1 5 7 52
# // 45 5
Изобретение относится к машиностроению и может быть использовано для автомагической загрузки и выгрузки деталей, например, в агрегатных станках.
Цель изобретения - упрощение конструкции путем уменьшения кинематических цепей при обеспечении функциональных перемещений звеньев манипулятора от одного привода.
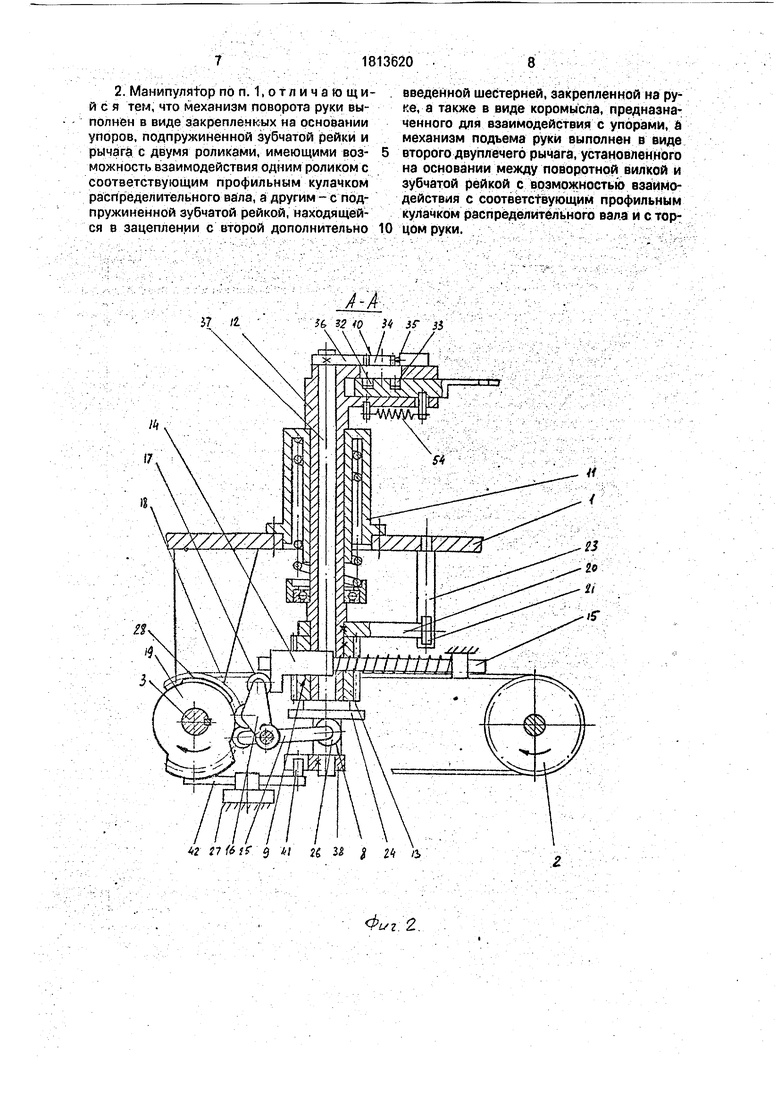
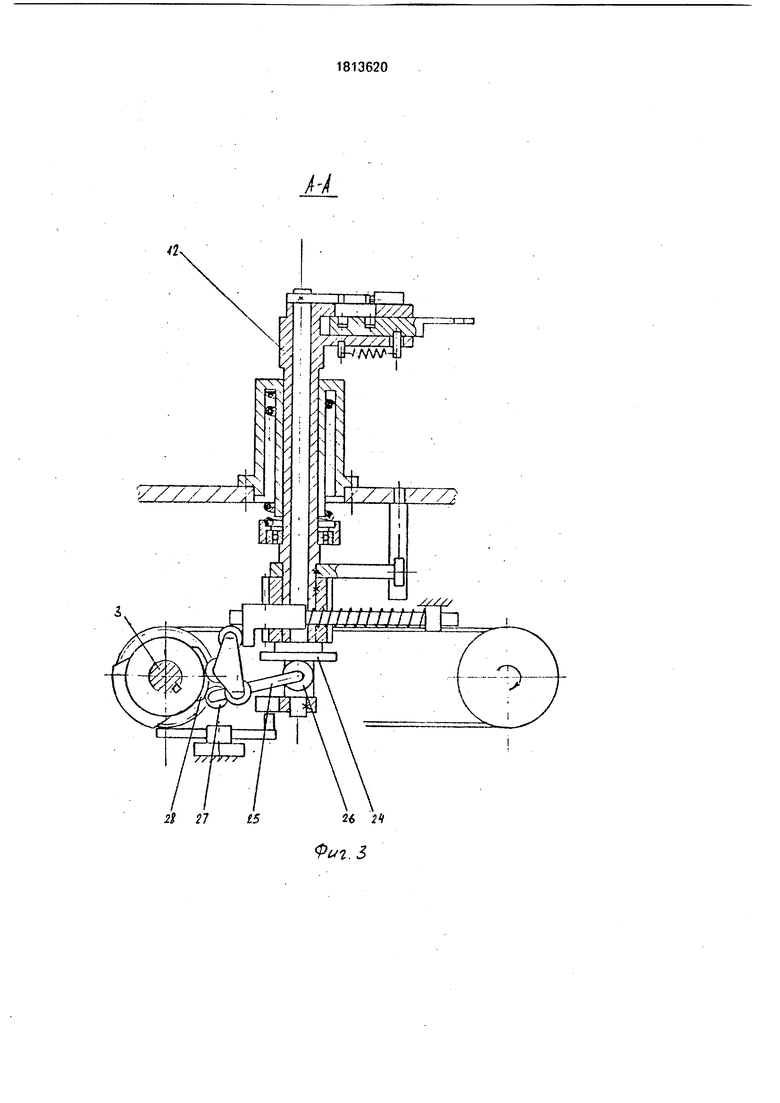
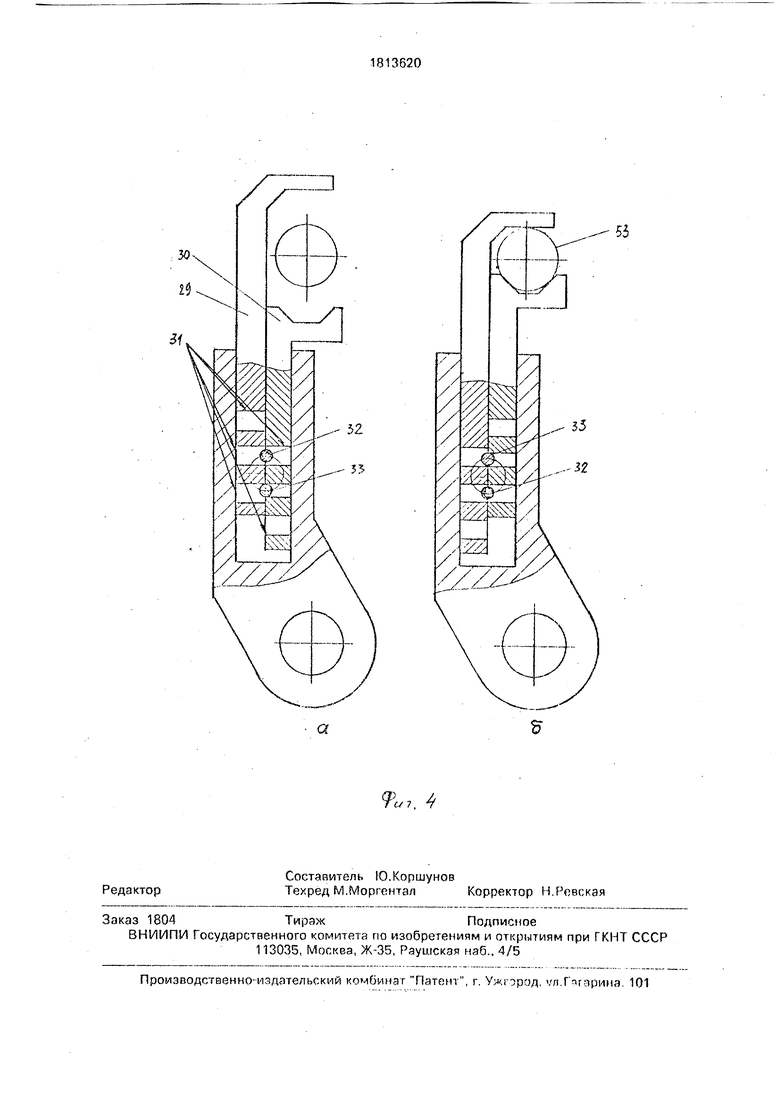
На фиг. 1 представлена конструктивная схема манипулятора: на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - то же, рука поднята; на фиг. 4 - захват в разжатом (а) и зажатом (б) положении губок.
Манипулятор (фиг. 1) содержит основание 1. привод 2, кинематически связанный с распределительным кулачковым валом 3, две механические руки 4 и 5 с захватами 6 и 7, снабженные механизмами подъема 8, поворота 9 и зажима-разжима 10. Каждая рука 4 или 5 (фиг. 2) имеет корпус 11. внутри которого расположена подпружиненная втулка 12, установленная с возможностью осевого перемещения и поворота относительно корпуса 11. На верхнем конце втулки 12 закреплен захват 6 или 7, а на нижнем - шестерня 13 механизма поворота. Каждый механизм поворота помимо шестерни 13 включает подпружиненную подвижную рейку 14, установленную на направляющей 15 с возможностью взаимодействия посредством рычага 16 с роликами 17 и 18 с кулачком 19 распределительного вала 3. На втулке 12 закреплено коромысло 20 с роликом 21 для взаимодействия с жесткими упорами 22 и 23.
Каждый из механизмов 8 подъема включает фланец 24, установленный на втулке 12, рычаг 25 с роликами 26 и 27 и кулачок 28, закрепленный на распределительном вале 3.
Механизм 10 зажима-разжима руки 5 включает две подвижные губки 29 и 30 (фиг. 4) с пазами 31, в которые входят два штифта 32 и 33, закрепленные в шестерне 34, установленной с возможностью взаимодействия с подпружиненным фиксатором 35 и с зубчатым сектором 36, жестко закрепленным на одном конце поворотного вала 37, размещенного внутри втулки 12. На нижнем конце вала 37 жестко закреплена поворотная вилка 38, в один из пазов 39 или 40 которой входит палец 41 рычага 42, установленного с возможностью взаимодействия с пазовым кулачком 43 распределительного вала 3. Механизм зажима-разжима руки 4 отличается от описанного зеркальным расположением подвижных губок 45 и 46 и поворотной вилки 47 с пазами 48 и 49.
Манипулятор имеет позицию 50 приема заготовки, позиции загрузки 51, выгрузки 52 и выдачи 53 готовой детали.
Манипулятор работает следующим образом. г
Привод 2 сообщает равномерное вращение распределительному валу 3, который управляет всеми механизмами манипулятора.
0 в исходном положении механические руки 4 и 5 разведены, их захваты 6 и 7 соответственно находятся в позициях приема 50 заготовки и выдачи 53 готовой детали в нижнем положении, захват 6 разжат, а
5 захват 7 сжат.
При вращении распределительного кулачкового вала 3 с помощью механизмов 10 зажима-разжима захват 6 зажимает заготовку, находящуюся в позиции 50 приема, а
0 захват 7 разжимается и выдает готовую деталь в позиции 53. Затем срабатывают механизмы подъема 8, механические руки 4 и 5 поднимаются, при этом захват 6 вынимают заготовку из гнезда на позиции 50 при5 ема.
С помощью механизмов 9 поворота механические руки 4 и 5 поворачиваются, при этом захваты 6 и 7 оказываются соответственно в позициях загрузки 51 и выгрузки 52
0 обслуживаемого станка, опускаются, затем захват 6 разжимается, устанавливая заготовку в зажимное приспособление станка (на фигурах не показано), а захват 7 зажимает готовую деталь. После этого руки 4 и 5
5 вновь поднимаются, разводятся и опускаются. В это время происходит поворот стола обслуживаемого станка, а затем цикл загрузки-выгрузки повторяется.
Механизм 8 подъема работает следую0 щим образом. При вращении кулачкового распределительного вала 3 в соответствии с циклограммой кулачок 28 взаимодействует с рычагом 25, который поворачивается против часовой стрелки, своим роликом 26 воз5 действует на фланец 24 и поднимает подпружиненную втулку 12, т. е. всю механическую руку 4. Когда ролик 27, обкатываясь по профилю, попадает в спад кулачка 28, рычаг 25 поворачивается по часовой стрелке
0 и втулка 12 под действием своей пружины занимает нижнее положение, механическая рука 4 опускается.
Механизм 9 поворота работает следующим образом. Кулачок 19 воздействует че5 рез рычаг 16 на подпружиненную подвижную рейку 14, которая, перемещаясь вправо или влево (фиг. 2), поворачивает шестерню 13 и, следовательно, механическую руку 4 по или против часовой стрелки. Для првышения точности фиксации в конечных
положениях руки установлены регулируемые жесткие упоры 22 и 23, с которыми взаимодействует коромысло 20 с роликами 21, жестко закрепленное на втулке 12.
Механизм 10 зажима-разжима работает следующим образом. При вращении распределительного кулачкового вала 3 (фиг. 1) пазовый кулачок 43 воздействует на рычаг 42, который своим пальцем 41, взаимрдейг ствуя с пазом 40, поворачивает вилку 38 и, следовательно, жестко связанный с ней зубчатый сектор 36, а он в свою дчередь шестерню 34. Кинематическая цепь от кулачка 43 до шестерни 34 рассчитана так, чтобы при повороте рычага 42 из одного положе ния в другое шестерня 34 делала полоборота. При этом положение штифтов 32 и 33 меняется на противоположное (фиг. 4). При повороте шестерни 34 штифты 32 и 33, пе- рёмещаясь в пазах 31, сдвигают или раздвигают подвижные губки 29 и 30, сжимая или разжимая заготовку. Крайние положения шестерни 34 фиксируются с помощью гюд- пружиненйргЬ фиксатора 35, а для надёжного удержания заготовки в захвате 7 и выборки люфта между штифтами 32 и 33 и краями пазов 31 губка 29 поджата к KOpriycy захвата пружиной 54.
Для зажима детали .на позиции 52 выгрузки захватом 7 (фиг. 1) торцовые кулачйк 43 поворачивает рычаг 42 против часовой стрелки, который своим пальцем 41, входящим в паз 40 вилки 38; поворачивает эту вилку по часовой стрелке. При этом поворачиваются зубчатый сектор 36 и связанная ч: ним шестерня 34, которая своими штифта ми 32 и 33 сводит губки 29 и 30 и зажимает обработанную деталь в позиции 52 выгрузки. После этого происходит подъем и пбво- рот руки 5, при котором обработанная деталь транспортируется из позиции 52 в позицию 53 выдачи готовых изделий;
В процессе подъема и поворота руки 5 вилка 38 выходит из контакта своим пазом
40 с пальцем 41, рычаг 42 остается в прежнем положении, а вилка 38 поворачивается вместе с рукой 5. При опускании руки 5 вилка 38 вновь входит в контакт с пальцем
41 рычага 42, но контактирует теперь уже пазом 39..
При очередном повороте рычага 42 по часовой стрелке от кулачка 43 вилка 38 поворачивается против часовой стрелки, вращает зубчатый сектор 36, шестерню 3.4 со штифтами 32 и 33, которые разводят губки 29 и 30, разжимая захват 7. При очередном подъеме и повороте руки 5 в позицию 52 вилка 38 сначала выходит из контакта своим пазом 39 с пальцем 41 рычага 42, а при опускании входит в контакт с пальцем 41
рычага 42 пазом 40. Работа захвата 6 происходит аналогично с учетом зеркального расположения его относительно захвата 7 и несколько иной последовательности движений: зажим захвата б осуществляется в позиции 50, а разжим - в позиции 51..
Периодическое размыкание кинематической цепи управления зажимом-разжи- моМ захватов 6 иi-7позволяет обеспечить все
движения манипулятора от одного кулачкового распределйтёльнЬгр вала 3, что повышает надежность работы и не требует использования Дополнительных приводов зажимных механизмов, например пневматических, элёктройагнэтных и т. п., и упро-
щает конструкцию манипулятора в целом.
: ; Применение предложенного технйческого решения расширить технодо ;йч скйе возможности Манипулятора за
счет обеспеченияг независимого движения
Механическйх рук в соответствии р требуе- мой циклогр1$ммой; Л Г ;1 ;; : ;;., ;:; :%--; :: -.у ф 6 р Мул si И - з о- б р е т ей и я v; .
иJ: Манипудйтор, содержащий основ|Ние, установленные На нем привод, Две механическиё руки с захватами, 1и е1бщйми
поДййжныё:губки, распределительный вал с
профильными кулачками, )ани1змы подьема и г1озЬрота рук, а такж0 зажйма-разжи- Ма захватор и механизм управлений
захватами, связанныеi с прив6дом,;о т л и ч
ающий с я тем, что с целью упрощения
конструкций путём умён | ц1ениякинёмат
ческих цепей при обеспечении функцио:нальных ч;/перемещений звеньев манипулятора от Ьднргй привода, он снабжен устройством размыкания кинематиче- коД цепи механизма управления
захватами, выполненным в виде двуплечегр рычага с пальцем и прворбтной вилки с двумя пазаш, при этом механизм зажима-разжима каждого захвата выполнен в виде вала, размещенного внутри руки, зубчатого сектора, жестко закрепленного На одном i
конце этого вала, шестерни с штифтами, находящейся в зацеплений с зубчатым сектором, и подпружиненного фиксатора установленного на руке с возможностью взаимодействия с шестерней, а в губках захвата выполнены параллельные пазы, причем двуплечий рычаг указанного устройства установлен с возможностью взаимодействия с соответствующим профильным кулачком распределительного вала и
посредством пальца - с пазами дополнительно введенной поворотной вилки, за-, крепленной на втором конце вала, при этом штифты шестерни размещены в параллель- ных пазах губок захвата.
2. Манипулятор по п. 1, о т л и ч а ю щ и- и с я тем, что механизм поворота руки выполнен в виде закрепленкых на основании упоров, подпружиненной зубчатой рейки и рычага с двумя роликами, имеющими возможность взаимодействия одним роликом с соответствующим профильным кулачком распределительного вала, а другим-с подпружиненной зубчатой рейкой, находящейся в зацеплении с второй дополнительно
введенной шестерней, закрепленной на руке, а также в виде коромысла, предназначенного для взаимодействия с упорами, а механизм подъема руки выполнен в виде второго двуплечего рычага, установленного на основании между поворотной вилкой и зубчатой рейкой с возможностью взаимодействия с соответствующим профильным кулачком распределительного вала и с торцом руки. ;;.-. . : .;. ; ч ;;. . ;,. ,).

| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный станок | 1987 |
|
SU1454652A1 |
| Автомат для изготовления двухветвевых пружин с отогнутыми концами | 1982 |
|
SU1052304A1 |
| Манипулятор | 1982 |
|
SU1138221A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| Устройство для цоколевания коммутаторных ламп | 1977 |
|
SU736217A1 |
| Ротационно-обжимное устройство | 1977 |
|
SU742024A1 |
| Устройство для намотки ленты в рулон | 1987 |
|
SU1440831A1 |
| Устройство для намотки ленты в рулон | 1989 |
|
SU1654204A2 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Устройство для групповой сборки и пайки монолитных керамических конденсаторов | 1988 |
|
SU1599912A1 |
Использование: в машиностроении для автоматической загрузки и выгрузки деталей, например, в агрегатных станках. Сущность изобретения: в механизме зажима захватов 6 и 7 имеются поворотная вилка 38 с пазами 39 и 40, в которые входит палец 41 двуплечего рычага 42, взаимодействующего с пазовым кулачком 43 распределительного кулачкового вала 3, и зубчатый сектор 36, зацепляющийся с шестерней 34, имеющей штифты, входящие в пазы губок. Поворотная вилка поочередно взаимодействует своими пазами 39 и 40 с пальцем 41, зажимая и разжимая деталь в соответствующих позициях 50 и 51 приема заготовки и выдачи готовой детали. .1 з. п, ф-лы, 4 ил.
иг.2.
| Авторское свидетельство СССР N21331638, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
