И13015ретен1ие относится к о-бласти а,втоматичеокого контроля систем управления.
Известен cinocoi6 выявления углО1В.01Го рассо гласавания лараллелыню -включенных датчиков, при котором выходные си.пналы датчиков падают на вы.прямйтели, включенные в диа1го.нал-и мостов, о бразаваадных статорнь ми обмот1ка-ми и включениьгми последавательно с ними резисто.р.амИ, что П0з;воляет-выявля,ть .раюсогласование, обрьш или короткое за.мыкаиие любой обмоши дат1чи1КО в.
Однако известный способ не может быть иапользовав При контроле датчиков с изменяющейся, например, в Слеяст1Вие из1менения ла1лрузо1К или напряжения , крутизной.
Предлагаемый способ может быть применен в указанных усло1виях и позволяет повысить Точность определения рассогласования 1взаи1мн0го углового положения датчиков.
Это Дости1гает1ся применением цепей, преОбразующих сипналы датчи|ко1в угла в дискретные эначения углов.
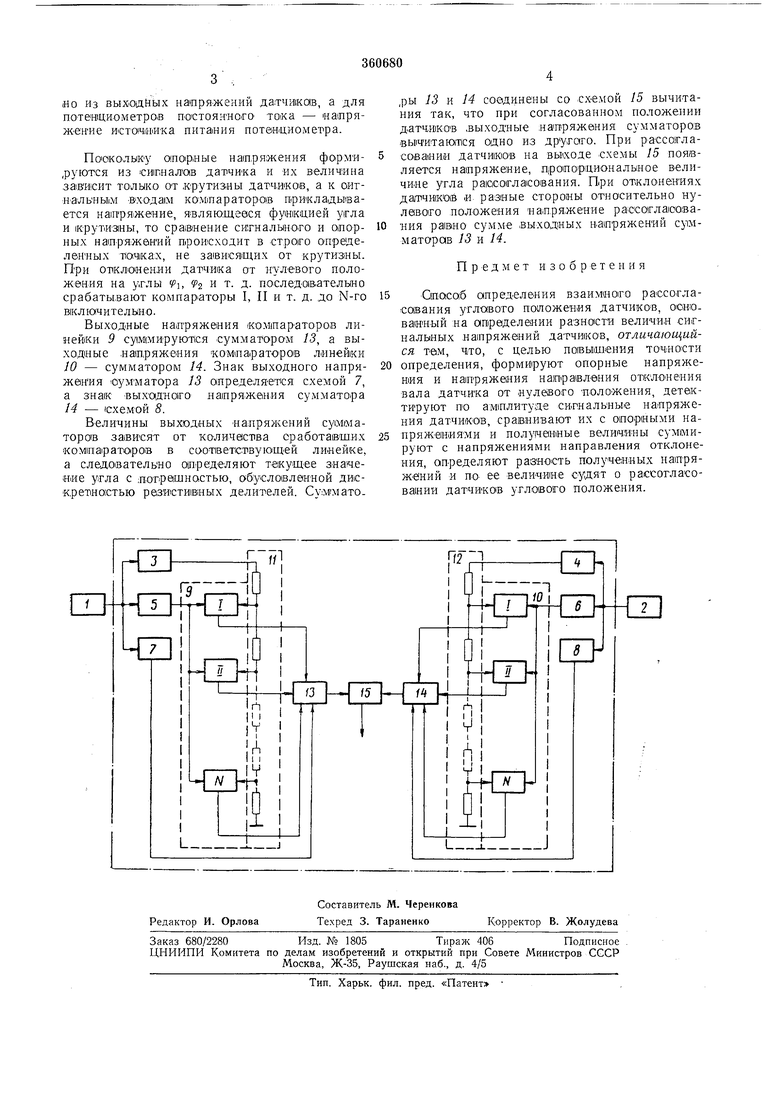
На чертеже приведена блак-схема уюта«ав1ки, позволяющей--реализовать предлагаемый -апоюоб йзмереиий.
Уста1НОВ1ка содержит датчик /и 2 измеряемых угловых величИН, формирователи 3 и 4 апориых напряжений, амолйтуйные детекторы 5 и 6, схемы 7 и S знака, линейки 9
я 10 компараторов, резистввные делштели 11 II 12, су1М маторы 13 и 14 схему 15 вычитания.
Вы.х:од:ные напряжения датчиков 1 и 2 подают на формирователи 3 и 4 опорных напряжений, амплитудные детекторы 5 и 6 и схемы-апределители знака 7 и S.
Формирователи опорных напряжений вырабатывают натряжения, пр01пор:циональные
крутизне датчиков. Схемы 7 и S определяют на1правление отклонения датчиков угла от нулевого полож-ения.
Формирователи нагружены на резистивные делители II и 12, выходы которых подсоединены к оюсрным входам линеек комлараторав 9 и 10. Выход детектора 5 соединен с си1пнальны.ми входами линейки 9, выход деT0KToipa 6 с си.лналыными входа1ми линейки 10.
Выходное напряжение несра ботавших компараторов равно О (низкий уровень). Компараторы срабатывают при равенст1ве сигнального и опорного напряжений. Выходные нап ряженйя всех сработавших компараторов
(высокий ypoeetib) равны.
Опорное напряжение для датчиков типа СКТ-сельсин формируется путем суммирования выходных напряжений датчиков после их амплитудного детектирования. В ряде слу.
но из выходйых напряжений даичикав, а для потеициометро.в постоянного тока - «апряЖение Истоганлка питания потенциометра.
ПоюкОЛЬку oinoipHbie на1П,ря:жения форми,руются из сишналав датчика и их величина завиюит только от крутизны датчиков, а к оигНальны|М Входай ко .здпараторов Hip вкладывается на1нря1жение, являющееся функцией угла и крутизны, то сраганение си;гналыного и апориых напряжений врои сходит в строго Онределенных тач1ка.х, не зависящих от крутизны. При отклонении датчика от нулевого положения на у.глы v, fz и т. д. последойлтелыно срабатывают компар1аторы I, II и т. д. до N-ro включительно.
Выходные напряжения ком1параторов линейки 9 су|мширую-т1ся сумматорОМ /5, а выходные .напряжения к о ар а торов линейки 10 - сумматором 14. Знак выходного напряжения Оумматора 13 оюределя ется схемой 7, а знак выходного напряжения сумматора 14 - юхемой 8.
Величины выходных -напряжений сумматоров зависят от количества сработавщих комшараторо в соответствующей линейке, а следовательно определяют текущ-ее значение угла с лограшностью, обусловленной дискретностью резистивеых делителей. Сулгмато,ры 13 и 14 соединены со схемой 15 вычитания так, что при согласованном положении датчиков выходные напряжения сумматоров вы1Читаю1Т1ся одно из другого. При рассогласовании датчиков на вьиходе схемы 15 появляется напряжение, пропорциональное величине угла раюсогласования. При отклонениях датчиков и разеые стороны относительно нулевого положения напряжение рассоглаоования равно сумме выходных напряжений сумматоров 13 и 14.
Предмет изобретения
Опасаб определения взаимного рассогласавания углового положения датчиков, оснюванный на ооределении разности величин сигнальных напряжений датчиков, отличающийся там, Ч(То, с целью по1вы1шения точности
определения, формируют опорные напряжения и напряжения направления отклонения вала датчика от иулввого положения, детактируют по ам1плитуде сигнальные напряжения датчиков, сравнивают их с опорными напряжениями и полученные величины суммируют с напряжениями направления отклонения, определяют рази-ость полученных натряЖвний и по ее величине судят о рассогласовании датчиков углового положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ВЫЯВЛЕНИЯ ВЗАИМНОГО УГЛОВОГО РАССОГЛАСОВАНИЯ ДАТЧИКОВ УГЛОВОГО ПОЛОЖЕНИЯ | 1973 |
|
SU378934A1 |
| Устройство для контроля датчиков углового положения | 1974 |
|
SU481060A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ЦИФРОВОЙ | 1973 |
|
SU408357A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ЗАДАННЫХ УГЛОВ | 1972 |
|
SU329553A1 |
| БЛОК КОНТРОЛЯ ДВУХ КУРСОВЕРТИКАЛЕЙ | 2002 |
|
RU2227934C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| Устройство для измерения характеристик внутреннего трения | 1987 |
|
SU1552067A1 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2002 |
|
RU2231015C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| СПОСОБ СИНТЕЗИРОВАНИЯ ПОЛОЖЕННОЙ ОТНОСИТЕЛЬНОЙ ПЕЛЕНГАЦИОННОЙ ХАРАКТЕРИСТИКИ СТАТИЧЕСКОГО АМПЛИТУДНОГО ДАТЧИКА ФАСЕТОЧНОГО ТИПА ОТДАЛЁННОГО ИСТОЧНИКА ЛУЧИСТОГО ПОТОКА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2016 |
|
RU2610135C2 |
