Изобретение относится к области преимущественно гидроманипуляторной техники и других грузоподъемных машин со стреловым оборудованием и может быть использовано при оценке прочности элементов конструкции, динамической устойчивости, эксплуатационных возможностей и безопасности в целом машин рассматриваемого класса.
Указанные оценки обычно осуществляются расчетно-аналитическим путем либо базируются на результатах экспериментального определения динамических сил и моментов, реализуемых в конструкции гидроманипуляторов в периоды неустановившегося движения, например при резком подъеме груза с жесткого основания со слабонатянутыми стропами грузовой подвески (подъем с подхватом) или экстренном торможении опускаемого либо перемещаемого в поперечном направлении груза.
Существующие расчетно-аналитические методы определения динамических нагрузок предусматривают знание приведенных к концу стрелы массовых и жесткостных характеристик манипулятора, обычно определяемых методом расчета.
Из технической литературы известны методы расчетного определения и приведения жесткостей (податливости) элементов конструкции машин к точке подвеса груза на конце стрелы, в том числе и с учетом упругости жидкости в гидроцилиндрах ее подъема и опускания (см. Справочник по кранам, том 1, 2. Под общей редакцией д-ра техн. наук проф. М.М. Гохберга, М.: Машиностроение, 1988, ББК 34.42Я2. С74. УДК 621.873 (031), ББК 39.12Я2. С74. УДК 621.873/.875 (031); Теория, конструкция и расчет строительных и дорожных машин. Под редакцией Л. А. Гобермана. М.: "Машиностроение", 1979; Казак С.А. Динамика мостовых кранов. - М.: Машиностроение, 1968; Кашаров М.С. Динамика грузоподъемных машин. - Москва-Киев: Машгиз, 1962; Динамические нагрузки и устойчивость автокрана на упругом основании, авт. д-р, проф. Белградского унив-та, Югославия, P.P. Шелмич, УДК 621.873. 3.004.12: 629.11.073 в ж-ле "Строительные и дорожные машины" N4 за 1996, стр.32,33 и др.).
Однако, как показывают специально проведенные эксперименты, в реальных гидравлических системах манипуляторов при резком изменении скоростного режима движения стрелы с грузом имеет место увеличение динамического давления, обусловленное наличием различного рода клапанов, дросселирующих устройств и другой гидравлической аппаратуры. Помимо этого на жесткость стрелы существенное влияние оказывают люфты и зазоры, а также силы трения в сочленениях ее звеньев, что практически очень трудно, а иногда и невозможно оценить расчетом.
По этой причине в ряде случаев достоверно определить динамические нагрузки оказывается возможным только лишь экспериментальным методом.
Для грузоподъемных машин, используемых в тяжелых эксплуатационных режимах, такие работы в основном носят исследовательский характер и выполняются по особым программам. К числу их, прежде всего, относят натурные аппаратурные испытания, одной из основных задач которых является определение исходных данных по динамическим нагрузкам и напряжениям, необходимых для проверочных расчетов по методам допускаемых напряжений и предельных состояний, а также для расчетов долговечности и вероятности безопасной работы элементов конструкции и машины в целом (см., например, публ. Жуков А.В., Майко, М.П., Асмоловский М.И. Оценка показателей динамических процессов узкозахватной колесной валочной машины. - в "Известиях вузов", Лес.ж-л, 1992, N6, стр.53-58; Капе М. М. Экспериментальное исследование динамических нагрузок в зубчатых зацеплениях транспортной коробки передач. - в ж-ле "Вестник машиностроения", 1993, N14, стр.6-12; Брауде В.И. Вероятностные методы расчета грузоподъемных машин. - Л.: Машиностроение. Ленинградское отделение, 1978, стр.32-33).
При проведении таких испытаний для экспериментального определения динамических нагрузок и напряжений в деталях конструкции грузоподъемных машин наибольшее распространение получили способы измерения их, основанные на использовании тензометрических датчиков омического сопротивления, наклеиваемых соответствующим образом на поверхность указанных деталей в наиболее нагруженных местах (см., например, Электрические тензометры сопротивления. - М.: Мир, 1964, стр.301; К. Перри, Т. Лиссмер. Основы тензометрирования. М.: И-Л, 1957, стр. 234-242; Практическое применение тензорезисторов. - М.: Энергия, 1970, 6П2.1.083, Н50, УДК 531.787: 68/2,стр.94-124; Испытательная техника. Справочник в 2-х книгах. Под ред. д-ра техн. наук, проф. В.В. Клюева, Кн. 2. - М.: Машиностроение, 1982, ББК 34.4, И 88, УДК 621: 620.1.05(031), Гл.23).
Использование в конструкции ряда гидроманипуляторов гибких, например цепных, подвесок с захватным крюком, удерживающим груз при помощи строп, при резком изменении скоростного режима движения стрелы с грузом приводит к пространственным колебаниям груза на подвеске.
В случаях резкого подъема груза с жесткого основания при прослабленных в начальном положении стропах грузовой подвески (подъем с подхватом) и экстренного торможения опускаемого груза эти колебания реализуются в основном только в вертикальном направлении. В поперечном направлении при таком виде перемещения груза они весьма малы и их обычно не принимают во внимание.
При повороте стрелы вокруг продольной оси стойки гидроманипулятора характер движения перемещаемого груза на участке торможения в общем случае можно рассматривать как одновременные колебания его в двух направлениях - поперечном и вертикальном.
В связи с этим и динамические нагрузки, действующие в конструкции гидроманипулятора для этого случая, должны определяться одновременно в тех же самых направлениях.
Непосредственно перед проведением динамических испытаний обычно проводят статическую тарировку тензометрических датчиков со снятием зависимостей "нагружающая сила - выходной сигнал с датчика".
При этом, в первых двух случаях нагружение конца стрелы гидроманипулятора осуществляют, как правило, только вертикальной тарировочной (мерной) нагрузкой в диапазоне от нуля до максимума с фиксированием показаний тензометрических датчиков.
Указанная операция обычно не вызывает никаких затруднений, поскольку натяжной механизм с концевыми присоединителями ориентирован по вертикали, одним концом подстыкован к концу стрелы, а другим - к силовому элементу пола испытательного бокса и располагается в зоне досягаемости рук оператора.
В последнем же случае тарировку обычно производят отдельно по каждой из измерительных осей (в вертикальном и поперечном направлениях).
Однако такая тарировка в ряде случаев достаточно сложна в реализации и связана с большими временными и материальными затратами.
Указанные трудности обусловлены в основном тем, что стреловое оборудование большинства из известных гидроманипуляторов располагается на высоте нескольких метров от земли. В результате для закрепления натяжного механизма в горизонтальном (поперечном) направлении необходимы наличие соответствующей вертикальной силовой стенки и технологического устройства (промежуточной поддерживающей опоры), исключающего влияние на результаты тарировки собственного веса натяжного механизма.
Кроме того, такая схема тарировки неадекватно отражает реальную картину нагружения металлоконструкции гидроманипулятора, имеющего место при проведении динамических испытаний. Очевидно, что фактическая величина поперечной жесткости стрелового оборудования гидроманипулятора существенно зависит от трения, а также наличия люфтов (зазоров) в шарнирных или иных подвижных соединениях составных звеньев стрелы.
Без подвешивания на конце стрелы перемещаемого груза жесткость будет одной, а с подвешенным грузом - другой. Поэтому при проведении тарировки в поперечном направлении, помимо всего прочего, к концу стрелы необходимо подвешивать и перемещаемый груз, а это приводит к дополнительному усложнению испытаний.
Динамические испытания рассматриваемого типа обычно проводятся на полномасштабных действующих образцах отрабатываемой техники. При этом в ряде случаев бывают неизвестными фактические массово-центровочные характеристики стрелового оборудования гидроманипулятора. Поэтому входящие в состав аналитических зависимостей, используемых при испытаниях для определения коэффициентов динамичности, массовоцентровочные характеристики стрелового оборудования определяются, как правило, расчетным путем.
Однако реальные массово-центровочные характеристики могут отличаться от расчетных, а это существенно сказывается на достоверности получаемых известными способами результатов.
Задачей настоящего изобретения является упрощение способа экспериментального определения динамических нагрузок, сокращение временных и материальных затрат, связанных с его реализацией, и повышение достоверности получаемых при этом результатов.
В соответствии с изобретением поставленная задача достигается тем, что согласно заявляемому способу тензометрические датчики размещают на поворотной стойке и секциях стрелы гидроманипулятора в пространственно разнесенных и наиболее нагруженных сечениях так, чтобы одни датчики были чувствительными к воздействию нагрузок только в вертикальном направлении, а другие - в поперечном направлении. Перед испытаниями нагружают конец стрелы статической нагрузкой, вектор которой направлен под углом к вертикали в плоскости, проходящей через точку подвеса груза перпендикулярно стреле гидроманипулятора. Максимальная величина нагружающей силы должна превышать вес подвешенного груза.
При этом нагружение осуществляют в диапазоне от нуля до максимума с фиксацией показаний датчиков и определением зависимости "нагружающая сила - выходной сигнал датчика" в каждом сечении.,
Затем производят динамическое нагружение конструкции гидроманипулятора путем перемещения груза в заданном направлении с последующим резким торможением и фиксацией показаний датчиков, после чего, используя данные статической тарировки и динамических испытаний, определяют динамические силы, изгибающие моменты и коэффициенты динамичности в соответствующих сечениях по аналитическим зависимостям.
Сущность изобретения поясняется чертежами, где изображены:
на фиг. 1 - общий вид испытуемого гидроманипулятора;
на фиг. 2 - выносной элемент А, поясняющий схемы расположения тензометрических датчиков групп M1 (Rl, R2, R3, R4) и М2 (R5, R6, R7, R8) на выносной стреле гидроманипулятора;
на фиг. 3 - выносной элемент Б, поясняющий схемы расположения тензометрических датчиков групп М3 (R9, R10, R11, R12) и М4 (R13, R14, R15, R16) на подъемной стреле гидроманипулятора;
на фиг. 4 - выносной элемент В, поясняющий схемы расположения тензометрических датчиков групп М5 (R17, R18, R19, R20) на поворотной стойке опорно-поворотного устройства гидроманипулятора;
на фиг. 5 - схема мостового соединения датчиков группы М1;
на фиг. 6 - схема комбинированного нагружения конца стрелы гидроманипулятора статической нагрузкой Р;
на фиг. 7 - вид Г на стрелу гидроманипулятора с ее конца в процессе нагружения конструкции статической нагрузкой Р;
на фиг. 8 - схема, поясняющая характер одновременного действия на стрелу вертикальной и боковой составляющих Рy и Pz при нагружении ее статической нагрузкой Р, направленной под углом к вертикали;
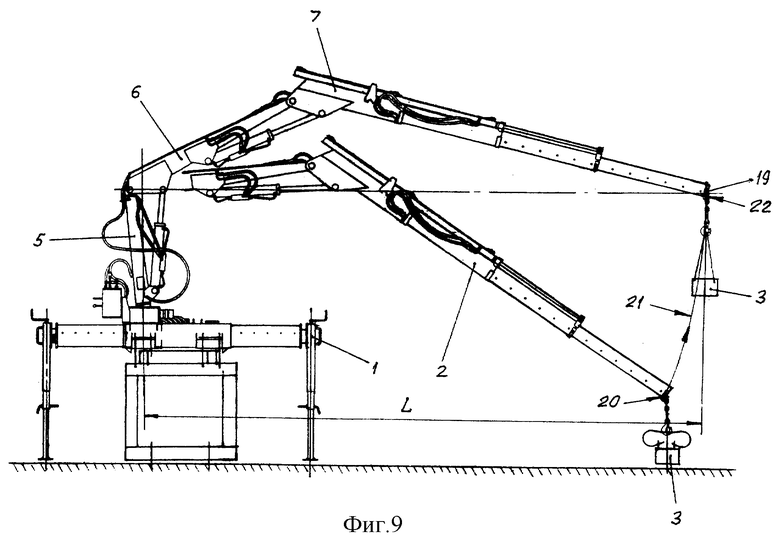
на фиг. 9 - схема, поясняющая метод проведения динамического испытания при резком подъеме груза с подхватом; L - общий вылет стрелы;
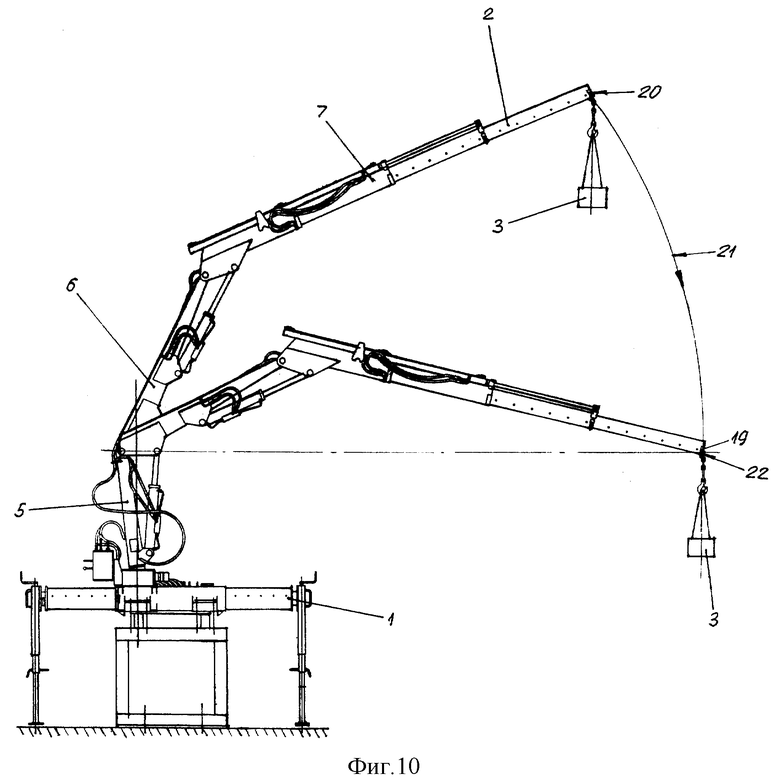
на фиг. 10 - схема, поясняющая метод проведения динамического испытания при опускании груза с последующим экстренным торможением его;
на фиг. 11 - схема, поясняющая метод проведения динамического испытания при повороте груза в горизонтальной плоскости с последующим экстренным торможением его;
на фиг. 12 - экспериментальная запись динамических показаний тензометрических датчиков групп М1 и М2 при резком подъеме груза с подхватом с последующим экстренным торможением его;
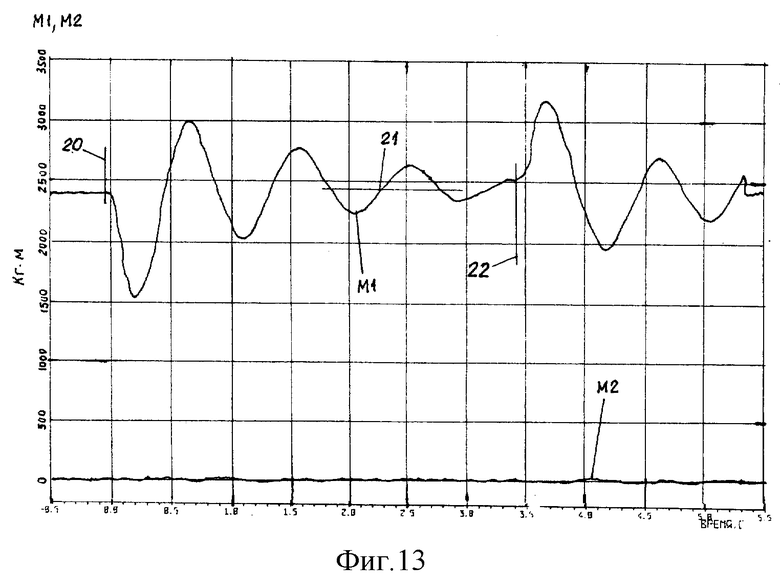
на фиг. 13 - экспериментальная запись динамических показаний датчиков групп М1 и М2 при опускании груза с последующим экстренным торможением его;
на фиг. 14 - экспериментальная запись динамических показаний датчиков групп М1 и М2 при повороте груза в горизонтальной плоскости с последующим экстренным торможением его;
Заявляемый способ экспериментального определения динамических нагрузок, действующих в подвижных элементах конструкции гидроманипулятора 1 при резком изменении скоростного режима движения его стрелы 2 с подвешенным на ней грузом 3, основан на использовании тензометрических датчиков 4 омического сопротивления.
Согласно заявляемому способу тензометрические датчики 4 размещают на поворотной стойке 5 и секциях 6, 7 стрелы гидроманипулятора в нескольких, пространственно разнесенных и наиболее нагруженных сечениях А (М1, М2), Б (М3, М4), В (М5) группами по четыре датчика для измерения каждого из моментов M1 (Rl, R2, R3, R4), М2 (R5, R6, R7, R8), М3 (R9, R10, R11, R12), М4 (R13, R14, R15, R16), М5 (R17, R18, R19, R20).
Тензометрические датчики 4 каждой из указанных групп наклеивают попарно на противоположные стороны силовых элементов конструкции гидроманипулятора и электрически объединяют в соответствующую мостовую схему, питаемую напряжением Vn.
Для приклейки тензометрических датчиков групп М1 и М3 используют верхние и нижние поверхности 8, 9 и 10, 11 подъемной и выносной секций 6, 7 стрелы 2 гидроманипулятора с ориентацией датчиков в продольном направлении.
Тензометрические датчики групп М2, М4 размещают на боковых поверхностях 12, 13 и 14, 15 тех же самых секций 6, 7 стрелы 2 с ориентацией вдоль нейтрали 16.
Тензометрические датчики групп М5 располагают в плоскости действия изгибающего момента на сжимаемой и растягиваемой поверхностях 17 и 18 поворотной стойки 5 опорно-поворотного устройства гидроманипулятора с ориентацией их в продольном направлении.
В результате тензометрические датчики 4 групп М1, М3, М5 оказываются чувствительными к воздействию нагрузок только в вертикальном направлении, а групп М2, М4 - поперечном направлении.
Балансировкой мостов при отсутствии нагрузки в элементах металлоконструкции гидроманипулятора можно исключить постоянную составляющую выходного сигнала Vc с датчиков каждой из вышерассмотренных групп, например при резком подъеме груза 3 с подхватом (см. фиг. 9).
Можно также сбалансировать мосты тензометрических датчиков не при нулевой, а при какой-то фиксированной нагрузке, что дает возможность измерять относительный момент, например, при резком опускании или повороте груза в горизонтальной плоскости с последующим экстренным торможением его (см. соответственно фиг. 10 и 11).
В соответствии с заявляемым способом, перед динамическими испытаниями нагружают конец стрелы статической нагрузкой Р. Вектор этой нагрузки направлен под углом к вертикали в плоскости, проходящей через точку 19 подвеса груза 3 перпендикулярно стреле 2 гидроманипулятора 1.
Максимальная величина нагрузки Р должна превышать вес перемещаемого груза. При этом нагружение конца стрелы осуществляют в диапазоне от нуля до максимума с фиксацией показаний тензометрических датчиков групп М1, М3, М5 и М2, М4, реагирующих соответственно на воздействие только вертикальной составляющей Рy и поперечной составляющей Pz нагрузки Р, и определением зависимостей "нагружающая сила - выходной сигнал тензометрического датчика Vci" в каждом сечении.
Затем производят динамическое нагружение конструкции гидроманипулятора путем перемещения груза 3 в заданном направлении с последующим резким торможением и фиксацией показаний тензометрических датчиков 4.
Ниже в качестве примеров приведены экспериментальные записи динамических показаний тензометрических датчиков М1, М2 при резком подъеме груза с подхватом (фиг. 12), опускании (фиг. 13) и повороте его в горизонтальной плоскости с последующим экстренным торможением (фиг. 14).
Из указанных записей видно, что в первых двух случаях (см фиг. 12, 13) тензометрические датчики группы М1 чувствительны к воздействию нагрузок только в вертикальном направлении. Из-за малости нагрузок в поперечном направлении выходной сигнал Vc с тензометрических датчиков группы М2 остается практически неизменным.
В последнем же случае (см. фиг. 14) тензометрические датчики обеих групп избирательно чувствительны к воздействию нагрузок как в вертикальном направлении (Мв), так и в поперечном (Мг).
Использовавшиеся при испытаниях тензометрические датчики уверенно фиксируют момент 20 трогания и участки установившегося движения 21 и резкого торможения 22 груза.
После этого, используя данные статической тарировки и динамических испытаний, определяют динамические силы, изгибающие моменты и коэффициенты динамичности в соответствующих сечениях по аналитическим зависимостям.
В расчетах на прочность принято определять максимальные силы или изгибающие моменты, действующие на элементы конструкции, с помощью умножения статических сил на коэффициенты динамичности. (Жуков А.В. Оценка показателей динамических процессов узкозахватной колесной валочной машины; Александров В.А. Динамические нагрузки в лесосечных машинах. Л.: изд. Ленинградского университета, 1984; Вайнсон Подьемно-транспортные машины. - М.: Машиностроение, 1989.
Выражение для коэффициента динамичности имеет вид:
где Fdi - динамическая сила, приведенная к i-му сечению, кгс;
Gгрi - вес перемещаемого груза, приведенный к i-му сечению, кг;
Gпсi вес стрел гидроманипулятора, приведенный к i-му сечению, кг.
Приведенные к i-му сечению силы представляют собой отношение изгибающего момента в i-м сечении (Mdi, Mгрi, Mci) от действия силы к расстоянию от точки подвеса перемещаемого груза до i-го сечения (Li):
Fdi=Mdi/Li; Gгрi=Mгрi/Li; Gпсi=Mci/Li.
Предлагаемый способ определения динамических нагрузок несложен в реализации и не требует больших материальных затрат.
Проведенные ЗАО "НК Уралтерминалмаш" специальные испытания гидроманипулятора "Синегорец-25" подтверждают возможность получения при осуществлении изобретения вышеупомянутого технического эффекта, заключающегося в упрощении экспериментального определения динамических сил, изгибающих моментов и коэффициентов динамичности, действующих в подвижных элементах конструкции гидроманипулятора при резком изменении скоростного режима движения стрелы с подвешенным на ней грузом, сокращении временных и материальных затрат, связанных с его реализацией, и повышении достоверности получаемых при этом результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 1997 |
|
RU2133453C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 2000 |
|
RU2194258C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК | 2003 |
|
RU2269751C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| ГРУЗОПОДЪЕМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 1999 |
|
RU2169694C2 |
| ОСНОВАНИЕ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА ГИДРОМАНИПУЛЯТОРА | 1996 |
|
RU2124470C1 |
| СТОЙКА ПОВОРОТНАЯ ГИДРОМАНИПУЛЯТОРА | 1996 |
|
RU2111162C1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2123947C1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2124447C1 |







Изобретение относится к области преимущественно гидроманипуляторной техники и может быть использовано при оценках прочности элементов конструкции, динамической устойчивости, эксплуатационных возможностей и безопасности в целом указанных машин. Тензометрические датчики омического сопротивления размещают на элементах конструкции гидроманипулятора в нескольких наиболее нагруженных сечениях так, чтобы одни из них были чувствительными к воздействию нагрузок только в вертикальном направлении, а другие - в поперечном направлении. Перед испытаниями нагружают конец стрелы статической нагрузкой. Затем динамически нагружают конструкцию гидроманипулятора путем перемещений груза в заданном направлении с последующим резким торможением. Используя результаты статической тарировки и динамических испытаний, определяют динамические нагрузки в соответствующих сечениях металлоконструкции по аналитическим зависимостям. Технический результат -упрощение способа, сокращение временных и материальных затрат при его реализации, повышение достоверности результатов. 2 з.п.ф-лы, 14 ил.
Fdi = Mdi/Li; Gгрi = Mгрi/Li; Gпсi = Mci/Li,
где Kdi - коэффициент динамичности, приведенный к i-му сечению;
Fdi - динамическая сила, приведенная к i-му сечению, кгс;
Gгрi - вес перемещаемого груза, приведенный к i-му сечению, кг;
Gпсi - вес стрел гидроманипулятора, приведенный к i-му сечению, кг;
Li - расстояние от точки подвеса перемещаемого груза до i-го сечения, м;
Mdi - экспериментально полученное значение динамического момента, приведенного к i-му сечению, кгм;
Mгрi - экспериментально полученное значение момента от веса перемещаемого груза, приведенного к i-му сечению, кгм;
Mci - экспериментально полученное значение момента от веса стрел гидроманипулятора, приведенного к i-му сечению, кгм.
| Справочник по кранам/Под общей редакцией д.т.н.проф.М.М.ГОХБЕРТА | |||
| - М.: Машиностроение, 1988, с.59-76 | |||
| ПОВОРОТНОЕ УСТРОЙСТВО НЕСУЩЕЙ СТОЙКИ ГИДРОМАНИПУЛЯТОРА | 1995 |
|
RU2091292C1 |
| RU 9401884 A1, 27.12.1995 | |||
| US 3490606 A, 20.01.1970. | |||
