ПРИБОР ДЛЯ УМЕНЬШЕНИЯ ВЛИЯНИЯ ОКЕАНСКИХ ВОЛН НА СЕЙСМИЧЕСКУЮ ЗАПИСЬ ДНА ОКЕАНА
Изобретение относится к записи сейсмических колебаний, в частности к записи сейсмических колебаний дна океана.
Такого рода запись .полностью зависит от преобладающих условий на море. Так, например, когда запись п,роводится лри большом волнении, движение волн накладывается на запись, в результате чего затрудняется расшифровка записи.
Цель изобретения - повышение точности изме рений.
Это достигается тем, что прибор содержит устройство, устанавливаемое на .плавучей платформе, предназначенное для посылки сигнала к дну океана, устройство для приема сигнала, отраженного от дна океана, устройство для преобразования информации, полученной от передачи и .приема сигнала, в запись морского дна, акселерометр, воспринимающий смещение судна под действием волны, устройство для двойного интегрирования выходного сигнала акселерометра и устройство, реагирующее на выходной сигнал устройства интегрирования и изменяю щее посылки сигнала к дну океана, благодаря чему компенсируется смещение, вызванное волной.
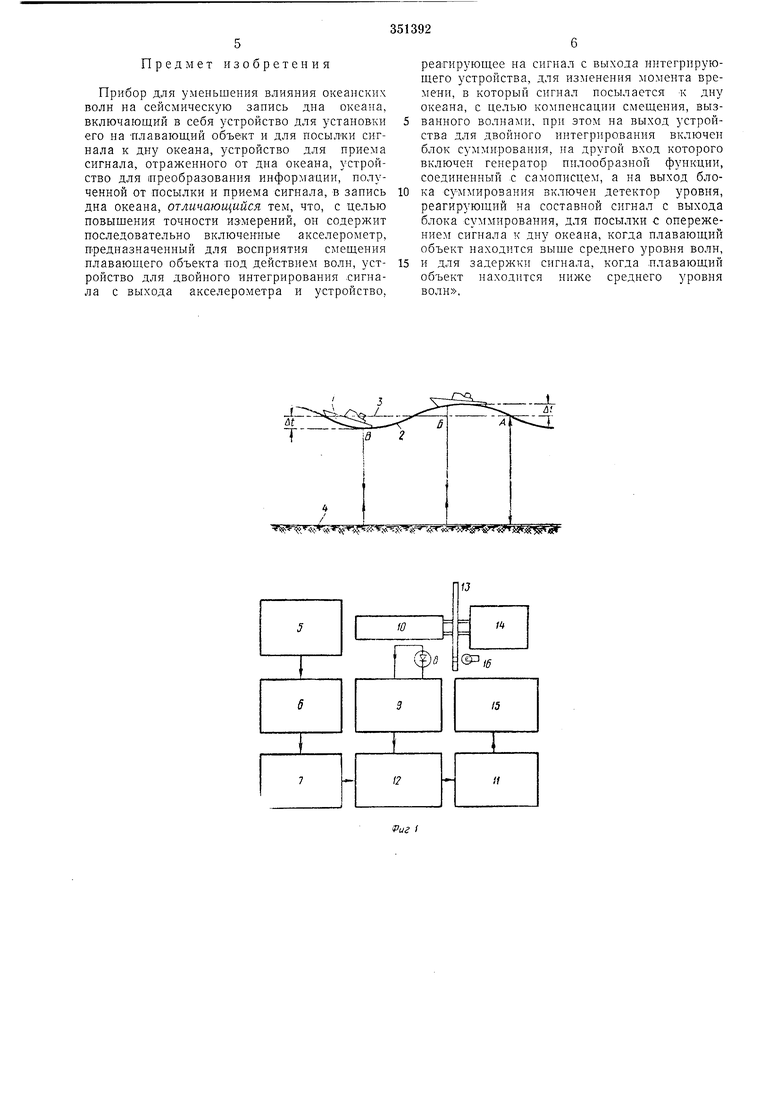
функции, на который подается напряжение через определенные интервалы с самописца, устройство суммирования выходного сигнала с генератора пилообразной функции с выходным сигналом интеграторов и детектор уровня, реагирующий на составной сигнал с выхода суммирующего устройства и обеспечивающий опережение сигнала, посылаемого к дну океана, когда судно находится выще среднего уровня волны, и задержку сигнала, когда судно находится ниже среднего уровня волн. На фиг. 1 показана блок-схема предлагаемого устройства и иллюстрируется принцип его работы; на фиг. 2 и 3 - формы сигналов
в различных частях с.чемы.
Судно 1, имеющее на борту прибор для сейсмической записи, движется по высоким волнам 2 со средним уровнем 3. Для упрощения описания морское дно 4 принято абсолютно горизонтальным.
Когда судно находится в положении А, т. е. на среднем уровне волны, к дну океана посылается импульс в момент времени Го. Этот импульс отражается от дна океана и поступает на сейсмический прибор, установленный на судне. Примем, что время прохождения импульса от судна к дну океана составляет / сек, таким образом, полное время прохождения импульса при пахождении судна в положении Л равно 2t. Импульс возвращается на судно в момент (Го+ 2/) при условии, что расстояние между судном и дном океана за это время изменяется несущественно. В положении Б судно находится на гребне волны. Положим, что время прохождения имлульса от положения Б до дна океана составляет . Полное время прохождения имнульса из положения Б (равно, таким образом, (2t + 2M.
В положении В судно находится во впадине волны. Примем, что время прохождения импульса из положения В к морскому дну составляет t-Д, а .полное время прохождения импульса из положения В, таким образом, (2/-2ДО.
Отсюда следует, что когда нет компенсации увеличения или уменьщения времени прохождения импульса вследствие волнения, при1бавление или вычитание А/ отражается на записи, затрудняя ее расщифровку.
Проблема рещена опережением или задержкой имнульса в соответствии с мгновенным вертикальным положением судна относительно среднего уровня волн. Так, в положении Б импульс посылается в момент времени (Го-2Д/), т. е. с опережением на отрезок времени, соответствующий двойному расстоянию вверх от среднего уровня волн до судна. Это означает, что импульс возвращается назад на судно в момент времени (Го- -2Д/ + 2г + 2Д/), т. е. Го+2Л
В положении В импульс передается в момент времени (Го+2Д), иначе в этом положении импульс посылается с задержкой на отрезок времени, соответствующий двойному расстоянию вниз от среднего уровня волн до судна. Это означает, что в этом положении судна импульс возвращается на него в момент времени Го + 2А/Ч-2/-2Д, т. е. Го + 2
Па фиг. 1 показана блок-схема прибора.
На судне на карданном подвесе укреплен чувствительный акселерометр 5. Акселерометр измеряет вертикальное ускорение судна вследствие волнения. Выходной сигнал с акселерометра представляет собой напряжение, пропорциональное ускорению. Это напряжение подается на два интелратора б и 7 выходное напряжение которых пропорционально вертикальному смещению судна в волнах, так как двойной интеграл ускорения есть расстояние.
Измерительный прибор (не показан) используется для управления функцией интеграла и для этой цели откалиброван в футах относительно среднего вертикального положения судна.
Для периодической посылки импульса с фотодиода 8 на генератор 9 пилообразной функции использован стандартный блок самописца 10. При приеме этого импульса генератор 9 генерирует пилообразную функцию.
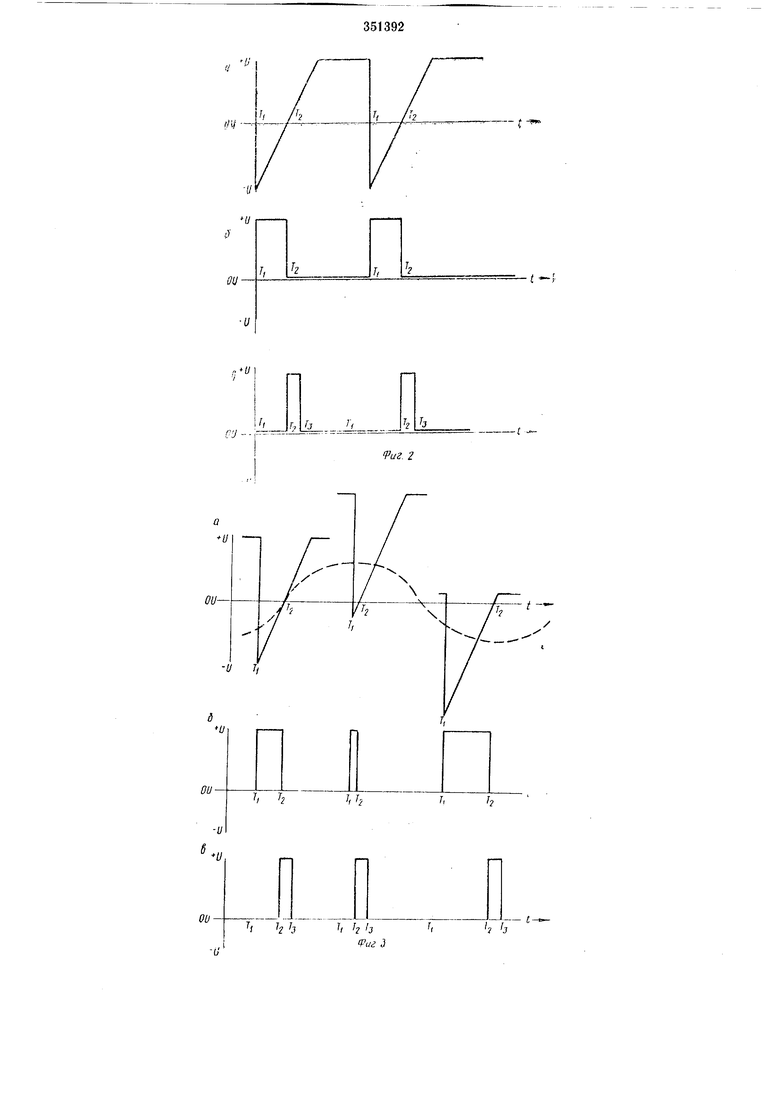
Детектор 11 уровня определяет среднее положение каждой пилообразной функции при отсутствии выходного сигнала на акселерометре 5 и генерирует последовательность импульсов, задержанную на несколько миллисекунд но отнощению к первоначальньгм импульсам с фотодиода 8, что ясно из диаграммы, изображенной на фиг. 2 (в случае, когда вертикальное положение судна не изменяется или когда двойной интеграл равен нулю).
Форма сигнала пилообразной функции, генерируемой генератором 9, показана на
фиг. 2, а. Переднее положение пилообразной функции расположено на О, в. Детектор уровня смещен таким образом, что он открывается в том случае, когда выходной сигнал на нем (в данном случае пилообразная функция) превыщает О, в. Другими словами, детектор уровня имеет такие пара-метры, что он открывается в момент Га и закрывается в момент Т. Форма сигнала на выходе детектора уровня показана на фиг. 2, б. Отрицательная часть
(в момент TZ сигнала на выходе детектора уровня используется затем для генерирования короткого импульса фиксированной длительности, как показано на фиг. 2, в. Когда судно находит на волну, на выходе
акселерометра появляется сигнал и, 1ка« показано на схеме, двойной интеграл этого сигнала складывается с пилообразной функцией при помощи суммирующего усилителя 12, после чего он подается на детектор уровня.
На фиг. 3, а показан составной сигнал функции двойного интеграла, а также пилообразная функция, причем функция двойного интеграла кгображена пунктирно; на фиг. 3, б- форма сигнала на выходе детектора уровня,
а на фиг. 3, б - форма окончательных сигналов, идущих на тр иггерный усилитель.
Из рассмотрения фиг. 3, б следует, что если среднее положение составного сигнала, изображенного на фиг. 3, а, выше О, в (т. е.
функция двойного интеграла положительна), то промежуток времени между Ti и Тг увеличивается.
Следовательно, при использовании схемы, изображенный на фиг. 1, вносится задержка
, которая изменяется с изменением вертикального положения судна таким образом, что когда судно находится на гребне волны, TI-Гг уменьшается, а если во впадине волны, TI-Га увеличивается. Другими словами,
действительный импульс, посылаемый к дну океана, опережает или задерживается.
Что касается интеграторов 6 -к 7, стандартная частотная характеристика интегратора на переменном токе расщирена, с тем чтобы обеспечить точное интегрирование на низких частотах. Это осуществляется путем включения параллельно интегрирующему ;конденсатору Г-образной схемы, предназначенной для заваливания приблизительно на той же частоте,
на которой обычно стабилизирующий резистор и конденсатор ограничивают левую часть частотной характеристики.
Блок-схема на фиг. 1 содержит также дисковый прерыватель 13, мотор 14, триггерный
Предмет изобретения
Прибор для уменьшения влияния океанских волн на сейсмическую запись дна океана, включающий в себя устройство для установки его на плавающий объект и для посылки сигнала к дну океана, устройство для приема сигнала, отраженного от дна океана, устройство для преобразования информации, иолученной от посылки и приема сигнала, в запись дна океана, отличающийся тем, что, с целью повыщения точности измерений, он содержит последовательно включенные акселерометр, П|редназначеииый для восприятия смещения плавающего объекта иод действием воли, устройство для двойиого интегрироваиия .сигнала с выхода акселерометра и устройство.
реагирующее на сигнал с выхода интегрирующего устройства, для изменения момента времени, в который сигиал посылается к диу океана, с целью компеисации смещения, вызванного волнами, при этом на выход устройства для двойиого интегрирования включен блок суммирования, на другой вход которого включен генератор пилообразной функции, соединенный с самописцем, а на выход блока суммирования включен детектор уровня, реагирующий на составной сигнал с выхода блока суммирования, для посылки с опережением сигнала к дну океана, когда плавающий объект находится выще среднего уровня волн,
и для задержки сигиала, когда плавающий объект находится ниже среднего уровня волн.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2004 |
|
RU2416810C2 |
| СЕЙСМИЧЕСКАЯ РАЗВЕДКА | 2003 |
|
RU2334999C2 |
| СЕЙСМИЧЕСКАЯ РАЗВЕДКА | 2006 |
|
RU2396578C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ УЗЛА ДО ПОВЕРХНОСТИ В СЕТИ АКУСТИЧЕСКИХ УЗЛОВ | 2012 |
|
RU2589368C2 |
| МНОГОЧАСТОТНЫЙ КОРРЕЛЯЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЙ | 2022 |
|
RU2795577C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2455664C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| Корреляционный способ измерения параметров тонкой структуры водной среды | 2022 |
|
RU2799974C1 |
. lfl Js iF « s - 5rV)
13
:
Ц -.
ffU
h //
t-y
- f
//
OU-
U 7,
