В предлагаемом устройстве для уменьшения качки судов применен стабилизирующий руль, гаерЬ которого разделено на две, самостоятельные поворотные половины, могущие совершать как совместное движение при обычном управлении судном/та к и независ 1чое дрУг -от друга движение 6 разные стороны при волнений для создания момента, противоположного MOfteHTy, вызывае,мому волной.
Для сообщен1 й половинам руля движения в разные сторо1да между пере дачей от приводного механизма и вали-ком одной из половин руля помещена или паразитная шестерня, или перекрестный ремень.-, ,
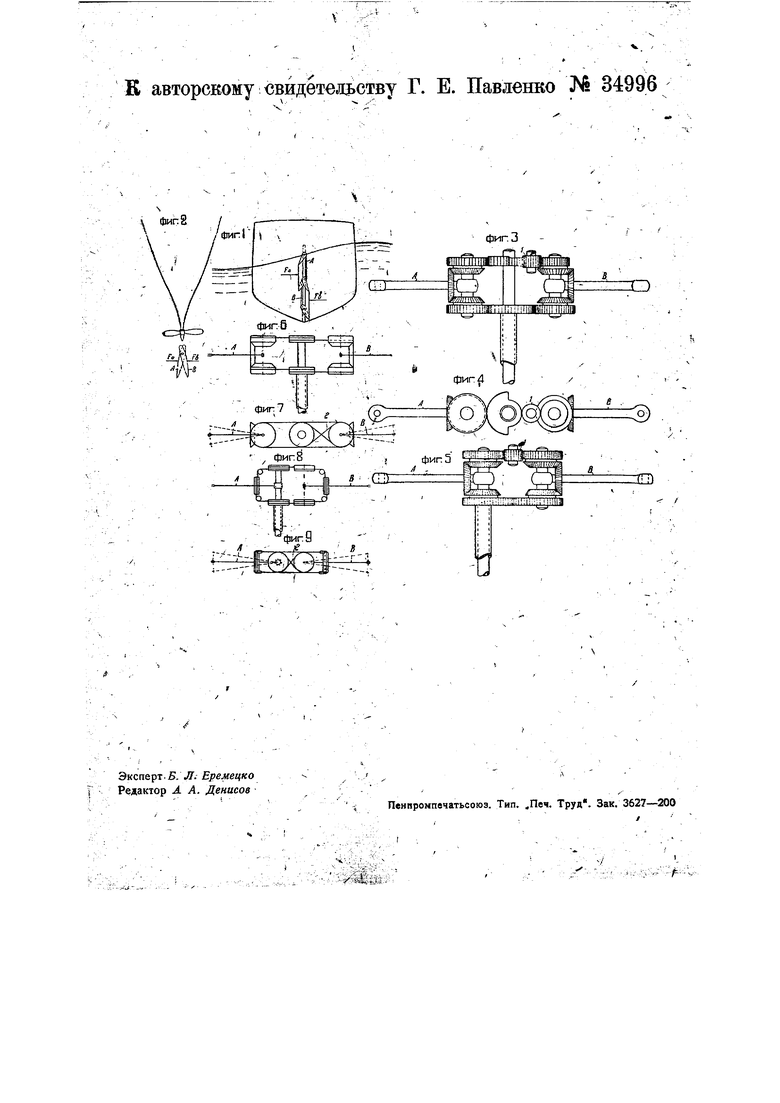
.На- схематическом /чертеже фиг. Л изображает вид сзади устройства для качки судов; фиг. 2 - вид сверху его; фиг. сбоку мех9низм|1 для приведения в движение руля i oсредством зубчаток передачи; фиг. 4 вид сверху его; фиг. 5 - вид сбоку, в другой форме выполнения; фиг. ,6- то же, с применением перекрестного ремня; фиг. 7-вид сверху его; фиг. 8- вид сбоку 1чеханизма для приведения в движение руля посредством гибких тяг; фиг. 9-,вид сверху его.
Стабилизирующий.руль в предлагаемом устройстве д(1Я уменьшения качки судов относится к числу активных спо(241),,.;,.собов успокоения качки и представляет собой руль одной из существук)щих форм, но перо его по вертикали разделено на две самостоятельные половины А и В (фиг. 1 и 2), поворотные как совместно, так и независимо одна от другой. Обе половины А и В руля установлены таким образом, что возникающие на них силы реакции воды fa и Fb при движении усиленные действием винта (при нечетном числе винтов), роздают момент, противодействукэщий кренящему моменту от действия волны.
При отсутствии волнения обе половины пера руля устанавливаются неподвижно относительно друг друга и работают, как обычный руль. При работе же стабилизирующего руля во время качки относительное движение половин пера руля может быть сделано независимым от их совместного движения, что осуществимо с помощью механизмов, изображенных на фиг 3-9.
Механизм служит для выполнения двух перемещений стабилизирующего руля, а именно-поворота руля в целом, как обычного руля, и изменйия угла растворения между двумя половинами руля. Оба движения должны б)ыть независимыми, т. е. мёхаиизм должен допускать произвольные изменен1 я угла общего поворота руля при всяком угле растворения между половицами, не-меняя jilU 4V :-,фиг.8 .- , фмп5