Известно устройство для управления роторным экскаватором, включающее интегрирующий механизм, усилитель, датчик производительности экскаватора, измеритель тока якорной цепи электродвигателя привода рабочего органа, релейный усилитель, реле, запоминающий механизм, фильтр, суммирующий элемент, задатчик производительности, узел коррекции задания нагрузки по среднему значению фактической производительности.
В предлагаемом устройстве, с целью регулирования производительности и повышения степени надежности устройства, его узел коррекции выполнен с блоком перемножения сигнала задания на отношение заданного и среднего значений производительпости, выход которого соединен с суммирующим элементом, а входы - с выходами запоминающих механизмов и одним из входов блока деления сигнала производительности, другой вход которого соединен с датчиком производительности экскаватора, а выход через и.о. контакт программного реле и запоминающий механизм- с одним из входов блока деления задания производительности, другой вход которого связан с задатчиком производительности, а выход через н. з. контакт программного реле - с входом запоминающего механизма.
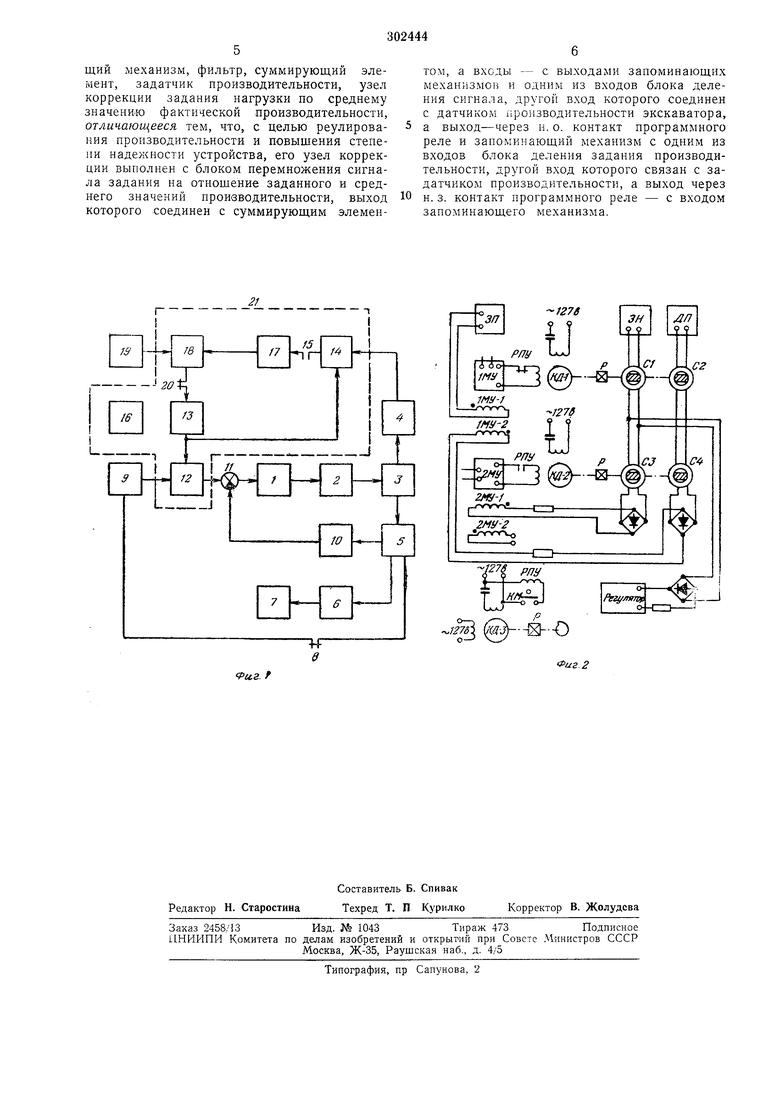
На фиг. 1 изображена блок-схема устройства для управлепия роторпым экскаватором; на фиг. 2 - принципиальная схема узла коррекции.
Интегрирующий механизм / через усилитель 2 соединен со входом объекта 3 регулирования, состоящего из электромеханических устройств приводов ротора и поворота экскаватора, взаимодействующих через экскавируемую породу и части конвейерпой линии до датчика производительности.
Один из выходов объекта регулирования соединен с датчиком 4 производительности экскаватора, а второй выход - с измерителем 5 тока якорной цепи электродвигателя привода ротора. Выходы измерителя 5 тока связаны через релейный усилитель 6 с катушкой реле 7, через н. з. контакт 8 реле 7- с входом запоминающего механизма 9 и через фильтр 10, сглаживающий высокочастотную составляющую в сигнале главной обратной связи, - с одним из входов суммирующего элемента 11, выход которого соединен с входом интегрирующего механизма /.
Другой вход суммирующего элемента 11 соединен с выходом блока 12 перемножения сигнала задания нагрузки на отношение заданного и фактического среднего значения производительности. Входы блока 12 связаны с выходами запоминающих механизмов 9 и
75 и с одним из входов блока 14 деления сигнала, пропорционального новому среднему значению фактической производительности, на отношение заданного и предыдущего среднего значения фактической производительпости, второй вход которого соединен с датчиком производительности, а выход через н. о. контакт 15 программного реле 16 - с входом запоминающего механизма 17.
Выход запоминающего механизма 17 связан с одним из входов блока 18 деления задающего сигнала на сигнал среднего значения фактической производительности, второй вход которого соединен с задающим устройством 19 производительности, например сельсинным командоаппаратом, а выход через н. 3. контакт 20 программного реле 16 - с входом запоминающего механизма 13.
Устройство для управления роторным экскаватором работает следующим образом.
После ввода рабочего органа экскаватора в забой при определенном значении нагрузки, возникщей на его приводе, срабатывает реле 7 и, размыкая свой н. з. контакт 8, переводит запоминающий механизм 9 в режим задатчика пагрузки. В случае отклонения среднего зпачепия фактической производительности экскаватора от заданного в блоке 18 задающий сигнал делится на сигнал, пропорциональный среднему значению фактической производительности, а результат деления через запоминающий механизм 13 поступает в блок 12 и перемножается с заданием нагрузки приводу ротора. После этого реле 16 программного управления н. з. контактом 20 отключает блок 18 от запоминающего механизма 13 па время, равное времени транспортного запаздывания сигнала в тракте измерения производительности. В результате коррекции задания нагрузки по производительности возникает сигнал рассогласования в суммирующем элементе 11, который преобразуется интегрирующим механизмом 1 в регулирующее воздействие, устраняющее это рассогласование. В блоке 14 новый сигнал, нолученный от датчика 4 производительпости в результате отработки устройством возникщей ощибки, делится на сигнал, поступающий с выхода запоминающего механизма 13. После размыкания н. з. контакта 20 и замыкания н. о. контакта 15 программного реле 16, результат деления в блоке 14 поступает через запомипающий механизм 17 в блок 18. Если новый сигнал датчика 4 производительности и сигнал задания производительности равны, то результат деления в блоке 18 останется без изменения; в случае их различия по величине после размыкания н. о. контакта 15 и замыкания н. з. контакта 20 ирограммного реле 16 произойдет новая коррекция задания нагрузки по производительпости.
рения фактической ироизводительности экскаватора.
Принциииальная схема устройства коррекции задания нагрузки по среднему значению фактической производительности состоит из двух электромеханических узлов (на фиг. I корректирующее устройство 21 обведено пунктирной линией).
Каждый узел содержит дифефренциальный
магнитный усилитель и конденсаторный электродвигатель типа РД-09, кинематически связанный через редуктор с двумя сельсинами. От диффереициальных магнитных усилителей 1МУ и 2МУ питаются соответственно обмотки управления двигателей К.и- и Ки-2.
Сигнал от датчика производительности Д/7 поступает через сельсины С2 и С4 на обмотку управления 1М.У2 и сравнивается с сигналом задания (обмотка 1МУ-) от задатчика производительности ЗЯ. Напряжение рассогласования отрабатывается конденсаторным электродвигателем КД-1. При этом сельсины С1 и С2 поворачиваются до тех пор, пока не сравняются ампервитки в указаниых обмотках. В результате поворота осуществляется деление задающего сигнала на сигнал, пропорциональный среднему значению фактической производительности, и умиожепие результата деления на сигнал задаПИЯ нагрузки, поступающего от задатчика нагрузки ЗН.
Периодичность коррекции, равная времени 1ранснортного запаздывания, задается программным реле РПУ, в цепи катущки которого срабатывает механический контакт КМ от кулачка, кииематически связанного через редуктор Р с валом двигателя КД-3. При размыкании н. з. контакта реле РПУ в цепи обмотки управлепия двигателя КД-1 запоминается сельсином С1 скорректированный сигнал задания нагрузки, поступающий на вход регулятора. Электродвигатели /СД-1 и КД-2: работают поочередно таким образом, что с увеличением угла поворота сельсинов
С/ и С2 настолько же уменьшается угол поворота сельсинов СЗ и С4 и, наоборот, за счет сравнения ампервитков в обмотках управления 2МУ-1 и 2МУ-2. (Обмотка 2МУ-2 подключена к неизменному напряжению, величина которого подбирается при наладке). Повый сигнал в обмотке 1МУ-2, полученный от датчика производительности в результате коррекции задания нагрузки по производительности, пройдя через сельсины С2 и С4,
будет равен заданию в обмотке 1МУ-. При их несоответствии произойдет новая операция коррекции.
Предмет изобретения
Устройство для управлепия роторным экскаватором, включающее интегрирующий мехапизм, усилитель, датчик производительности экскаватора, измеритель тока якорной цепи электродвигателя привода рабочего орщий механизм, фильтр, суммирующий элемент, задатчик производительности, узел коррекции задания нагрузки по среднему значению фактической производительности, отличающееся тем, что, с целью реулирования производительности и повышения степени надежности устройства, его узел коррекции выполнен с блоком перемножения сигнала задания на отношение заданного и среднего значений производительности, выход которого соединен с суммирующим элементом, а входы - с выходами запоминающих механизмов и одним из входов блока деления сигнала, другой вход которого соединен с датчиком производительности экскаватора, а выход-через и. о. контакт программного реле и запоминающий механизм с одним из входов блока деления задания производительности, другой вход которого связан с задатчиком производительности, а выход через н. 3. контакт программного реле - с входом запоминающего механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЬ[М ЭКСКАВАТОРОМ | 1971 |
|
SU304333A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Способ задания скорости поворотного механизма роторного экскаватора | 1979 |
|
SU910942A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| АВТОМАТИЗИРОВАННЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1969 |
|
SU257583A1 |
| Устройство для защиты стрелы экскаватора-драглайна | 1983 |
|
SU1194972A2 |
| Устройство управления электроприводом поворота стрелы роторного экскаватора | 1983 |
|
SU1165746A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДОМ ПОВОРОТА РОТОРНОГО ЭКСКАВАТОРА | 1973 |
|
SU368375A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
2f
fU-Z.
127& 6ш)---Й--О
о-
Фиг 2
