1
Изобретение относится к оборудованию для навивки пружин и применяется в автоматах для холодной навивки пружин.
Цель изобретения - п:овышение качества пружин.
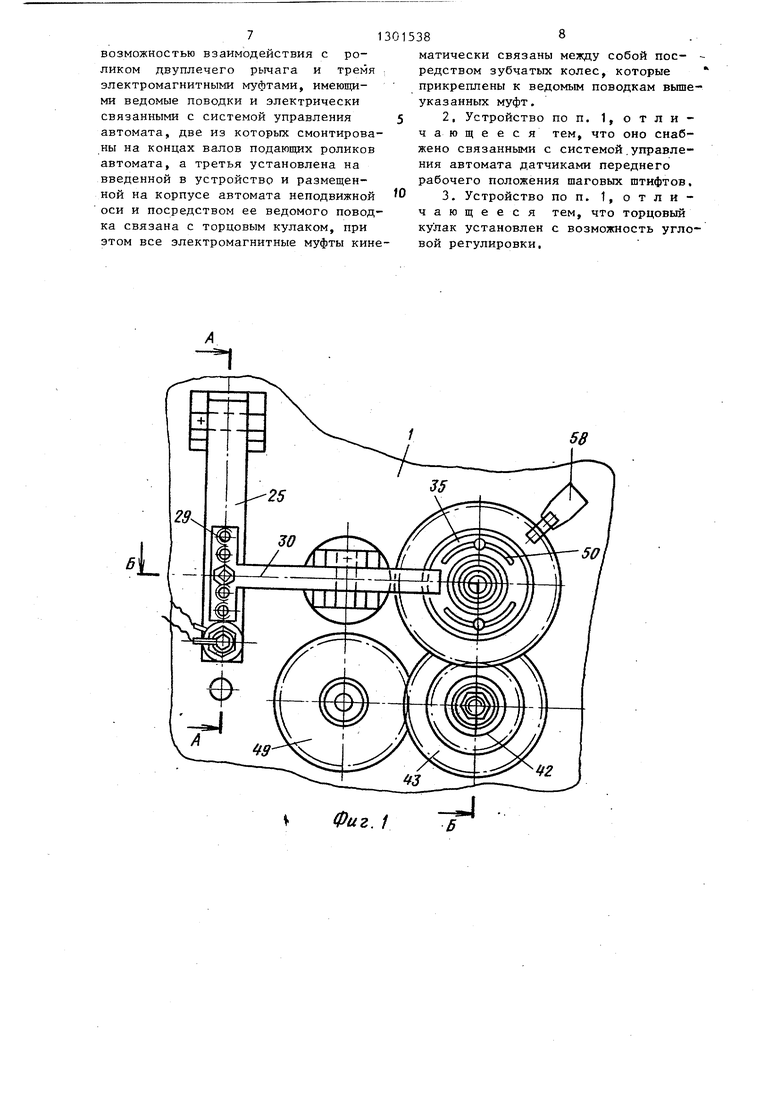
На фиг, 1 схематично изображено шагозадающее устройство, вид с противоположного торца валов подающих роликов; на фиг, 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б-на фиг, 1.
В корпусе 1 подвижно установлены штанги 2 и 3, соединенные между собой траверсой 4. На концах штанг закреплены шаговые штифты 5 и 6 с помощью одинаковых стаканов 7 и винтов 8, Б траверсу А между штангами посажен на шпонке до упора буртом шток 9, один торец которого контактирует с толкателем 10 приводного рычажного механизма, а во втором конце выполнен паз 11, в который входит плоский конец резьбового стержня 12, ввернутого во втулку 13 Втулка 13 свободно посажена в закрепленный в стенке корпуса 1 стакан 14, На втулку 13 на шпонке посажена звездочка 15, которая гибкой связью соединена со звездочкой 16, жестко посаженной на конец вала 17, на другой конец которого так же жестко посажена кнопка 18. Бал 17 свободно посажен в эксцентриковую втулку 19, фиксируемую в стенке корпуса гайкой 20,
На штанги 2 и 3 между стенками корпуса 1 и траверсы 4 установлены распорные пружины 21, обеспечивающие постоянный контакт между торцами штока 9 и толкателя 10, Толкатель 10 подвижно установлен в стакане 22 и своим буртом поджат к днищу стакана гайкой 23 через упругий элемент 24, Стакан 22 закреплен в конце рычага 25, второй конец которого шарнирно подвешен на оси 26, установленной в кронштейне 27, закрепленном на стенке корпуса 1,
Под действием пружин 21 задняя поверхность рычага 25 находится в постоянном контакте с торцом винта 28, ввернутого в одно из отверстий 29 на Т-образном конце двуплечего рычага 30. Отверстия 29 предназначены для изменения соотношения плеч на рычаге 25 между точками приложения сил от винта 28, оси подвеса рычага и оси толкателя 10, Рычаг 30
015382
поворотно установлен на оси 31, закрепленной в опоре 32, жестко связанной со стенкой корпуса 1. На втором плече рычага 30 на оси 33 уста- 5 новлен ролик 34, контактирующий постоянно с торцовым профилем ведущего кулака 35, посаженного на ступицу шестерни 36, в свою очередь закрепленную на ступице 37, которая
О посажена подвижно на конец оси 38, своим фланцем закрепленной на стенке корпуса 1.
На оси 38 на шпонке посажена электромагнитная муфта-тормоз 39,
диски которой поводком 40 и болтами 41 связаны с блоком, состоящим из ступицы 37, шестерни 36 и кулака 35, Шестерня 36 зацеплена с шестерней 42, жестко установленной на ступицу
шестерни 43, свободно посаженной на конец приводного вала 44, несущего на другом конце нижний подающий ролик 45, На этот же конец вала 44 перед шестерней 43 посажена на шпон- ке электромагнитная муфта 46, маг- нитопроводящая часть которой закреплена в крьш1ке-стакане 47. Диски муфты 46 и шестерня 43 связаны поводком 48. Шестерня 43 .зацеплена с шестер30 ней 49, свободно посаженной на конец второго приводного вала, также несущего на противоположном свободном конце нижний подающий ролик, На тот же конец вала, на котором сидит
35 шестерня 49, посажена электромагнитная муфта, аналогичная муфте 46, связь дисков которой с шестерней 49 осуществлена таким же, как поводок 4-8 поводком. На днище торцового ку40 лака 35 выполнены-два паза 50 для. регулировки исходного положения кулака. На конец штока 9 и резьбового стержня 11 установлены датчики 51, связанные с электроуправлением. В
45 гайку 23, выполненную из электроизоляционного материала, встроено предохранительное устройство, состоящее из бронзовой резьбовой втулки 52, стержня 53, имеющего головку и вы50 полненного из электроизоляционного материала, пружины 54 и двух пластин 55 и 56, одна из которых зажата между гайкой 23 и резьбовой втулкой 52, а вторая между двумя гайка55 ми 57, Пружина 54 обеспечивает контакт между гайкой 57 и резьбовой втулкой 52. Пластины 55 и 56 электропроводкой связаны с электроуправлением автомата, К стенке корпуса прикреплен датчик 58 исходного положения кулака 35,
Предлагаемое устройство работает следующим образом,
В зависимости от положения шаговых штифтов по отношению к линии подачи проволоки на автоматах навиваются пружины без зазора между витками Тпружины растяжения) и пружины с зазором между витками, т.е. пружины с шагом, превышающим диаметр проволоки (пружины сжатия), для навивки которых и предназначается щагозадающее устройство. При навивке пружин сжатия с поджатыми (опорными) крайними витками после навивки первого поджатого витка шаговый штифт за время навивки следующего витка выдвигается вперед в рабочее положение и, взаимодействуя с навиваемой проволокой, образует начальный передний виток, а затем остается в рабочем положении в процессе навивки рабочих витков. По окончании навивки рабочих витков шаговый штифт за время навивки одного витка отходит назад, образуя конечный переходной виток, а последний. Поджатый виток, навивается без воздействия шагового штифта. Дпя навивки правозаходных пружин предназначен шаговый штифт 5, лево- заходных - шаговый штифт 6,
Выдвижение шаговых штифтов вперед в рабочее положение со штангами 2 и 3, траверсой 4 и штоком 11 осуществляется от рабочего проворо- та ведущего кулака 35 через ролик 34, переходящий с меньшей высоты на большую по винтовой поверхности, двуплечий рычаг 30, винт 28, рычаг 25 и толкатель 10, при условии, что жесткость упругого элемента 24 буг
дет выше технологического сопротивления и распорного усилия пружин 21 Возврат в исходное положение проис- ,ходит под действием пружин 21 при реверсивном провороте кулака 35,
Устройство работает по следующему циклу.
При включении подачи приводные валы 44 подающих роликов 45 начинают вращаться (нижние против часовой стрелки, верхние - по часовой, - фиг, 1). Ролики начинают подавать проволоку. При этом муфты 46 остаются выключенными, а муфта-тормод 3 включенной, поэтому кулак 35 остается неподвижным. После того, как
будет подана длина проволоки, необходимая для образогания под атого (опорного) витка, от командоаппара- та или системы программного управления подается команда на отключение муфты-тормоза 39 и включение муфты 46 на правом валу. Шестерни 43, 42, 36 и 49 начинают проворачиваться и вместе с шестерней 36 проворачивается по часовой стрелке кулак 35, который своим спиральным торцовым профилем воздействует на ролик 34 и поворачивает рычаг 30 вокруг оси 31, Винт 28 поворачивает относительно
оси 26 рычаг 25, и толкатель 10 приводит в поступательное движение вперед шток 9 с траверсой 4 и штангами 2 и 3, Шаговый штифт, воздействуя при движении вперед на проволоку,
образует переходный виток. Шток 9 будет идти вперед до тек пор, пока не придут в соприкосновение контакты датчика 51 и система злектроуправ- ления отключит муфту 46 и включит
муфту-тормоз 39, при этом кулак 35 и все шестерни остановятся, а шаговый штифт останется в переднем рабочем положении, задавая шаг навиваемой пружине.
После навивки заданного числа витков система управления отключает муфту-тормоз 39 и включает электромагнитную муфту 46 на левом (фиг.1) подающем валу и шестерня 49 через
шестерни 42, 43 и 36 проворачивает кулак 35 в обратном, реверсивном направлении против часовой стрелки до тех пор, пока не сработает дат- чие 58, который отключит муфту 46
на левом валу и включит муфту-тормоз 39. При реверсивном провороте кулака 35 под действием пружин 21 ;система штифт, штанги, траверса и шток отойдет назад в исходное положение. При этом шаговый штифт образует конечный переходный виток. При остановке кулака 35 подающие ролики 45 продолжают подачу, образуя конечный опорный виток без шага, а
затем ролики 45 останавливаются системой управления автомата, и цикл навивки пружины заканчивается.
При навивке следующей пружины цикл повторяется.
Регулировка исходного положения шаговых штифтов по отношению к проволоке осуществляется винтами 28 и может быть выполнена с любой точностью, т.е. штифты по отношению к
проволоке могут быть доведены до касания их поверхностей или с зазором в десятые доли миллиметра. Этим же винтом можно изменить величину выхода шаговых штифтов при одном и том же угле поворота кулака 35, вворачивая винт в то или другое отверстие 29 на рычаге 30, в зависимости от отношения шага к диаметру пружины .
При больших отношениях винт-28 вворачивается в верхние отверстия 29 с уменьшением отношения - в нижние, тем самым меняется соотношение плеч на рычаге 25, Регулировка переднего положения осуществляется осевыми перемещениями резьбового стержня 12 за счет прокручивания резьбовой втулки 13 кнопкой 18 через вал 17, звездочки 16 и 15 и цепную передачу между ними. При регулировке изменяется исходный зазор между контактами датчика 51 и просвет 11 между дном паза в штоке 9 и торцом плоского конца резьбового стержня 12 за счет прокручивания резьбовой втулки 13 кнопкой 18 через вал 17, звездочки 16 и 15 и цепную передачу между ними. При регулировке изменяется исходный зазор между контактами датчика 51 и просвет 11 между дном паза в штоке 9 и торцом плоского конца резьбового стержня 13, При этом исходное положение контактов датчика 51 обеспечивает легкое касание торца и дна или зазор в десятые доли миллиметра после остановки хода штифтов вперед в рабочее положение,
Регулировка (подстройка) переднего положения может быть осуществлена без остановки автомата.
При необходимости может быть отрегулировано исходное положение кулака 35 за счет его проворота относительно шестерни 36 и положение датчика 58,.
В случае несрабатывания схемы управления от датчика 51 отключение электроуправления обеспечит предохранительное устройство, так как произойдет жесткий контакт между торцом резьбового стержня 12 и штока 9, сжатие упругого, элемента 24 с контактом между торцом толкателя 10 и головкой стержня 53, разрыв контакта гайки 57 с резьбовой втулкой : 52 и, следовательно, разрыв цепи уп- равления автоматом.
Применение в шагозадагощем устройстве пружинонавивочного автомата,- управляемых электромагнитных муфт и шестерен, устанавливаемых на концы двух валов роликов подачи проволоки, приводящих в реверсивные про- вороты с выстоями спиралеобразный торцовый ведущий кулак перемещения шаговых штифтов, в сочетании с датчиками и ограничивающим упором перед- него рабочего положения штифтов обеспечивает стабильность и точность перемещения штифтов и стабильность выстоя его в переднем рабочем положении при остановленном кулаке.
Стабильность рабочего перемещения штифтов и их выстоя в процессе навивки прзтаины обеспечивает зависящую от/шагозадающего устройства
стабильность шага пружин и, следовательно, их качество. Осуществление перемещения шаговых штифтов через систему электромуфт, шестерен, кулака и двух рычагов непосредственно
от валов i на которых установлены ролики подачи проволоки, упрощает кинематические связи в автомате, так как отпадает необходимость согласования скорости вращения распределительного вала со скоростью вращения валов роликов подачи проволоки для каждого типоразмера пружин, Подобная конструкция шагозадающего устройства может быть использована как
в обычном автомате, так и в автомате с программным управлением.
Формула изобретения
1 . Шагозадающее устройство к пру- жинонавивочному автомату с подаю- ш;ими роликами и системой управления, содержащее установленные в корпусе с возможностью осевого перемещения
и связанные траверсой две подпружиненные штанги, на концах которых закреплены шаговые штифты, размещенный параллельно штангам и связанный с ними траверсой шток с упорным торцом, установленный с возможностью взаимодействия с упорным торцом, подвешенный на шарнирной опоре одноплечий рычаг и установленный с возможностью взаимодействия с одноплечим рычагом, приводной двуплечий рычаг с роликом, отличающееся тем, что, с целью повышения качества пружин, оно снабжено торцовым кулачком, установленным с
возможностью взаимодействия с роликом двуплечего рычага и тремя электромагнитными муфтами, имеющими ведомые поводки и электрически связанными с системой управления автомата, две из которых смонтированы на концах валов подающих роликов автомата, а третья установлена на введенной в устройство и размещенной на корпусе автомата неподвижной оси и посредством ее ведомого поводка связана с торцовым кулаком, при этом все электромагнитные муфты кине1538
матически связаны между собой псе- редством зубчатых колес, которые прикреплены к ведомым поводкам вышеуказанных муфт.
с 2, Устройство по п. 1, о т л и - чающееся тем, что оно снабжено связанными с системой.управления автомата датчиками переднего рабочего положения шаговых штифтов,
fO 3. Устройство по п. 1, отличающееся тем, что торцовый ку лак установлен с возможность угловой регулировки,
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для навивки пружин | 1976 |
|
SU565761A1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1974 |
|
SU528990A1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1976 |
|
SU578145A1 |
| Автомат для навивки пружин | 1978 |
|
SU776725A1 |
| Шагозадающее устройство к пружинно-навивочному автомату | 1983 |
|
SU1156785A1 |
| Автомат для навивки пружин | 1975 |
|
SU599896A1 |
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
| Станок-автомат для изготовления плетеной металлической сетки | 1957 |
|
SU118800A1 |
| Устройство для изготовления спирали | 1980 |
|
SU925491A1 |
| СТАНОК-АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПЛЕТЕНОЙ МЕТАЛЛИЧЕСКОЙ СЕТКИ | 1968 |
|
SU212980A1 |

Изобретение относится к оборудованию для навивки пружин и применяется в автоматах для холодной навивки пружин, Целью изобретения является повышение качества пружин, Шагозадающее устройство к пружинонавивочному автомату с подаюпщми роликами и системой управления со держит установленные в корпусе с возможностью осевого перемещения две подпружиненные штанги, связанные траверсой. На концах штанг закреплены штанговые штифты, В корпусе параллельно штангам размещен шток с упорным торцом, .который связан со штангами траверсой. На шарнирной опоре подвешен одноплечий рычаг, с которым взаимодействует приводной двуплечий рычаг с роликом, взаимодействующим в свою очередь с торцовым кулачком. Торцовый кулачок взаимодействует с тремя электромагнитными муфтами, связанными- с системой управления автоматом. Все электромагнитные муфты кинематически связаны между собой посредством зубчатых колес. 2 з,п, ф-лы, 3 ил. а S (Л 03 о от 00 00
5
иг. 1
8
26
Т7/ / sl
ZZ2if2353
Фиг.2
ffS
в- Б
Составитель Б. Бужинский Редактор Н, Егорова Техред И.Попович
Заказ 1177/11 Тираж 583Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
«««..----------- --------- - -- ™ -
Производственно-полиграфическое предприятие, г. Ужгород, ул.Проектная, 4
Корректор А. Зимокосов
| Шагозадающее устройство к пружинно-навивочному автомату | 1983 |
|
SU1156785A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
