Известны элем€.нты оравне -ия для автОматическОГо регулятора те.х.нологического пара.метра, .например .натяжения перематываемого материала, содержащие закрепленный на лопоротмо.м вал.ике задающий рычажо-к с роликом, обхваченным пе1ре.маты;ваемы1М .материалом, и укрепленный на оси, кинематически СБязан1Ной с упругнм элементом изменения уставки Параметра, индуктивный датчик с непод.вижныл магнитопроводом :И обмотками, вырабатывающи:ми электрический Сигнал, пропорциональный рассогласованию заданной и фактической величины контролируемого параметра.
Предла.гаемый элемент Сраанения с целью повышен.ия точности стабилизации технологического пара метра снабжен датч.иком, вырабатывающим электрический сигнал, пропорциональный первой производной от указанного рассогласова.ния, содержащим постоянный магнит и расположенную в его рабочем зазоре электрическую катущку с обмоткой, подключаемой к входу усилителя регулятора. Подвижный элемент датчика, например катушка, кинематически связан с задающим рычажком.
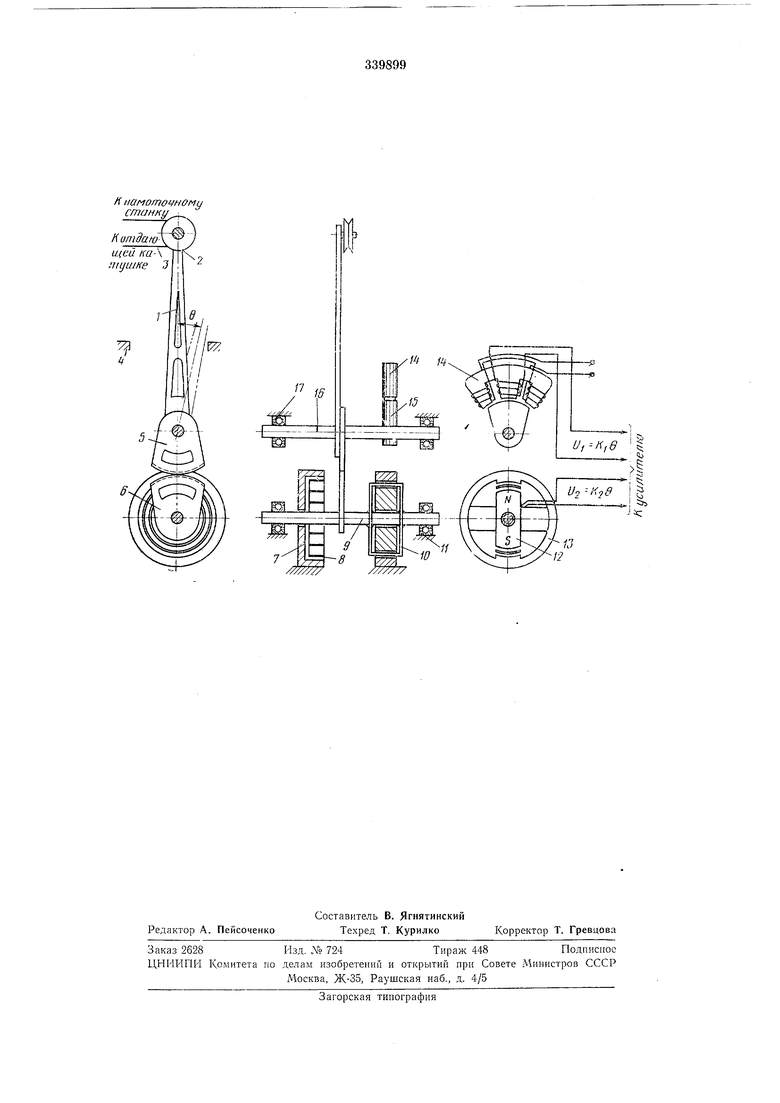
тываемым проводом 3, ограничительные уиоры 4, зубчатые секторы 5 и 6, барабан 7, спиральную пружину 8, ось 9, электрическую катущку 10, подшипники У/, постоянный магнит 12, .магнитопроводы 13 и 14, ротор 15 т дуктивтюго датчика, ось 16 и подшипники 17. Пр|И отсутствии рассогласования между фактическнм и за.дань;ым натяжением провода 3, задающий рычажок / находится между
ограничительньгми упорам.и 4 пр.имерно около нейтрали. Изменение фактического натяження провода, огибающего направляющий ролик 2 и поступающего к наматываемому изделию с иатяжиого элемента автоматического электронного регулятора натяжения, регистрируется отклонением задающего рычажка ,на угол ±в в зависимости от направления изменения натяжения. Через зубчатые секторы 5 и 6 задающий рычажок кинематически связан с
осью 9 и воспринимает вращающий момент калиброванной спиральной пружины 8, задающей требуемое натя:жение перематываемого ировода. Величина устанавливаемого натяжения легко регулируется величиной закрутки
спиральной пруж1И.ны, которая осуществляется посредством поворота барабана 7 на определенное число оборотов. Па оси 16 закреплен ротор 15 инду,ктивного дифференциальнотрансформаторного датчика электрического «с рассогласования зада.имого л факгичсского натяжения провода, амплитуда которого определяется 1величиной угла в отклопения задающегс рычажка от .исходного положения. На Ш-образном магнитолроводе М размещены s две встречно (включенные питающие и одна сигнальная обмотки. Напряжение на сигиаль«ой обмотке возникает за счет перераспределения магнитного потока питающих катущек при повороте ротора датчи ка па угол ±в от- lu нооительно .неподвижаюго мапштопровода 14. Сигнальная обмотка подключена к .входу усилителя. Электрический сигнал Uz K.2@, пропорциолальный первой производной от величины р.ас- 15 .со1гла|Со.вапия заданного и фактического .натяжения провода, вырабатывается электрической катуЩКОЙ 10. OiHa выполнена в виде легкой :малоинерц«онной рамки и жестко закреплена .па оси 9, квнематически связанной с за- 20 .дающим рычажком. Витки катущки пронизываются Магнитным силовым потоком постоян.ного магнита 12 и расположены в рабочем зазоре между полюсами магнита и магпитопро,во.да 13. Отклонение задающего рычажка при наличии рассогласования между фактическим и за.данным натяжением перематываемого провода вызывает поворот электрической катущки 10 вместе с осью 9. В.итки катушки, перемещаясь в рабочем зазоре относительно неподвижного постоянного магнита и магнитопровода, пересекают -магнитпые силовые линии. В результате витки развивают э. д. с. Uz K-i@, амплитуда которой пропорцио.наль:иа первой производной от величины из меряемого рассогласования. Полученный сигнал достаточно вел.ик и подается на вход усилителя автоматического электронного регулято.ра натяжения провода. Таким Об|разо.м, элемент сравнения регистрирует рассогласование между заданной и фактической велич.инами регулируемого технологического параметра .и (вырабатывает одновременно два электрических сигнала, необходи(мых для обеспечения достаточно высоких показателей переходного процесса регулятора. Аналогичная конст1рукция элемента сравнения может (применяться в автО(матических эл.ектронных регуляторах скорости перемещения раскладывающего устройства намоточного станка для обеспечения 1плотиой укладки витков многослойных катушек реле .и траисформатор.ов, основан.ной на использовании принципа самоукладки витков, или ща(говой укладки витков при изготовлении электроэлементов с заданным щагом между витками. В этом случае достаточно ра(звернуть ось вращения ролика 2 .и 90°, сО(Вместив тем самым плоскость ijpauiCHijiH ролика с аыоскостыо, (Перпендикулярной плоскости чертежа, и максимально ослабИть или изъять спиральную пружипу 8 с барабаном 7 (они Аюгут быть за1менены па два встречно включенных сигнальных волоска, контролирующих пулевое положение задающего рычажка /). Предлагаемый элемент сравнепия обеспечивает зпач.ительное повыщепие запаса устойчивости уже экоплуатируемых в промыщЛ6Ш10СТН и проектируемых автоматических электронных регуляторов технологического параметра без существенного изменения их электр.ической и кинематической схем. ЭффективПость элемента сравнения определяется те.м, что регул.ирован.ие по производны.м от ощибки -самостоятельно повышает точiHOCTb системы регулирования .даже в том слуlae, ко.гда ее общий коэффициент усиления сохра.пяется постоянным. При введении регулирования по производным система начинает чувствовать не только иал.ич.ие ошибки, но и тенденцию к изЛГенению ее величины. В результате а.вто(М1ат.ический электрон.ный регулятор технологического параметра процесса открытого перематывания материала более быстро реагирует на появление управляющих и возмущающ.их воздействий, -что снижает ошибку регулировали я и, следовательно, позволяет повысить качество .и производительность операции открытого перематывания материала. П р е (Д м е т и з о б р е т е н и я Элемент сравнения для автоматического регулятора технологического .параметра, например натяжепия перематываемого материала, содержащий закрепленный па поворотном валике задающий рычажок с роликом, обхваченным пер.ематываемьш материалом, и у.крепленный на оси, кинематически связанной с уп.ругим элементом иЗ(МененИя уставки параметра, индуктивный датчик (С неподвижным магнитопроводо(М и облютками, -вырабатывающ.ими электр.ический сигнал, пролорциопальный рассогл асованию зада.вной и фактической величины контролируемого параметра, отличающийся тем, что, с целью повышения точности стабилизации технологического параметра, он снабжен датчиком, вырабатывающим электр(ич,еский сигнал, цропорциопальный первой про.извод(ной от указанного рассогласования, соде ржащим постоянный .магнит и расположенную в его рабочем зазоре эле.кт.рическую катущку с (Об(моткой, подключаемой к входу усилителя регулятора, прич.ем подв.иж-ный элемент .датчика, .наприм.ер катущка, кинематически связан с задающим рычажком.
Л намоточноми cmaHt L

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД НАМАТЫВАЮЩЕГО УСТРОЙСТВА | 1973 |
|
SU386471A1 |
| Устройство для перематывания нитевидного материала | 1973 |
|
SU533537A1 |
| Устройство для намотки секций рулонных конденсаторов | 1980 |
|
SU900335A1 |
| Устройство для управления крутильно-мотальным механизмом ровничной машины | 1979 |
|
SU781229A1 |
| РЕГУЛЯТОР ПРЯДЕНИЯ | 1973 |
|
SU370290A1 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU302444A1 |
| Катушка переменной индуктивности | 1979 |
|
SU792299A1 |
| СПОСОБ СОЗДАНИЯ ЭЛЕКТРИЧЕСКОГО КОНТАКТА ЖИЛЫ | 1968 |
|
SU217479A1 |
| Устройство для намотки магнитопроводов | 1990 |
|
SU1749927A1 |