Устройство от«осится к системам автомати481ского регулирования « у1П равлення.
Известны задающие устройства перемещений рабочего ,на роторного экокаватора, содержащие сельсин-датчик, дифференциальный сельси«-.ир«е;м«И1К, вьшрялштель и логический элемент, соединенный через усилитель с исполнительным реле.
Описьввае.мое устройство отличается тем, что в «ем допо.шчительно установлен повышающий трансформатор, первичная обмотка «отарсто соединена с вывода-ми дву.х фаз обмотки ротора дифференциального сельси«а-1ириемника, а вторичная обмотка подключена ко входу щьшрЯМителя, вы.хэд которого через перемеиный резистор соединен со входом логического элемента.
Такое выполнение позволило повысить надежность работы задающего устройства.
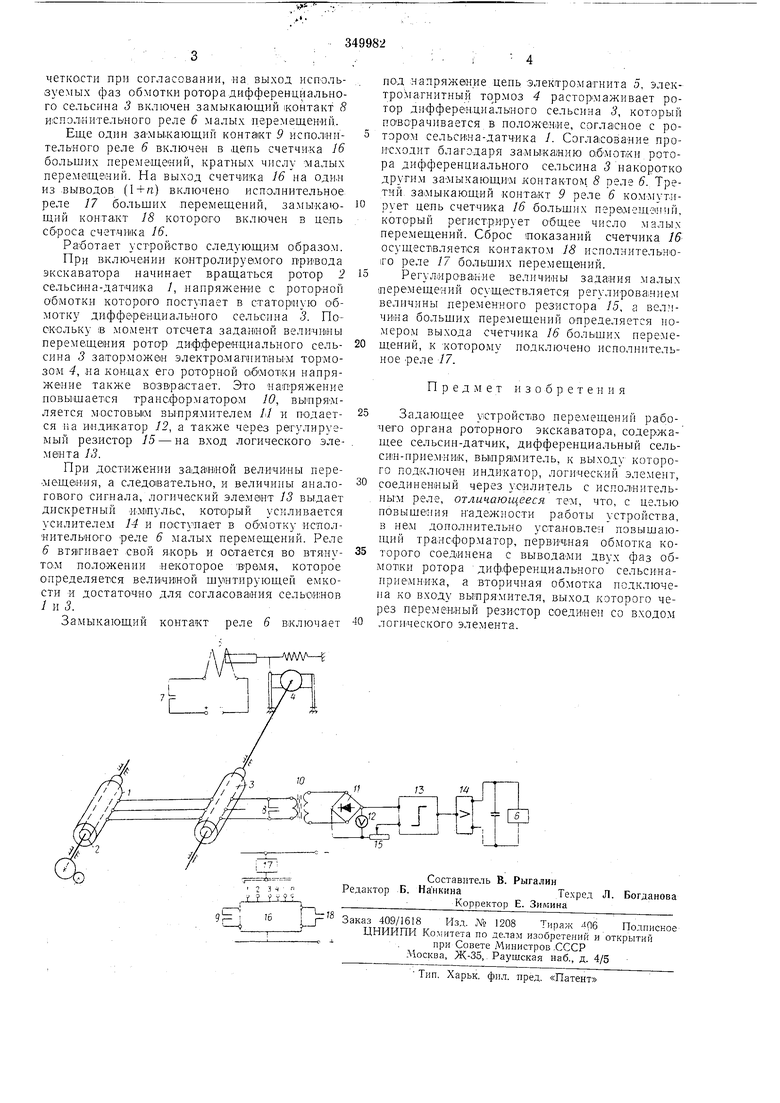
На чертеже привед&на блок-схема описываемое уст.ройства.
Она содер жит сельсин-датчик /, ротор 2 которого кинеМатически соединен со в.ходным валом; дифференциальный сельсин-приемник 3; электромагнитный то-рмоз 4; электромагнит 5; исполнительное реле 6 с контактами 7, 8, 9, .повышающий трансформатор 10; выпрямитель //; индикатор 12; логичесгкий элемент 13; усилитель 14; переменный резистор 15; счетчик 16 больщИХ перемещений; реле 17
больщих перемещений с контактом 18.
Ротор 2 сельсина-датчика / с полтощью кинематической цепочки соединен с конкретным приводом экскаватора, например с приводом хода, с приводом подъема роторной стрелы. Передаточное число кинематической цепо1чки выбрано таким, чтобы за величину одного малого перемещения ротора 2 сельсина-датчика / поворачивался на угол не более
60-70° вал двигателя соответствующего привода. За величину -малого перемещения приняты параметры стружки, отрабатываемой роторныМ колесом, т. е. ее толщина и высота. Сельсин-датчик / вы1по.тнен на базе бесконтактного сельсин-датчика типа БД-501А. Роторные выводы сельсин-датчика соединены со статорной обмоткой дифференциального сельсина 3. Дифференциальный сельсин выполняет функции вращающегося трансформатора, ротор .которого во время отсчета заторможен электромагнитным тормозом 4, а в момент согласования растормаживается благодаря воздействию электромагнита 5, цепь питания которо:го ком-мутируется контактом 7 иополнительного реле 6 малых перемещений.
Для получения выдержки времени при согласовании дифференциального сельсина 3 параллельно облютке реле 6 включен коеден
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1967 |
|
SU190458A1 |
| Сельсинно-следящая система регулятора пространственного положения ножей летучих ножниц | 1971 |
|
SU441118A1 |
| ИНДУКЦИОННЫЙ СУММАТОР | 1968 |
|
SU209066A1 |
| РОТАЦИОННЫЙ ВИСКОЗИМЕТР | 1972 |
|
SU343199A1 |
| Преобразователь угла поворота вала в напряжение | 1983 |
|
SU1124360A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU998234A1 |
| ПАТЕИТЙО-ТЕХННЧССНДЙБИБЛИОТЕКАА. И. Ангели | 1972 |
|
SU337659A1 |
| Устройство для управления электромагнитным приводом рулевой машины судна | 1978 |
|
SU983658A1 |
| гПЧП 'ЗпПП'^РТО?: vUiiA иПаНиГ lutji | 1973 |
|
SU393574A1 |
| УСТРОЙСТВО для НАЛЮТКИ КОНДЕНСАТОРОВ | 1971 |
|
SU295149A1 |
