Изобретение относится к измерительной технике, в частности к устройствам для измерения усилий, например, в проводке электрогидравлической системы управления самолета или пилотажного стенда.
Известен датчик усилия, состоящий из корпуса, силового упругого элемента, упругого чувствительного элемента и индукционного преобразователя поворотного типа, вращение которого осуществляется фасонной пружиной, воспринимающей измеряемое усилие.
Цель изобретения - обеспечение сменности силового упругого элемента в широком диапазоне жесткостей при одном и том же максимальном рабочем усилии и при сохранении чувствительности датчика.
Это достигается тем, что в предложенном датчике силовой упругий элемент выполнен в виде дифференциальной цилиндрической пружины с прямоугольным сечением витков и их встречной навивкой. Крайние концы пружины закреплены во внешней втулке, внутри которой расположен плавающий стакан, соединенный при помощи согласующей пружины с упругим чувствительным элементом, причем середина пружины силового упругого элемента присоединена к плавающему стакану.
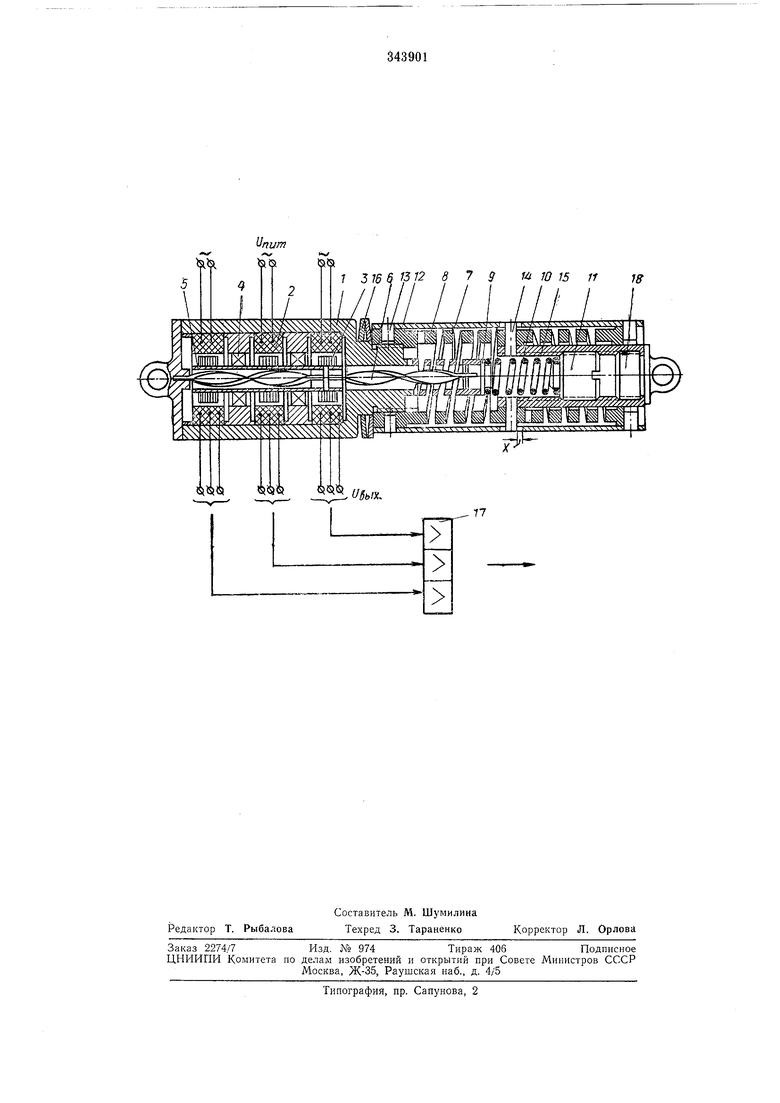
В корпусе 1 датчика вмонтированы статоры 2 и роторы 3 индукционного преобразователя поворотного типа, опорные подшипники 4 и втулка 5 роторов. Втулка 5 жестко соединена со средней частью упругого чувствительного элемента, выполненного в виде фасонной пружины 6 с -противоположно скрученными концами и натянутого дополнительной цилиндрической пружиной 7 сжатия.
Силовой упругий элемент состоит из цельноточеной дифференциальной цилиндрической пружины 8 с прямоугольным сечением витков и их встречной навивкой и связан с упругим чувствительным элементом 6 наконечником 9, согласующей пружины 10 и резьбовой пробки //. Крайние концы пружины 8 жестко соединены с внешней втулкой 12 посредством штифтов 13. Средняя часть ее, выполненная в виде замкнутого кольца, соединена штифтами-упорами 14 с плавающим стаканом 15.
Штифты-упоры 14 вместе с окнами во внешней втулке 12 образуют ограничитель предельной деформации силового упругого элемента.
Силовой упругий элемент сочленен с преобразователем резьбовым соединением, которое фиксируется тарельчатыми пружинами 16. Выходные обмотки преобразователя подклюравлической системы управления самолета. Датчик снабжен серьгами J8 для крепления его в проводке управления самолета.
Датчик работает следующим образом.
При действии на датчик внешней, например, растягивающей силы плавающий стакан 15 перемещается вправо, увлекая за собой через щтифты-упоры 14 среднюю часть силовой пружины, при этом Правые витки ее сжимаются, а левые растягиваются, и усилие передается корпусу 1 преобразователя с одной стороны через резьбовый фланец пружины непосредственно, а с другой - через внешнюю втулку 12.
При действии силы выше расчетной ход X штифтов-упоров 14 ограничен окнами во внешней втулке 12 и для пружин различной жесткости это значение X определяется и задается максимально действующим усилием.
Одновременно с плавающим стаканом 15 перемещается резьбовая пробка 11, которая ослабляет сжатие согласующей пружины Ю и соответственно пружины 7. При этом на фасонную пружину 6 действует больщее растягивающее усилие (по сравнению с первоначальным состоянием) и средняя часть ее поворачивается на некоторый угол. На этот же угол поворачивается втулка 5 и связанные с ней роторы 3 индукционного преобразователя. На выходе обмоток статоров 2 появляется Э.Д.С., пропорциональная углу поворота роторов и, следовательно, действующему усилию на датчик. С выхода преобразователей сигналы подаются па входы логических усилителей 17, включенных в контур системы управления с трехкратным резервированием.
Так как при настройке контура системы управления необходимо подбирать датчики различной жесткости, в предлагаемом датчике силовой упругий элемент легко снимается. Для этого предусмотрено резьбовое соединение с преобразователем, с помощью которого силовой элемент навинчен на резьбовую шейку корпуса / датчика до упора и для стабилизации соединения он подпружинен тарельчатыми пружинами.
Для сохранения расчетной чувствительности в комплект силового чувствительного элемента включена согласующая пружина 10, подобранная для каждой силовой пружины 8
отдельно. Кроме того, пружина 10 выполняег роль компенсатора температурных деформаций При изменении теплового воздействия на датчик.
Предмет изобретения
Датчик усилия, содержащий корпус, с размещенным в нем индукционным преобразователем, упругий чувствительный элемент, выполненный в виде фасонной пружины, и силовой упругий элемент, отличающийся тем, что, с целью уменьшения габаритов, повышения надежности и обеспечения сменности силового упругого элемента заданной жесткости, в нем корпус преобразователя соединен с подпружиненным силовым упругим элементом, выполненным в виде дифференциальной цилиндрической пружины с прямоугольным сечением витков и их встречной навивкой, концы которой закреплены во внешней втулке, а во внутренней лолости ее расположен плаваЮЩИЙ стакан, соединенный посредством резьбовой втулки и согласующей пружины с упругим чувствительным элементом, причем середина пружины силового упругого элемента в виде замкнутого кольца .присоединена к плавающему стакану штифтами-упорами, образующими вместе с окнами, выполненными во
внешней втулке, ограничитель предельной силы. (3 7 ЗЮ S ЗГ2 8 7 3 Ы Ю 15 11 jg
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЕКЦИОННЫЙ КОМБАЙН С УСТРОЙСТВОМ ДЛЯ УЧЕТА СОБРАННОЙ МАССЫ | 1992 |
|
RU2045149C1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1985 |
|
SU1301538A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УСИЛИЙ | 1972 |
|
SU351102A1 |
| ДАТЧИК-ИЗМЕРИТЕЛЬ МАЛЫХ КРУТЯЩИХ МОМЕНТОВ | 1999 |
|
RU2162217C1 |
| РЫХЛИТЕЛЬ МЕЛИОРАТИВНЫЙ | 1997 |
|
RU2113076C1 |
| АМОРТИЗАТОР НИЗКОРЕЗОНАНСНЫЙ | 2017 |
|
RU2660190C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1966 |
|
SU183978A1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ КОРНЕВИЩ КОРНЕОТПРЫСКОВЫХ СОРНЯКОВ, ПРЕИМУЩЕСТВЕННО КОРНЕЙ И КОРНЕВИЩ СОЛОДКИ, И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2160524C1 |
| Шагозадающее устройство к пружинно-навивочному автомату | 1983 |
|
SU1156785A1 |