Изобретение относится к машиностроению и может быть использовано в промышленных роботах и манипуляторах.
Цель изобретения - повышение надежности работы захватного устройства.
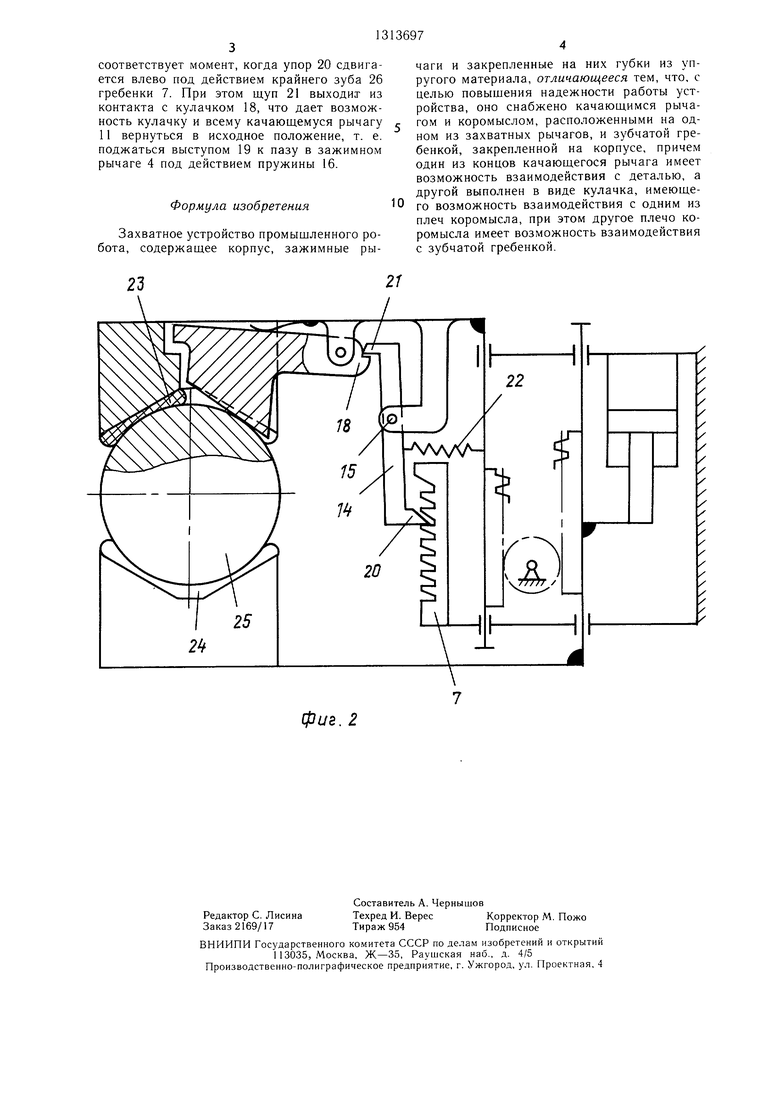
На фиг. 1 схематически изображено захватное устройство без объекта манипулирования, обш,ий вид; на фиг. 2 - то же, с зажатым объектом.
Захватное устройство состоит из корпуса
Таким образом зажимные рычаги 4 и 5 начинают перемещаться навстречу один другому. При этом упор 20 выходит из контакта с крайним зубом 26 гребенки 7 и с принимает положение, изображенное на фиг. 1. В этом положении ш,уп 21 поджат к кулачку 18, а упор 20 перемеш,ается над зубьями гребенки 7, не входя с ними в зацепление. По мере сближения зажимных рычагов 4 и 5 губки 23 и 24 вступают в
1, в котором установлены с возможностью Ю контакт с объемом 25 манипулирования перемеш.ения направляюш,ие 2 и 3 с закреп- и начинают деформироваться, создавая усилие зажатия объекта 25. При этом площадь контакта губок и объекта увеличивается, что снижа ет давление на единицу
находится в зацеплении с зубчатыми рейками 9 и 10, выполненными соответственно на направляющих 2 и 3. На зажимном рычаге 4 установлены качающийся рычаг 1
ленными на них зажимными рычагами 4 и 5. В корпусе закреплены поступательный двигатель 6, шток которого соединен с направляющей 3, гребенка 7 и зубчатое . площади объекта и позволяет захватывать колесо 8. При этом зубчатое колесо 8 хрупкие объекты. В результате дальнейшего
перемещения губок 23 и 24 объект 25 касается контактной поверхности 17 качающегося рычага 11 и начинает поворачивать качающийся рычаг 11 вокруг оси 12, прес возможностью качания вокруг оси 12 20 одолевая усилие пружины 16. Одновременно и кронштейн 13 с коромыслом 14, уста- происходит поворот кулачка 18, что приводит новленным на оси 15 с возможностью ка- к резкому перемещению щупа 21 влево и чания вокруг нее. Качающийся рычаг 11 под- повороту коромысла 14 вокруг оси 15 под пружинен пружиной 16, закрепленной на за- действием пружины 22 (фиг. 2). В резуль- жимпом рычаге 4, и содержит контактную тате поворота коромысла 14 упор 20 входит поверхность 17, кулачок 18 и выступ 19, в зацепление с зубьями гребенки 7, что
делает невозможным дальнейшее перемещение зажимных рычагов навстречу один другому. В результате объект 25 оказывается зажат усилием, распределенным по значительной площади объекта 25 и обусловленным упругостью губок. Одновременно с этим обеспечивается надежное фиксирование зажимных рычагов 4 и 5 в занятом
которым качающийся рычаг упирается в паз, выполненный в зажимном рычаге 4. На одном плече коромысла 14 выполнен упор 20, а на другом - щуп 21, упирающийся в кулачок 18 под действием пружины 22, один конец которой закреплен на коро.мыс- ле, а другой - на направляющей 2. На зажимных рычагах 4 и 5 закреплены губки 23 и 24 из упругого материала, служащие для зажатия объекта 25 (фиг. 2). Крайний зуб 26 гребенки 7 выполнен несколько большим по высоте, чем остальные зубья, а шаг S (фиг. 1) между зубьями гребенки 7 меньше величины максимальной деформации h губок.
Захватное устройство работает следующим образом.
Манипулятор подводит захватное устройство к объекту манипулирования таким образом, что объект манипулирования оказывается расположен между губками 23 и 24. В это время зажимные рычаги 4 и 5 находятся в максимально раскрытом положении, которое характеризуется тем, что качающийся рычаг 11 своим выступом 19 поджат пружиной 16 к пазу зажимного рычага 4 (фиг. 1), а упор 20 коромысла 14 упирается под действием пружины 22 в крайний зуб 26 гребенки 7, в результате чего щуп 21 оказывается несколько отодвинут от кулачка 18. Затем в поступательный двигатель 6 подается давление, что приводит к перемещению вверх штока двигателя и направ30
35
ими положении из-за невозможности их дальнейшего сближения вследствие зацепления упора 20 с одним из зубьев гребенки 7 и невозможности раскрытия зажимных рычагов 4 и 5 при действии на них в процессе манипулирования сил инерции вследствие усилия, развиваемого достаточно мощным поступательным двигателем 6.
40
Освобождение объекта 25 манипулирования осуществляется следующим образом. Манипулятор выводит захватное устройство с объектом манипулирования на заданную позицию. После этого подается давление в другую полость двигателя и его шток начинает перемещаться вниз. Это приводит в движение зубчатую рейку 10, зубчатое колесо 8 и зубчатую рейку 9. Вместе с зубчатыми рейками 9 и 10 перемещаются в противоположных направлениях направляю щие 2 и 3 и зажимные рычаги 4 и 5, причем зажимной рычаг 4 двигается вверх, а зажимной рычаг 5 - вниз. В результате объект 25 оказывается разжатым и губки 23 и 24 принимают первоначальную
45
ляющей 3. Последняя, двигаясь вместе с зуб-55 ор 20 вследствие своего скоба печатой рейкой 10, приводит в движение зуб-ремещается вверх, вступая в контакт послечатое колесо 8 и через него зубчатуюдовательно со всеми зубьями гребенки. Зарейку 9, которая перемещается вниз вместежимные рычаги 4 и 5 перемещаются до свос направляющей 2 и зажимным рычагом 4.его крайнего положения. Этому положению
Таким образом зажимные рычаги 4 и 5 начинают перемещаться навстречу один другому. При этом упор 20 выходит из контакта с крайним зубом 26 гребенки 7 и принимает положение, изображенное на фиг. 1. В этом положении ш,уп 21 поджат к кулачку 18, а упор 20 перемеш,ается над зубьями гребенки 7, не входя с ними в зацепление. По мере сближения зажимных рычагов 4 и 5 губки 23 и 24 вступают в
контакт с объемом 25 манипулирования и начинают деформироваться, создавая усилие зажатия объекта 25. При этом площадь контакта губок и объекта увеличивается, что снижа ет давление на единицу
площади объекта и позволяет захватывать хрупкие объекты. В результате дальнейшего
ими положении из-за невозможности их дальнейшего сближения вследствие зацепления упора 20 с одним из зубьев гребенки 7 и невозможности раскрытия зажимных рычагов 4 и 5 при действии на них в процессе манипулирования сил инерции вследствие усилия, развиваемого достаточно мощным поступательным двигателем 6.
Освобождение объекта 25 манипулирования осуществляется следующим образом. Манипулятор выводит захватное устройство с объектом манипулирования на заданную позицию. После этого подается давление в другую полость двигателя и его шток начинает перемещаться вниз. Это приводит в движение зубчатую рейку 10, зубчатое коесо 8 и зубчатую рейку 9. Вместе с зубчатыми рейками 9 и 10 перемещаются в противоположных направлениях направляющие 2 и 3 и зажимные рычаги 4 и 5, причем зажимной рычаг 4 двигается вверх, а зажимной рычаг 5 - вниз. В резульате объект 25 оказывается разжатым и губки 23 и 24 принимают первоначальную
ор 20 вследствие своего скоба песоответствует момент, когда упор 20 сдвигается влево под действием крайнего зуба 26 гребенки 7. При этом щуп 21 выходит из контакта с кулачком 18, что дает возможность кулачку и всему качающемуся рычагу 11 вернуться в исходное положение, т. е. поджаться выступом 19 к пазу в зажимном рычаге 4 под действием пружины 16.
Формула изобретения 0
Захватное устройство промышленного робота, содержащее корпус, зажимные рычаги и закрепленные на них губки из упругого материала, отличающееся тем, что, с целью повышения надежности работы устройства, оно снабжено качающимся рычагом и коромыслом, расположенными на одном из захватных рычагов, и зубчатой гребенкой, закрепленной на корпусе, причем один из концов качающегося рычага имеет возможность взаимодействия с деталью, а другой выполнен в виде кулачка, имеющего возможность взаимодействия с одним из плеч коромысла, при этом другое плечо коромысла имеет возможность взаимодействия с зубчатой гребенкой.
фиг. 2
Редактор С. Лисина Заказ 2169/17
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Составитель А. Чериышов
Техред И. ВересКорректор М. Пожо
Тираж 954Подписное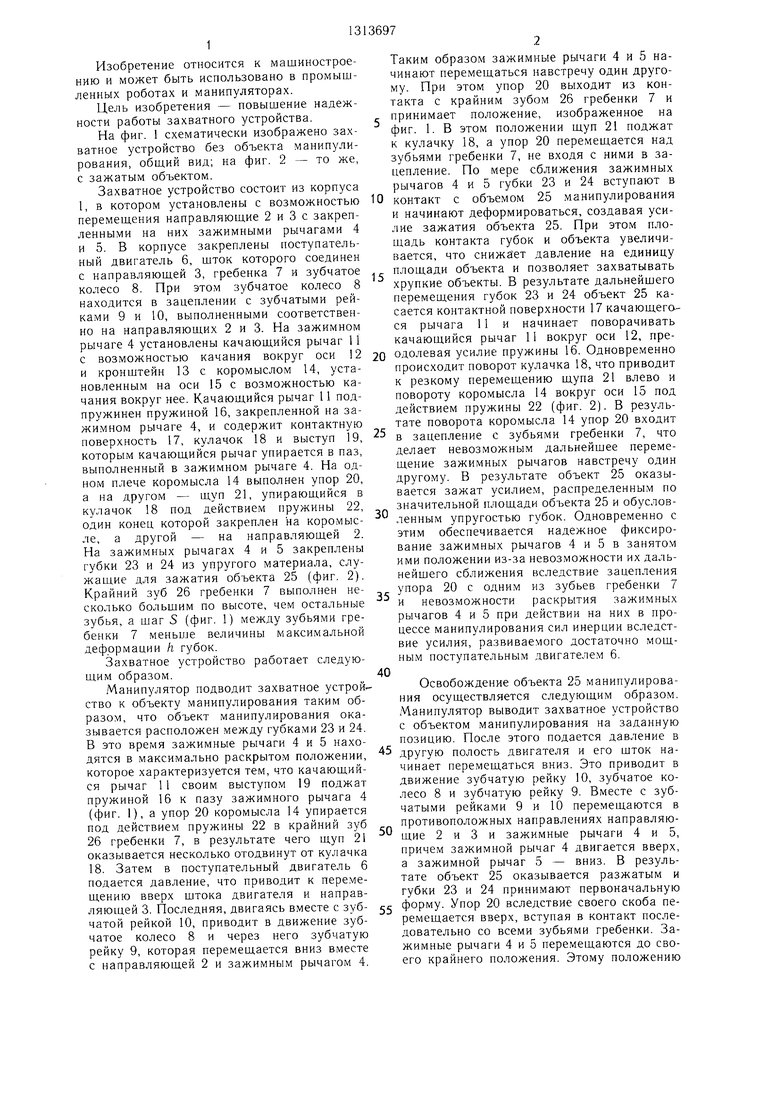
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захватное устройство для прижима балок | 1971 |
|
SU449869A1 |
| Правильно-растяжная машина | 1975 |
|
SU566657A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Электромонтажные клещи | 1985 |
|
SU1501203A1 |
| УСТРОЙСТВО для ПОДАЧИ ШТУЧНЫХ ЗАГОТОВ( в ЗОНУ ОБРАБОТКИ | 1972 |
|
SU327958A1 |
| Устройство для подачи патронов | 1984 |
|
SU1440834A1 |
| Устройство для правки горячего проката растяжением | 1975 |
|
SU570428A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
Изобретение относится к области машиностроения и может быть использовано в промышленных роботах и манипуляторах. Целью изобретения является повышение надежности работы захватного устройства, которое имеет корпус 1 с установленными в нем с возможностью перемеш.ения зажимными рычагами 4 и 5. На зажимном рычаге 4 установлены качающийся вокруг оси 12 рычаг 11 и кронштейн 13, на оси 15 которого расположено коромысло 14. На рычаге II выполнен кулачок 18, взаимодействующий с одним из концов коромысла 14, а другой его конец взаимодействует с зубчатой гребенкой 7, установленной в корпусе захвата. Во время захвата детали происходит деформация упругих губок и поворот рычага 11 вокруг оси 12, что вызывает поворот коромысла 14, который своим концом взаимодействует с зубчатой гребенкой 7, обеспечивая стопорение зажимных рычагов 4 и 5. 2 ил. I (Л 19 11 1Б 12 S 21 J3 СО 00 05 СО W ;
| Очувствленный захват манипулятора | 1980 |
|
SU933452A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
