Изобретение относится к подъемникам для люлек, применяемых при производстве строительных работ.
Предлагаемый подъемник представляет собою обойму, к которой подвешивается люлька (платформа) и через которую пропущены оба конца подвесного каната, перекинутого через неподвижный блок. Обойма снабжена двумя парными зажимными кулаками у каждого конца подвесного каната и рукояткой с двумя криволинейными кулаками, один из которых укреплен на ней неподвижно. Качанием рукоятки производится защемление и перемещение того или другого конца подвесного каната, т.е. подъем или спуск люльки.
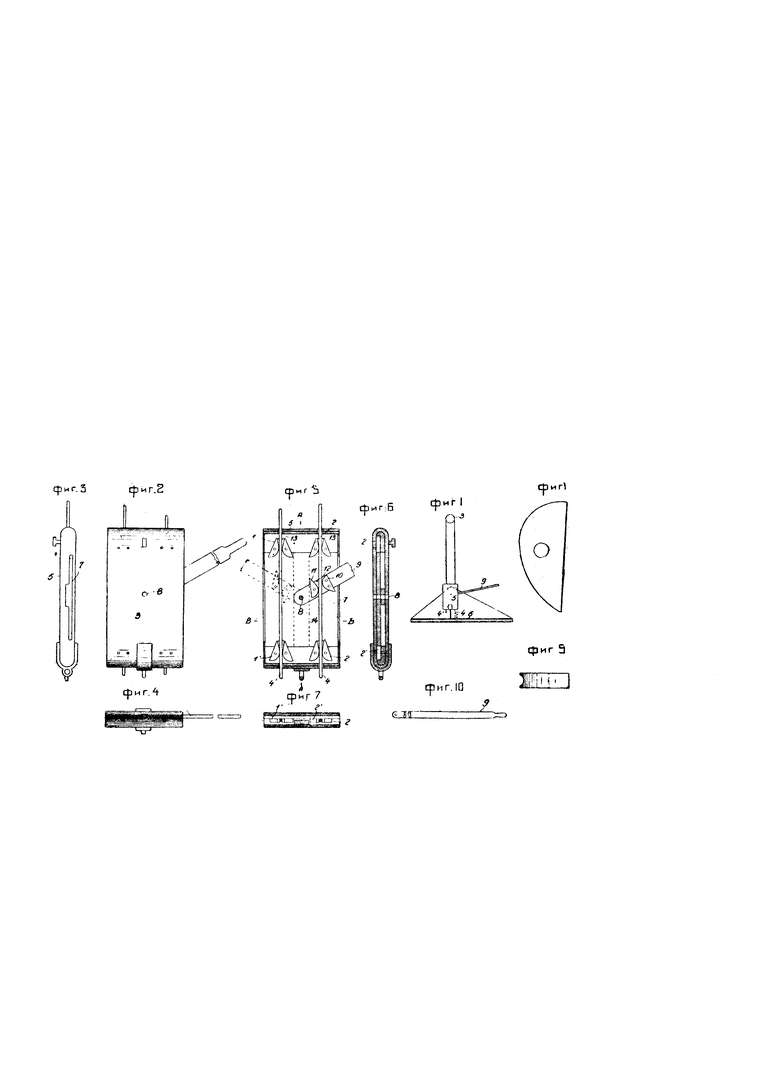
На чертеже фиг. 1 изображает вид подъемника спереди; фиг. 2 - вид обоймы спереди; фиг. 3 - то же, вид сбоку; фиг. 4 - то же, вид сверху; фиг. 5 - продольный вертикальный разрез обоймы; фиг. 6 - разрез по А А на фиг. 5; фиг. 7 - разрез по В В на фиг. 5; фиг. 8 - вид зажимного кулака спереди; фиг. 9 - то же, вид сверху; фиг. 10 - вид рукоятки-рычага спереди.
Через блок 3 перекинут подвесной канат, ветви которого 4 и 41 пропущены через обойму 5; к последней прицеплена грузовая платформа 6. Ветви 4 и 41 каната проходят внутри обоймы 5 между парными криволинейными кулаками 1 и 2 вверху и 11 и 21 внизу, движения которых ограничиваются упорами 13. С боковых сторон обоймы имеются вырезы 7, через которые вставляется и надевается на вставную ось 8 рукоятка-рычаг 9, снабженная криволинейными кулаками 10 и 11, расположенными по сторонам ветви каната. Кулак 10 закреплен на рукоятке неподвижно; движения кулака 11 ограничиваются упором 12.
Когда ветвь 41 каната поднимается вверх, то вследствие трения между ним и криволинейными кулаками, последние зажимают канат, и обойма 5 с платформой поднимается вместе с канатом вверх.
Подъем происходит так. Рукоять 9 силой рабочего опускается вниз, и имеющиеся на рукояти криволинейные кулаки 10 и 11 зажимают канат, так как при опускании рукояти кулак 11, описывая дугу, плотно прижимается к канату и, имея стремление вращаться около оси, нажимает канат к неподвижному кулаку 10. Зажатый канат следует за движением рукояти, благодаря чему получается подъем ветви 41 перекинутого через блок 3 каната, а ветвь 4 скользит между кулаками 2-21, так как упоры 13 не дают кулакам возможности зажать канат и остановить его движение.
Когда рукоять дойдет до предельного нижнего положения и станет подниматься, то сначала ветвь 4 каната несколько пойдет вверх, так как груз прикреплен на ветви 41, но малейшее движение ветви 4 в обратном направлении вызывает в силу трения вращательное движение кулаков 2-21, и канат зажимается.
При опускании нужно рукоять 9 вынуть из обоймы и просунуть ее с другой стороны. Просунув рукоять обратно, вставить ось 8 и начать качания рукояти, но в этом случае холостой ход будет вниз, а рабочий ход рукояти - снизу вверх (на фиг. 5 положение рукояти при опускании вниз показано пунктиром).
Для направления рукояти 9 при ее качаниях внутри обоймы установлена планка 14, через которую пропускается вставная ось 8.
Подъем платформы за один рабочий ход рукояти - 6-8 см.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экскаватор-лопата | 1976 |
|
SU663785A1 |
| СМЕННОЕ ПОГРУЗОЧНОЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ ЭКСКАВАТОРУ | 1969 |
|
SU256654A1 |
| Подвижной подвесной рычажный подъемник | 1931 |
|
SU30411A1 |
| Строительный подъемник | 1980 |
|
SU945042A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305636C1 |
| Манипулятор для погрузки и разгрузки изделий с подвесного конвейера | 1983 |
|
SU1161440A1 |
| РЕЛЬСОПОДЪЕМНИК | 2007 |
|
RU2335594C1 |
| Рабочее оборудование экскаватора | 1981 |
|
SU1033646A1 |
| Траншейный экскаватор | 1979 |
|
SU815154A1 |
| Пассажирский лестничный подъемник | 1959 |
|
SU139789A1 |
1. Подъемник для строительных работ, отличающийся применением подвесной на канате обоймы 5, присоединенной к грузовой платформе и снабженной для каждой из двух ветвей грузового каната, огибающего неподвижный верхний блок 3, парными зажимами, и несущей рукоятку-рычаг 9, в свою очередь также снабженный зажимом и предназначенный при качании его захватывать и перемещать одну из ветвей указанного грузового каната и тем производить укорачивание или удлинение блочной петли этого каната и совершать подъем или спуск обоймы вместе с грузовой платформой.
2. Форма выполнения подъемника по п. 1, отличающаяся тем, что зажимы обоймы 5 выполнены в виде поворотных криволинейных кулаков или колодок 1-2 и 11-21, снабженных упорами 13 для ограничения их поворота, а зажим на рукоятке-рычаге состоит из неподвижно на нем закрепленного криволинейного кулака или колодки 10 и поворотного криволинейного кулака или колодки 11.
