1
Изобретение относится к устройствам для натяжения транспортируемого материала и поддержания его в натянутом состоянии в процессе технологической обработки.
Известен регулятор натяжения полосы, содержащий подвешенный на системе рычагов нажимной ролик, уравновешенный контргрузом, расположенным с одной стороны от оси несуш;его рычага. Однако в нем исключается возможность дистанционного изменения заданного натяжения при переходе с обработки одного сортамента ленты на другой.
Предложенный регулятор отличается от известного тем, что он снабжен ограничителем хода, а несуший рычаг снабжен сег.ментами, укрепленными вместе с контргрузом на ползуне, перемещаемом в направляющих несущего рычага с помощью следящего привода, а в верхней части сегментов укреплены гибкие канаты, удерживающие контргруз. Это обеснечивает поддержание постоянного натяжения ленты в процессе термообработки.
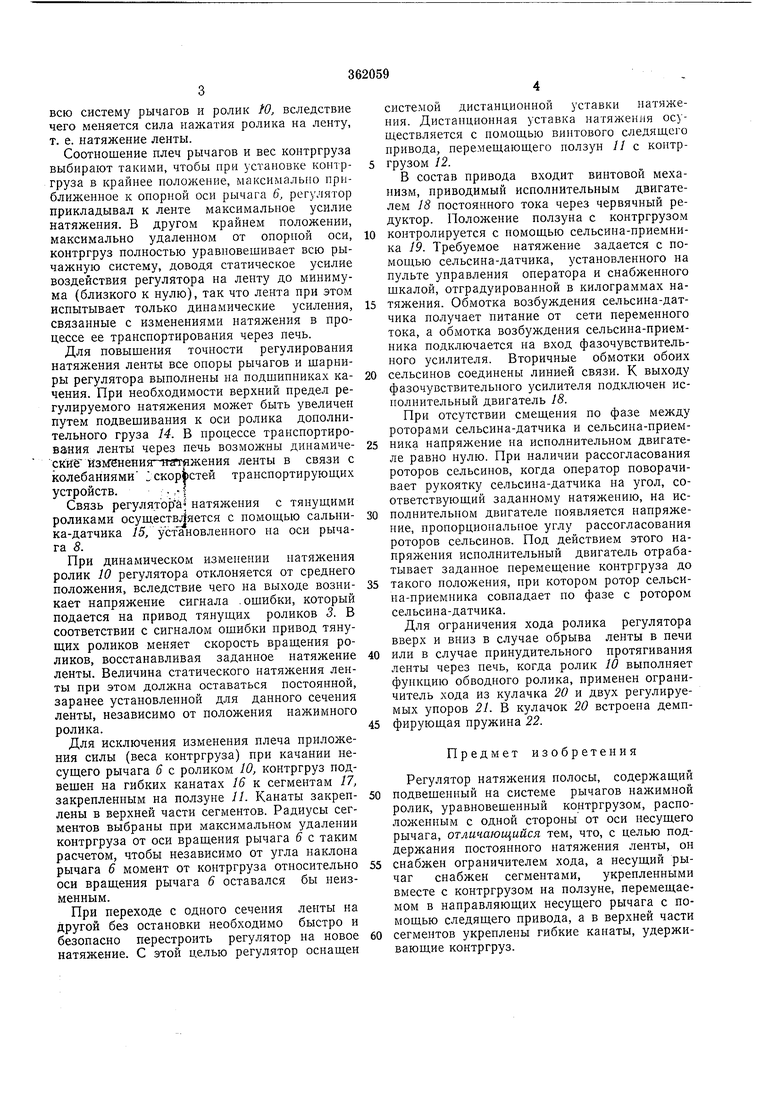
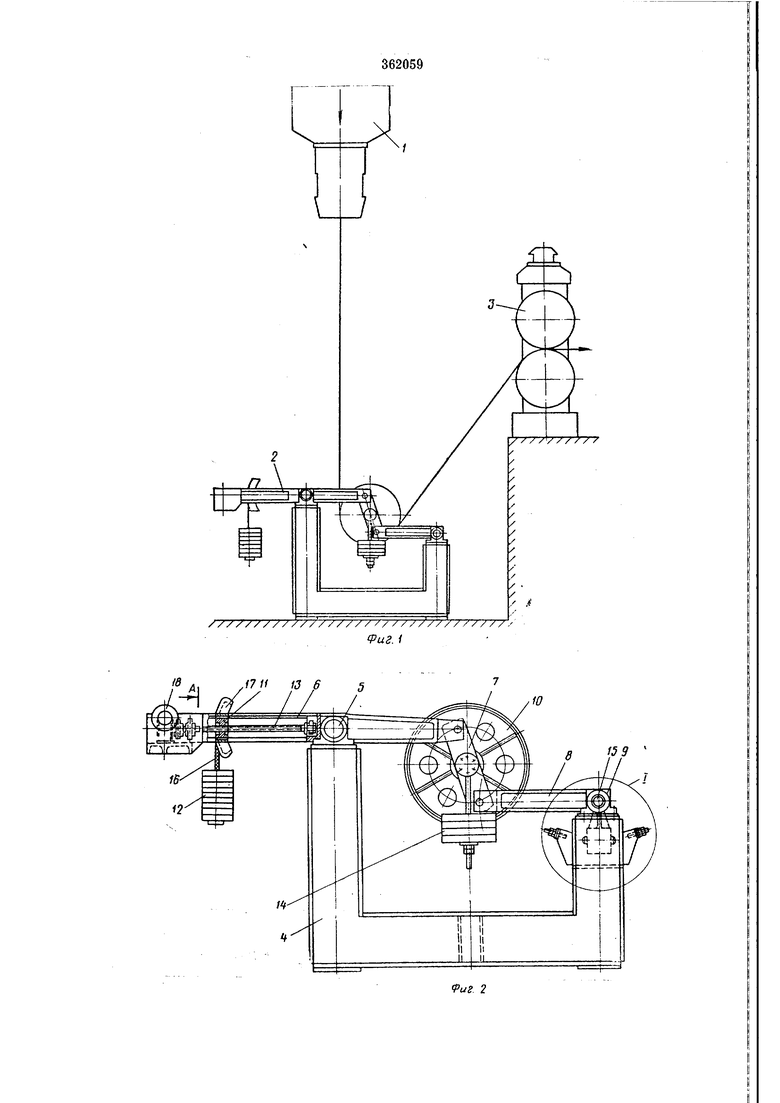
На фиг. 1 показана компановка регулятора в агрегате для непрерывной термообработки стальной ленты; на фиг. 2 - собственно регулятор натяжения; на фиг. 3 - разрез по А-А на фиг. 2; «а фиг. 4 - узел 1 на фиг. 2.
Регулятор представляет собой четырехзвенный П1арнирный приближенно-направляющий
механизм с укрепленным на нем нажимным роликом.
Лента, выходящая из высокотемпературной печи /, натягивается под действием собственного веса и дополнительно роликом регулятора 2 натяжения; затем лента протягивается тянущими роликами 3 в хвостовую часть агрегата. На станине 4 в подшипниках качения 5 установлен несущий рычаг 6. К рычагу 6 щарнирно подвещены два промежуточных рычага 7, концы которых щарнирно соединены с удерживающим рычагом 8, установленным в подщипниках качения 9 на станине 4. Между
двумя промежуточными рычагами 7 в подшипниках качения установлен нажимной ролик 10, ось подшипников которого проходит через центры рычагов 7. Соотношение размеров всех звеньев выбрано таким, что ось нажимного ролика может перемешаться в вертикальной плоскости по приближенной прямой, параллельной вертикальной оси печи.
На несуще.м рычаге 6 в направляющих установлен ползун // с контргрузом 12. Ползун // может перемещаться по направляющим с помощью винтового привода 13.
Передвигая ползун // с контргрузом 12 в различные нолол ения, изменяют плечо приложения силы, частично уравновешивающей
всю систему рычагов и ролик tO, вследствие чего меняется сила нажатия ролика на ленту, т. е. натяжение ленты.
Соотношение плеч рычагов и вес контргруза выбирают такими, чтобы при установке коптргруза в крайнее положение, максимально приближенное к опорной оси рычага 6, регулятор прикладывал к ленте максимальное усилие натяжения. В другом крайнем положении, максимально удаленном от опорной оси, контргруз полностью уравновешивает всю рычажную систему, доводя статическое усилие воздействия регулятора на ленту до минимума (близкого к нулю), так что лента при этом испытывает только динамические усиления, связанные с изменениями натяжения в процессе ее транспортирования через печь.
Для повышения точности регулирования натяжения ленты все опоры рычагов и шарниры регулятора выполнены на подшипниках качения. При необходимости верхний предел регулируемого натяжения может быть увеличен путем подвешивания к оси ролика дополнительного груза 14. В процессе транспортирования ленты через печь возможны динамическиё йзьГ5нения 1татяжения ленты в связи с колебаниями скорЬстей транспортируюш,их устройств.,Связь регулятора натяжения с тянуш;ими роликами осуществляется с помош,ыо сальника-датчика 15, установленного на оси рычага 5.
При динамическом изменении натяжения ролик 10 регулятора отклоняется от среднего положения, вследствие чего на выходе возникает напряжение сигнала .ошибки, который подается на привод тянуш,их роликов 3. В соответствии с сигналом ошибки привод тянущих роликов меняет скорость вращения роликов, восстанавливая заданное натяжение ленты. Величина статического натяжения ленты при этом должна оставаться постоянной, заранее установленной для данного сечения ленты, независимо от положения нажимного ролика.
Для исключения изменения плеча приложения силы (веса контргруза) при качании несущего рычага б с роликом W, контргруз подвешен на гибких канатах 16 к сегментам 17, закрепленпым на ползуне 11. Канаты закреплены в верхней части сегментов. Радиусы сегментов выбраны при максимальном удалении контргруза от оси вращения рычага 6 с таким расчетом, чтобы независимо от угла наклона рычага б момент от контргруза относительно оси вращения рычага 6 оставался бы неизменным.
При переходе с одного сечения ленты на другой без остановки необходимо быстро и безопасно перестроить регулятор на новое натяжение. С этой целью регулятор оснащен
системой дистанционной уставки натяжения. Дистанционная уставка натяжения осуществляется с номощью винтового следящего привода, перемещающего ползун 11 с коптргрузом 12.
В состав привода входит винтовой механизм, приводимый исполнительным двигателем 18 постоянного тока через червячный редуктор. Положение ползуна с контргрузом
контролируется с помощью сельсина-приемника 19. Требуемое натяжение задается с помощью сельсина-датчика, установленного на пульте управления оператора и снабженного шкалой, отградуированной в килограммах натяжения. Обмотка возбуждения сельсина-датчика получает цитание от сети переменного тока, а обмотка возбуждения сельсина-приемника подключается на вход фазочувствительного усилителя. Вторичные обмотки обоих
сельсинов соединены линией связи. К выходу фазочувствительного усилителя подключен исполнительный двигатель 18.
При отсутствии смещения по фазе между роторами сельсина-датчика и сельсина-приемпика напряжение на исполнительном двигателе равно нулю. При наличии рассогласования роторов сельсинов, когда оператор поворачивает рукоятку сельсина-датчика на угол, соответствующий заданному натяжению, на иснолнительном двигателе появляется напряжение, пропорциопальпое углу рассогласования роторов сельсинов. Под действием этого напряжения исполнительный двигатель отрабатывает заданное перемещение контргруза до
такого положения, при котором ротор сельсина-приемника совпадает по фазе с ротором сельсина-датчика.
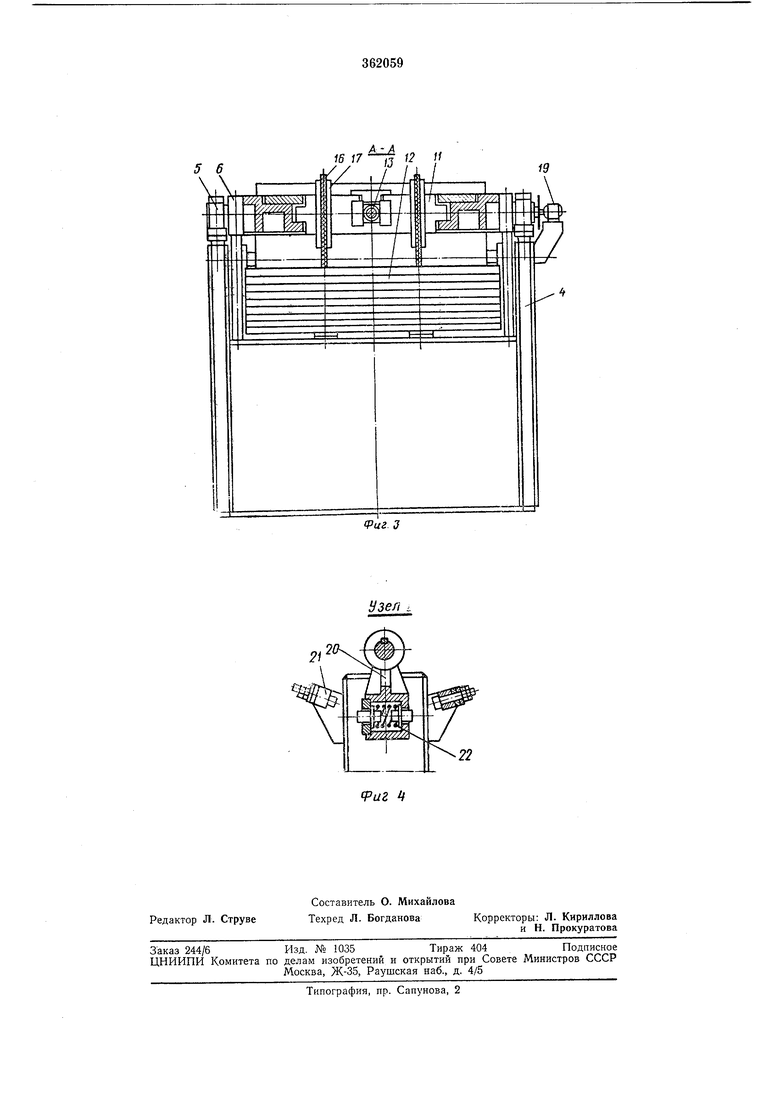
Для ограничения хода ролика регулятора вверх и вниз в случае обрыва ленты в печи
или в случае принудительного протягивания ленты через печь, когда ролик 10 выполняет функцию обводного ролика, применен ограничитель хода из кулачка 20 и двух регулируемых упоров 21. В кулачок 20 встроена демпфирующая пружина 22.
Предмет изобретения
Регулятор натяжения полосы, содержащий подвешенный на системе рычагов нажимной ролик, уравновешенный контргрузом, расположенным с одной стороны от оси несущего рычага, отличающийся тем, что, с целью поддержания постояпного натяжения ленты, он снабжен ограничителем хода, а несущий рычаг снабжен сегментами, укрепленными вместе с контргрузом на ползуне, перемещаемом в направляющих несущего рычага с помощью следящего привода, а в верхней части сегментов укреплены гибкие канаты, удерживающие контргруз.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШПУЛЕДЕРЖАТЕЛЬ РОТОРА МАШИНЫ ДЛЯ ИЗОЛЯЦИИ НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 2005 |
|
RU2300690C2 |
| Приемно-подающий узел | 1983 |
|
SU1084880A1 |
| Машина для обслуживания алюминиевых электролизеров с обожженными анодами | 1973 |
|
SU548663A2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ НИТИ В МОТАЛЬНОЙ ГОЛОВКЕ | 1971 |
|
SU311845A1 |
| Приемно-подающий узел | 1983 |
|
SU1134961A1 |
| Канатовьющая машина | 1983 |
|
SU1127933A1 |
| Устройство для определения глубины черпания дражного забоя | 1980 |
|
SU937621A1 |
| Люнет для металлорежущих станков | 1978 |
|
SU733958A1 |
| Ограничитель грузоподъемности крана | 1959 |
|
SU125659A1 |
| Система управления влажностью жил на бумагомассной машине | 1988 |
|
SU1644105A1 |
/J/5 н / / / , /. ., Л УХ/ / ., I Z f-,
2i
12 11
16 17
Узел ,
22
(риг
