Изобретение относится к области автоматики и вычислительной техники.
Известны стенды для определения математической модели навигационных датчиков, содержаш,ие ЦВМ с подключенным к ней хронизатором, преобразователями, «код-частота, «код-напряжение, «сигнал-код и преобразователем «напряжение-код, ко входу которого подключены последовательно соединенные формирующий блок и генератор белого шума.
Однако эти устройства обладают низкой точностью измерения.
Предложенное устройство отличается тем, что оно содержит блок статистического анализа с коррелятором и узлами определения математического ожидания, дисперсии и закона распределения, входы которых соединены с выходом подключенного к ЦВМ преобразователя «код-напряжение. Причем вход испытуемого навигационного датчика соединен с выходом преобразователя «код-частота и со входом преобразователя «частота- код, а его выход через преобразователь «сигнал-код подключен к одному из входов ЦВМ.
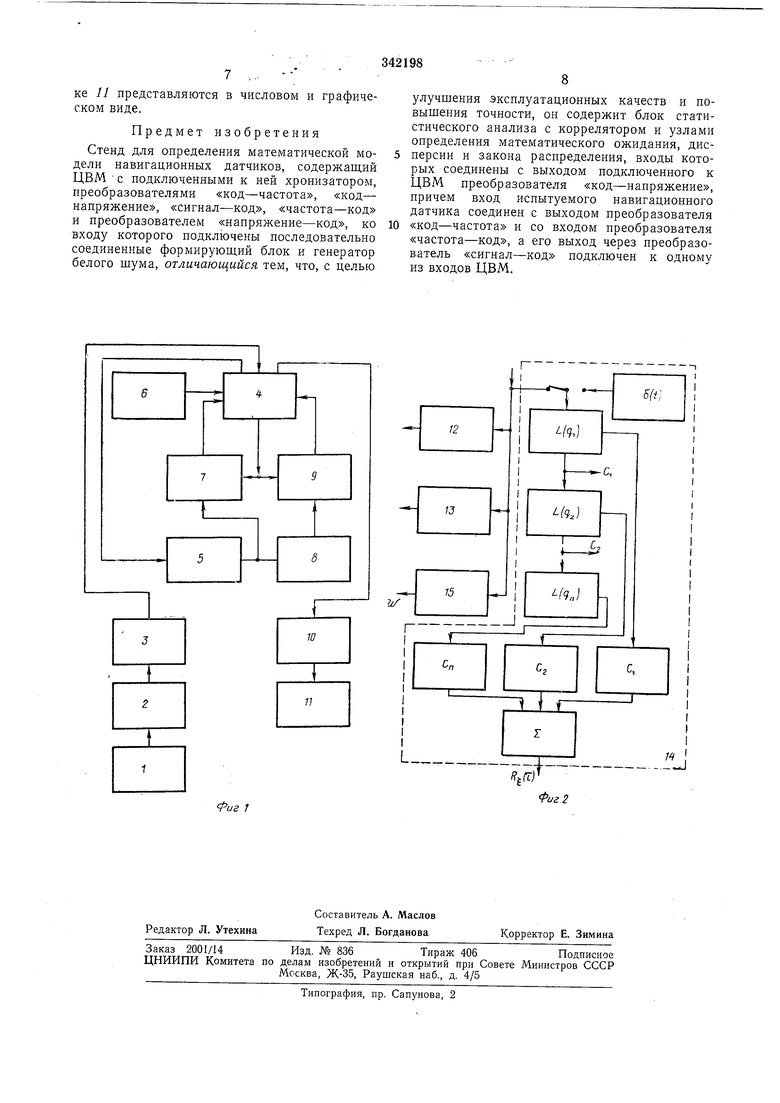
стотных навигационных датчиков; на фиг. 2 - структурная схема статистического анализа ошибок 8() и s.(t).
Определение динамических характеристик (импульсной переходной - k(t), передаточной- w(s) функций и запаздывания - т базируется на знании входного x(t) и выходного y(t) сигналов. Учитывая, что информативным параметром рассматриваемого класса навигационных датчиков является частота, выражения для этих сигналов можно представить в виде
x(t)F,(t), y(t)F,(t).
Для формирования входного воздействия служат генератор «белого шума /, формируюпа,ий блок 2, содержаш,ий, например, формируюш,ий фильтр и набор нелинейностей,
реализованные на базе решаюших блоков аналоговой вычислительной машины АВМ, преобразователь «напряжение-код 3, цифровая вычислительная машина (ЦВМ) 4. С помош,ью генератора / и формируюш,его
блока 2 можно формировать входное воздействие в виде случайного процесса с любой автокорреляционной функцией и любым законом распределения. ЦВМ 4 выдает это входное воздействие в та 5 преобразует его входной сигнал . задаваемый в диапазоне рабочих частот датчика. Дискретность выдачи Fss.k(t) определяется хронизатором 6. Для устранения влияния ошибок преобразователя «код-частота 5 сигнал вх(0 на его выходе измеряется высокочастотным электронным преобразователем «частота-код 7. Результат измерения /вхизмСО используется непосредственно для вычислений динамических характеристик навигационного датчика 8, сигналов ошибок в вычислении динамических характеристик &(t) и ошибок датчика S-e(0. Величина e(t) характеризует точность определения динамической модели, а е(/) - точность навигационного датчика. Преобразование выходного сигнала датчика 8 /вых(0 несущего информацию о частоте входного сигнала, осуществляется с помощью преобразователя «сигнал-код 9. В зависимости от типа выходного сигнала (напряжение, частота или код) преобразователь 9 реализует ту или иную формулу преобразования («напряжение-код, «частота- код или «код-код), представляя в коде значения /вых изм (г). На основании измеренных значений вхизм (О и / выхизм(0 в ЦВМ 4 с помощью специального алгоритма вычисляются k(t), w(s), т, e{t)Hs(t). Вычисление k(t), w(s) и т ведется с использованием методов, основанных на ортогональных разложениях. Использование ортогональных разложений позволяет представить в аналогически удобном виде входные и выходные сигналы вхизм(0 И выхизм(0 исследуемого объекта, а также его динамические характеристики во временной и частотной областях без решения характеристических уравнений в результате проведения достаточно простых вычислений. Основные положения алгоритма, позволяющего вычислять k{t), w{s) и т следующие. Импульсная переходная функция определяется в виде k(t}--k,,.Li(f), где gi - искомые коэффициенты; -j(О - ортогональные функции Лягерра; п - число членов разложения; А - масштабный коэффициент. Тогда передаточная функция может быть представлена в виде / -V {s) k,, ...- + ...-f.o /„ , bms + ... +b,еk - коэффициент сходимойп, йп, Ьт, Ьт - соответственно коэффициенты дробно-рационального представления w(s) без учета и с учетом запаздывания навигационного датчика. Коэффициенты gi могут быть вычислены рез моменты входных и выходных сигнав т)г и р,г И моменты ctj переходной функи: ,, Р-о 1 - Tjiap о - J -1 - , 0v;o - оСг - 25(iVii ,-3 - - Заду; Vi {tFnu.«,J(t)e -dt .„зм(0- Тогдаgi a.o - ka.i; gi y-« - 2/feai -f - .; :--а„-3/г.,.,, вязь между ап, Яп и т при использовании тода итераций и соотношений (II) предвляется в виде T TO±ATJ и , 1, 2, ...,n. оэффициенты ui и bi выражак)тся через gi ависимости от п и т. Например, при п т 3; k a, ,- g, u, (3g,-g,-g, + 3g,); «. (ЗЯо , 3g,) ; и, (§, + §, +8 +g,)k- b, При таком методе вычислений и при ограничении 3:-5 числами разложения точность определения k(t), w(s) и т составляет 1,0+ +3%, в то время как с помощью известных приборов точность не превышает 20-50%. 5 Необходимая точность вспомогательных вычислений в ЦВМ 4 (например, интегрирование дифференциальных уравнений) и преобразователей 7 и 5 составляет приблизительно ОД+0,3%, что достаточно просто реализует- 10 ся с помощью существующих ЦВМ и преобразователей. Выходной сигнал динамической модели y(t) датчика вычисляется в ЦВМ 4 в виде ,(V) где yi(t)-выходные сигналы динамических подмоделей, вычисляемые в соответствии со следующими дифференциальньши уравнениями: k У о - Х г У at г/1 Уо - у (У + Уо). Уп У -г - Y (Уп + )Ошибка в вычислении динамических характеристик - е определяется в ЦВМ 4 как разность сигналов y(t) и Рвы.1Ш1(). Ошибка датчика е() также вычисляется в ЦВМ 4 „, как результат сравнения сигналов ЕхдамСО и вых.измГО- Механизация среднеквадратного значения е() автоматически осуществляется в ЦВМ 4 за счет структурных вариаций алгоритма, соответствующих различным зна- .,, чениям k к п (п изменяется в пределах О-7, а k - в пределах, характеризующих практический частотный диапазон работы испытуемого датчика S). Сигналы 6(О и Г(0 выхода ЦВМ 4 через 45 преобразователь «код-напряжение 10 подаются на блок статистического анализа 11, где определяются математическое ожидание, дисперсия, корреляционная функция и закон распределения исследуемых сигналов. Блок // реализован на базе решающих блоков АВМ. Математические ожидания и дисперсии сигналов ъ(1 и е(/) вычисляются обычным образом с помощью узлов 12 и 13, входящих в состав блока /; (фиг 2). вычи- 55 сление корреляционных функций R(t) основано также на применении ортогональных разложений, где в качестве базисных используются экспоненциальные функции: ;(г)2С,1х), 15 25 (VI) „„ 5Q 60 65 Сначала, в момеиты прохождения исследуемого сигнала, в корреляторе 14 определяются коэффициенты разложения С. Затем со входа цепочки звеньев - операторов ортогональных экспоненциальных функций исследуемый сигнал отключается и подается сигнал б-функции. Реакции этих звеньев на сигнал б-функции с весами, пропорциональными Ci, суммируются на операционном усилителе (2), на выходе которого формируется электрический сигнал, пропорциональный корреляционной функции R (т). Законы распределения сигналов е(0 и е(/) определяются узлом 15, входящим в состав блока 11. Узел 15 содержит число каналов, равное числу интервалов, на которые разбивается исследуемый процесс. В результате работы узла 15 определяются вероятности попадания случайных величин в указанные интервалы разбиения. Каждый клапан узла 15 содержит амплитудный анализатор, схему антисовпадений и интегратор (на фиг. 2 не показаны). Два первых звена фиксируют факт нахождения сигнала в определенном интервале значений. Интегратор фиксирует время пребывания сигнала в этом интервале. Показания, считанные с интеграторов, дают ординаты функции распределения (плотности распределения вероятностей). При оперативном определении математической модели навигационного датчика стенд работает следующим образом. Сигналы с генератора «белого шума / через формирующий блок 2 и преобразователь «напряжение-код 3 поступают в ЦВМ 4. Частота опроса преобразователя 3 задается хронизатором 6. С этой же частотой задае ЦВМ 4 выдает в коде значения /вхл(0. лежащие в рабочем диапазоне навигационного датчика 8, которые поступают на преобразователь «код-частота 5. С выхода преобразователя 5 сигнал F(t) поступает на навигационный датчик 8. Преобразователи 7 и 9 синхронно подключают ЦВМ 4 ко входу и выходу датчика 8, измеряя сигналы и /вых(0- Измеренные значения .пзмСО и .измГО передаются в ЦВМ 4, которая производит вычисление коэффициентов Ьт, ап, Ьп, т, а также сигналов е(/) и 8(i). С помощью вычисленных коэффициентов получаются аналитические выражения для k(t}, (s) и численное значение t. Сигналы е(/) и 8() из ЦВМ 4 через преобразователь «коднапряжение 10 поступают в блок статистического анализа 11 с дискретностью, задаваемой хронизатором 6 и равной дискретности выдачи значений Fzy.k(t. В блоке статистического анализа // производятся вычисления математического ожидания (узел 12, дисперсии (узел 13), корреляционных функций (коррелятор 14} и законов распределения (узел 15. Результаты вычислений в бло1 ....
ке // представляются в числовом и графическом виде.
Предмет изобретения
Стенд для определения математической модели навигационных датчиков, содержащий ЦВМ С подключенными к ней хронизатором, преобразователями «код-частота, «коднапряжение, «сигнал-код, «частота-код и преобразователем «напряжение-код, ко входу которого подключены последовательно соединенные формирующий блок и генератор белого шума, отличающийся тем, что, с целью
улучшения эксплуатационных качеств и повышения точности, он содержит блок статистического анализа с коррелятором и узлами определения математического ожидания, дисПерсии и закона распределения, входы которых соединены с выходом подключенного к ЦВМ преобразователя «код-напряжение, причем вход испытуемого навигационного датчика соединен с выходом преобразователя
«код-частота и со входом преобразователя «частота-код, а его выход через преобразователь «сигнал-код подключен к одному из входов ЦВМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛИЗАТОР ДЛЯ КОНТРОЛЯ ХАРАКТЕРИСТИК ДИНАМИЧЕСКИХ СИСТЕМ | 1971 |
|
SU300875A1 |
| Система идентификации | 1975 |
|
SU744448A1 |
| БИВЛ;-'Ю | 1973 |
|
SU378898A1 |
| КОРРЕЛЯТОР | 1973 |
|
SU374607A1 |
| СПОСОБ ПРИЕМА ПАРАЛЛЕЛЬНОГО МНОГОЧАСТОТНОГО СОСТАВНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2207732C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩИХ СИСТЕМ | 1970 |
|
SU281601A1 |
| Цифровой релейный коррелятор | 1984 |
|
SU1229776A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕРОЯТНОСТНЫХ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ ПРОЦЕССОВ | 1973 |
|
SU432512A1 |
| УСТРОЙСТВО ДЛЯ ПРОГНОЗИРОВАНИЯ ПОСТЕПЕННЫХ ОТКАЗОВ ЭЛЕКТРОННЫХ ПРИБОРОВ | 1971 |
|
SU428361A1 |
| МНОГОКАНАЛЬНЫЙ ЦИФРОВОЙ КОРРЕЛОМЕТР | 1972 |
|
SU419895A1 |
Фиг 1
Фиг2
