имитационный и др., посредством анализа процессов в соответствующей динамической системе, обычно описываемой дифференциальными уравнениями.
В основу имитационного метода определения динамических нагрузок положен системный подход, рассматривающий человека, машину и среду как единое целое (см. "Справочник по кранам", том 1. Под общей редакцией д-ра техн.наук проф. М. М. Гохберга. Стр.101). В соответствии с этим методом действия человека-оператора моделируют с помощью специальной программы, управляющей моделью крана. Кран или отдельный его механизм представляют в виде набранных на ЭВМ уравнений движения и зависимостей для определения усилий в расчетных сечениях элементов конструкции. Воздействия окружающей среды имитируют с помощью системы ограничений, начальных условий.
Работу крана и процессы нагружения его элементов моделируют посредством многократного решения на ЭВМ дифференциальных уравнений движения при случайных начальных условиях и параметрах динамической системы. При этом расчетные схемы и дифференциальные уравнения должны быть достаточно просты, так как с одной стороны, они предназначаются для определения статических осредненных характеристик нагрузок, а с другой - необходимости их многократного решения (моделируется до 50 и более циклов работы крана), что требует значительных затрат машинного времени или применения мощных аналоговых ЭВМ.
При проектировании новых грузоподъемных машин, имеющих эксплуатируемые аналоги, применяют комбинированные расчетно-экспериментальные методы определения характеристик динамических нагрузок.
Из числа известных аналогов изобретения ближайшим (прототипом) является способ определения динамических нагрузок по известным аналитическим зависимостям (формулам), связывающим скоростные, жесткостные и другие параметры грузоподъемной машины с уровнем искомых нагрузок (см. "Справочник по кранам", том. 1. Под общей редакцией д-ра техн.наук, проф. М.М.Гохберга. Раздел I. Глава 2. Параграф 1.8).
Недостатком указанного способа является сложность определения посредством соответствующих расчетов прямо или опосредованно используемых в аналитических зависимостях многих случайных факторов (зазоров в передачах и соединениях, массовых и геометрических параметров грузоподъемной машины, сил сопротивления, жесткостных характеристик кинематических звеньев и др.).
Влияние этих факторов может быть весьма существенным. Так, например, определенная экспериментально горизонтальная жесткость конца многозвенной стрелы опытного образца гидроманипулятора "Синегорец-25" разработки ЗАО "НК Уралтерминалмаш" оказалась более чем в 5 раз ниже расчетной, учитывающей только упругую податливость конструкции.
Задачей настоящего изобретения является упрощение способа определения динамических сил, действующих на элементы конструкции стреловых гидроманипуляторов при резком изменении скорости движения стрелы с подвешенным на ней при помощи гибкого звена грузом, основанного на использовании аналитических зависимостей, связывающих параметры элементов конструкции с уровнем определяемых нагрузок, и повышение достоверности получаемой при его использовании информации.
В соответствии с изобретением поставленная задача достигается тем, что согласно заявляемому способу в качестве параметров элементов конструкции используют предварительно определенные экспериментально фактические значения их массовых, геометрических, жесткостных и скоростных характеристик манипулятора, а динамические силы определяют по аналитическим зависимостям, приведенным ниже.
Сущность изобретения поясняется чертежами, где изображены:
на фиг. 1 - схема экспериментального определения жесткостных характеристик элементов конструкции стрелового манипулятора;
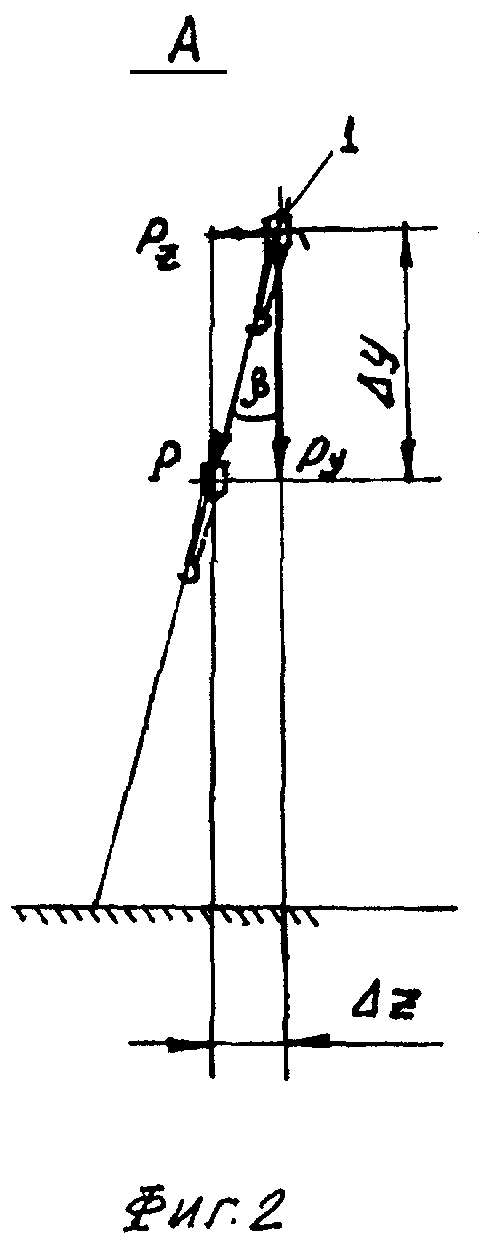
на фиг. 2 - вид А сбоку на стрелу гидроманипулятора при определении ее жесткостных характеристик;
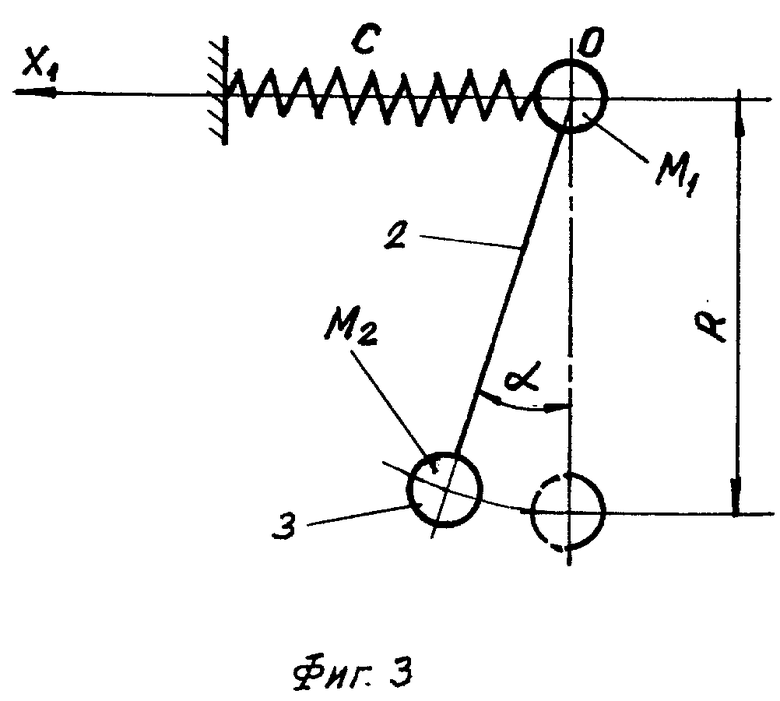
на фиг.3 - динамическая модель стрелового гидроманипулятора с двумя степенями свободы;
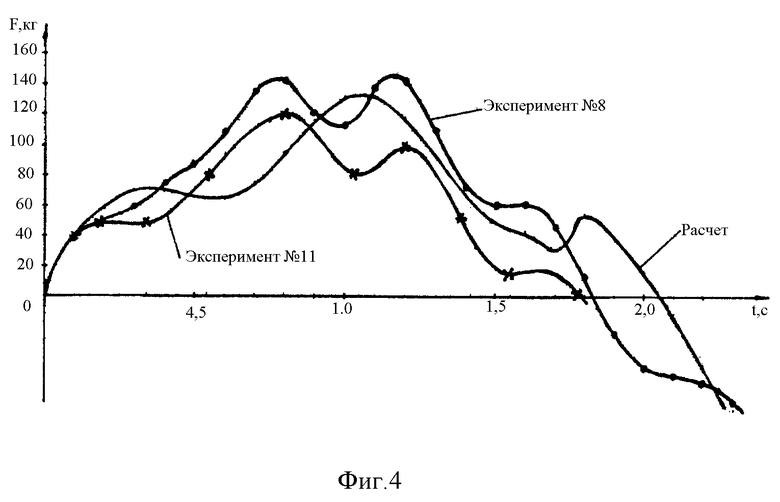
на фиг.4 - графическое изображение характера изменений по времени определенной с использованием заявляемого способа величины горизонтального динамического усилия, действующего на элементы конструкции стрелового гидроманипулятора, и полученной экспериментально посредством прямых тензометрических измерений.
Заявляемый способ определения динамических сил, действующих на элементы конструкции стреловых гидроманипуляторов при резком изменении скорости движения стрелы 1 с подвешенным на ней при помощи гибкого звена 2 грузом 3, основан на использовании аналитических зависимостей, связывающих параметры элементов конструкции с уровнем определяемых нагрузок.
В соответствии с заявляемым способом в качестве параметров элементов конструкции используют предварительно определенные экспериментально фактические значения их массовых, геометрических, жесткостных и скоростных характеристик, а динамические силы определяют по следующим аналитическим зависимостям;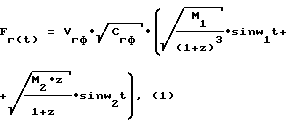
где Fг(t) - поперечная сила в зависимости от времени, Н;
Vгф - фактическое (измеренное) значение скорости груза в горизонтальной плоскости в момент его резкого торможения, м/с;
Сгф - фактическое значение жесткости конца стрелы гидроманипулятора, Н/м; - безразмерный коэффициент (параметр);
- безразмерный коэффициент (параметр);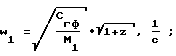
Значение динамической силы в месте крепления груза в вертикальной плоскости определяется известным соотношением
где Fв(t) - величина максимального динамического усилия в зависимости от времени, Н;
Vвф - фактическое (измеренное) значение скорости груза в вертикальной плоскости, м/с;
Свф - фактическая величина вертикальной жесткости конца стрелы, Н/м; - приведенная масса, кг;
- приведенная масса, кг;
J - момент инерции стрелы относительно оси вращения, кг • м2;
l - расстояние от точки крепления груза до оси вращения, м.
При определении фактических жесткостных характеристик элементов конструкции стреловых гидроманипуляторов статически нагружают (см. фиг.1, 2) усилием Р известной величины конец стрелы 1 и с помощью простейших механических мерительных инструментов фиксируют его перемещения (деформации ..Z, . . Y) в горизонтальной и вертикальной плоскостях. При этом максимальная величина нагружающего усилия в вертикальном направлении должна превышать усилие при определении жесткости в вертикальном и горизонтальном направлениях, поскольку колебания груза происходят относительно статического положения равновесия, соответствующего весу груза.
Жесткость мест крепления груза определяют как частное от деления величины прикладываемого к концу стрелы усилия Pz, Py на соответствующее значение перемещения (деформации ..Z, ..Y) его под действием этого усилия.
В качестве простейших механических мерительных инструментов при выполнении указанной операции используют линейку и отвес.
При определении фактических значений скоростей подъема, опускания и поворота груза вокруг оси 4 поворотной стойки 5 стрелового гидроманипулятора при установившемся режиме его движения фиксируют время прохождения грузом участка известной протяженности в линейном или угловом измерении при помощи простейших механических мерительных инструментов, а указанные скорости перемещения груза определяют как частное от деления величины пройденного грузом мерного участка на затраченное для его прохождения время.
При этом в качестве простейших механических мерительных инструментов при выполнении указанных операций используют линейку, отвес и секундомер.
Согласно заявляемому способу для определения динамических сил используют динамическую модель стрелового гидроманипулятора с двумя степенями свободы (см.фиг.3), в которой учитывают колебания груза на подвесе и колебания точки подвеса груза с приведенными к этой точке массой и жесткостью стрелы.
Для поворота стрелы гидроманипулятора дифференциальные уравнения движения имеют вид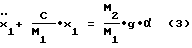
Начальные условия
Х1(о) = 0, ,
,
α(o) = 0,
где М1, М2 - приведенные к концу стрелы гидроманипулятора массы соответственно стрелы и груза, кг;
X1 - перемещение массы М1, м; - начальная скорость при торможении массы М1, м/с;
- начальная скорость при торможении массы М1, м/с; - ускорение массы М1, м/с2;
- ускорение массы М1, м/с2;
α - угол отклонения груза массой М2, приведенной к концу стрелы, рад; - начальная угловая скорость вращения груза массой М2 относительно конца стрелы, 1/с;
- начальная угловая скорость вращения груза массой М2 относительно конца стрелы, 1/с; - угловое ускорение груза массой М2 относительно конца стрелы, 1/с2;
- угловое ускорение груза массой М2 относительно конца стрелы, 1/с2;
О - начало координат;
С - приведенная к концу стрелы жесткость стрелы, Н/м;
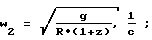
g - ускорение земного тяготения, м/с2;
R - расстояние от центра масс груза до точки его подвеса, м;
Vг - горизонтальная скорость конца стрелы гидроманипулятора в момент торможения, м/с.
Решение указанной системы дифференциальных уравнений (3) и (4) позволяет получить аналитическую зависимость (1) для определения поперечной динамической силы, реализуемой в процессе поворота стрелы гидроманипулятора вокруг оси стойки.
Достоверность аналитических зависимостей (1) и (2) аппаратурно подтверждена при динамических испытаниях опытного образца гидроманипулятора "Синегорец-25" разработки ЗАО "НК Уралтерминалмаш".
Сравнительные результаты величин и характера реализуемых при резком изменении скорости движения стрелы гидроманипулятора "Синегорец-25" с подвешенным на ней при помощи гибкого звена грузом динамических сил, полученных аналитически с использованием заявляемого способа и экспериментально, посредством прямых тензоизмерений, проводившихся при помощи специализированного измерительно-вычислительного комплекса, приведены на фиг. 4.
Из указанных графиков видно хорошее соответствие расчетных и экспериментальных данных.
Предлагаемый способ определения динамических сил несложен в реализации и не требует больших материальных затрат.
Проведенные ЗАО "НК Уралтерминалмаш" расчетно-теоретические и экспериментальные работы подтверждают возможность получения при осуществлении изобретения вышеупомянутого технического эффекта, заключающегося в упрощении способа определения динамических сил, действующих на элементы конструкции стреловых гидроманипуляторов при резком изменении скорости движения стрелы с подвешенным на ней при помощи гибкого звена грузом, и повышении достоверности получаемой при его использовании информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК | 1999 |
|
RU2159415C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 2000 |
|
RU2194258C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК | 2003 |
|
RU2269751C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| ОСНОВАНИЕ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА ГИДРОМАНИПУЛЯТОРА | 1996 |
|
RU2124470C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2123947C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2124447C1 |
Изобретение относится к стреловым гидроманипуляторам и может быть использовано при выполнении прочностных расчетов и оценке динамической устойчивости таких машин. Способ определения динамических сил, действующих на элементы конструкции стреловых гидроманипуляторов при резком изменении скорости движения стрелы с подвешенным на ней при помощи гибкого звена грузом, основан на использовании аналитических зависимостей, связывающих параметры элементов конструкции с уровнем определяемых нагрузок. В качестве параметров элементов конструкции используют предварительно определенные экспериментально фактические значения их массовых, геометрических, жесткостных и скоростных характеристик, а динамические силы определяют по соответствующим аналитическим зависимостям. Для определения динамических сил используют динамическую модель стрелового гидроманипулятора с двумя степенями свободы, в которой учитывают колебания груза на подвесе и колебания точки подвеса груза с приведенными к этой точке массой и жесткостью стрелы. Технический результат заключается в упрощении способа и повышении достоверности получаемой при его использовании информации. 5 з.п. ф-лы, 4 ил.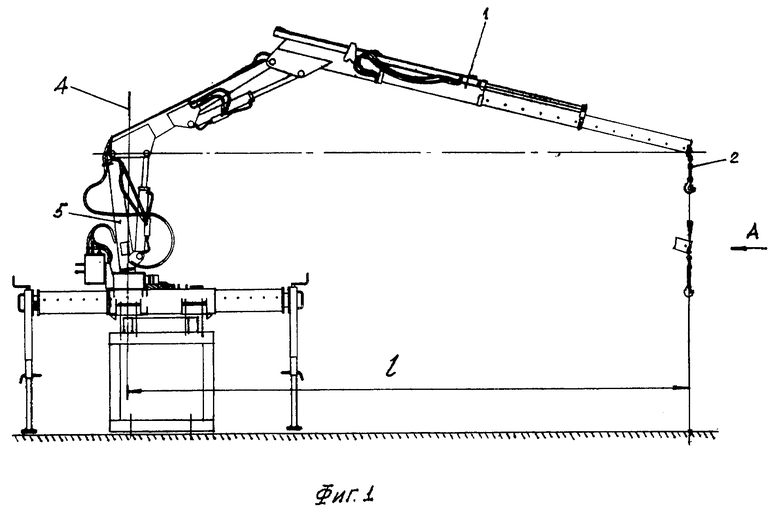

где Fг(t) - поперечная сила в зависимости от времени, Н;
Vгф - фактическое (измеренное) значение скорости груза в горизонтальной плоскости в момент его резкого торможения, м/с;
Cгф - фактическое значение горизонтальной жесткости конца стрелы гидроманипулятора, Н/м;
M1, M2 - приведенные к концу стрелы гидроманипулятора массы соответственно стрелы и груза, кг; - безразмерный параметр;
- безразмерный параметр;
g - ускорение земного тяготения, м/с2;
R - расстояние от центра масс груза до точки его подвеса, м;

где Fв(t) - величина максимального динамического усилия в зависимости от времени, Н;
Vвф - фактическое (измеренное) значение скорости груза в вертикальной плоскости, м/с;
Cвф - фактическая величина вертикальной жесткости конца стрелы, Н/м; - приведенная масса, кг;
- приведенная масса, кг;
J - момент инерции стрелы относительно оси вращения, кг•м2;
l - расстояние от точки крепления груза до оси вращения, м.
| Справочник по кранам, т.1 | |||
| / Под общей ред | |||
| д-ра техн.наук проф.М.М.Гохберга | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО НЕСУЩЕЙ СТОЙКИ ГИДРОМАНИПУЛЯТОРА | 1995 |
|
RU2091292C1 |
| RU 94018841 A1, 27.12.95. | |||

