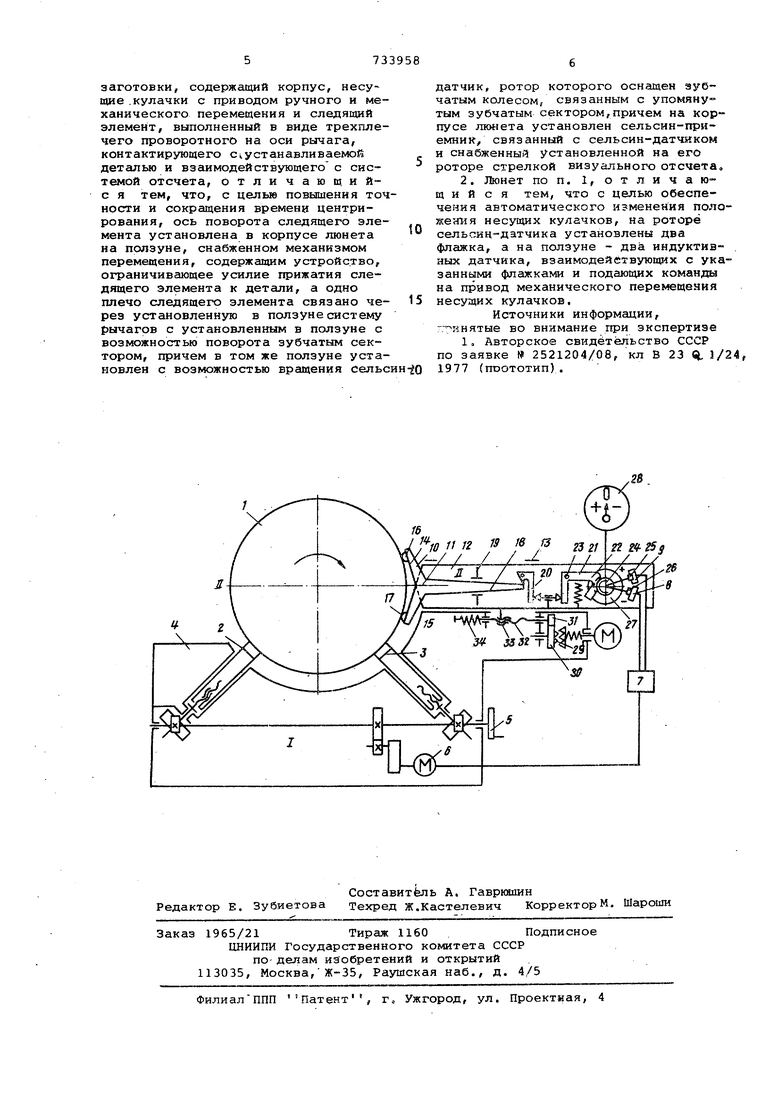
Изобретение относится к области машиностроения, преи щественно к станкостроению и может быть использо вано в металлорежущих станках, Известен люнет металлорежущих станков с горизонтальной осью вращения заготовки, содержащий корпус, несущие кулачки с приводом ручного и механического перемещения и следящий элемент, выполненный в виде тре плечевого поворотного на оси рычага .контактирующего с установленной деталью и взаимодействующего с системой отсчета 1. . Однако такой люнет не обеспечива ет трудоемкой операции по установке делали на ось станка и не обеспечивает необходимой точности установки Целью изобретения является повыщение точности и сокращение времени центрирования. Это достигается тем, что ось пово рота следящего элемента устанавливается в корпусе-.люнета на ползуне, снабженном механизмом перемещения, содержащим устройство, ограничивающее усилие прижатия следящего элемен та к детали, а одно из плеч следящего элемента связано через установленную на ползуне систему рычагов с установленным в ползуне с возможностью поворота зубчатым сектором, причем в том же ползуне установлен с возможностью вращения сельсин-датчик, ротор которого оснащен зубчатым колесом, связанным с упомянутым зубчатым сектором, причем на корпусе люнета установлен сельсин-приемник, связанный с сельсин-датчиком и снабженный установленной на его роторе стрелкой визуального отсчета. Кроме того, для автоматического изменения положения несущих кулачков на роторе сельсин-датчика установлены два флажка, а на ползуне - два индуктивных датчика, взаимодейству ощих с указанными флажками и подающих команды на привод механического перемещения несущих кулачков. На чертеже изображен предлагаемый люнет. Заготовка 1 устанавливается проточенной шейкой на несущие кулачки 2 и 3, установленные симметрично оси I-I в корпусе 4 люнета и кинематически соединенные с маховичком 5 ручного перемещения и электроприводом 6. Электропривод электричпск свя..:1и с усилителем 7 и индуктивными датчи1 ами 8 и 9. Следящий элемент выполнен в виде поворотного трехплечего р чага 10, установленного на оси 11 закрепленной на ползуне 12, установленном в горизонтальных направляющих 13 корпуса 4, и размещенной в горизонтальной плоскости П-И , про(ходящей через ось центров станка. В среднем положении рычага 10 два ег плеча 14 и 15 расположены ./симметрич но ш1Оскости11-Г1. На концах плечей 14 и 15 имеются измерительные контак ты 16 и 17, образующие призму, базирующая поверхность которой .-обращена к заготовке 1. Третье место 1.8 распо ложено между группой ограничителей 19 угла поворота рычага и соединено через дополнительную систему рьгчагов 20 и 21 с зубчатым сектором 22 на оси .3 и зубчатым колесомна оси 24. На оси 24 установлены флажки 25 и 26 индуктивных датчиков 8 и 9, связанных с приводом через усилитель 7. В случае дистанционного управления на оси 24 установлен сель син-датчик 27, связанный с сельсинприемником 28, который на своей Оси имеет стрелку и шкалу, показывающую визуально отклонение положения оси заготовки относительно оси центров станка. При отсутствии необходимости дистанционного управления стрел. ка визуального отсчета положения за готовки устанавливается непосредственно на оси 24. Контакты 16 и 17 трехплечевого рычага прижимаются к. детали 1 с тарированным постоянным усилием через механизм перемещения ползуна, включающий муфту предельного крутящехО момента 29, зубчатые колеса 30 и 31, винт 32 перемещения ,и гайки 33с Механизм перемещения ползуна содержит устройство, ограничивающее усилие прижатия следящего элемента к детали бл-агодаря установке пружины 34 и податливой в осевом направлении одной из опор винта 32, Это .необходимо для предупреждения полом ки контактов-следящего элемента и для сохранения заданного усилия прижатия контактов следящего элемента. Центрирование заготовки 1 осущест ляется либо в режиме ручного управ. ления, либо автоматически. В обоих случаях кулачки 2 и 3 устанавливают ся таким образом, чтобы при их одно эр .мен ном перемещении ось заготоь;.и 1, расположенная в вертикальной пло кости, проходящей через ось центров станка, смещалась бы только в вертикальном положении. описание работы устройства дано для случая, когда ось заготовки расположена ниже оси центров, причем величина смещения не превьшает поло бины расстояния между контактами следящего устройства. При перемещеИИ ползуна 12 справа налево (по чережу) рычаг касается заготовки 1 начала нижним контактом 17, а,затем ерхним - 16 , - При значительных отконениях оси заготовки 1 относительо оси центров плечо 18 рычага упиается в верхний ограничитель 19, при этом верхний контакт 16 заготовки 1 не касается. При поджиме обоих контактов к детали 1 муфта предельного крутящего момента 29 срабатывает при достижении нужной силы контакта некоторого сжатия пружины 34 за счет осевого смещения винта 32 слева направо (по чертежу), что достигается наладкой. При повороте рычага вокруг оси 11 плечо 18 через систему рычагов 20 и 21 и зубчатого сектора 22 приводит во вращение ось 24 сельсин-датчика и ось, связанного с ним сельсин-приемника 28. В случае ручного управленият заготовку 1 перемещают путем вращения маховичка 5, при этом кулачки 2 и 3 поднимают заготовку 1 рычаг поворачивается по часовой стрелке, что фиксируется на щкале сельсин-приемника 28. Заготовку поднимают до тех пор, пока плечи 14 и 15 в виде призмы не займут симметричного положения относительно горизонтальной плоскости II-II. При этом стрелка сельсин-приемяика устанавливается на ноль шкалы, что показывает совмещение оси детали с осью центров станка. : При автоматическом управлении, когда ось заготовки 1 находится ниже оси центров, стрелка сельсин-приемника 28 отклонена в сторону минус г при этом включением кнопки управления вверх, осуществляется вращение привода в соответствующую сторону и подъем заготовки вверх до положения, в котором под действием поворота рычага срабатывает нижний конечньлй индуктивный датчик 8, а стрелка указателя совместится с нулем Устройство работает аналогично описанному и в том случае, когда-ось центрируемой детали расположена выше оси центров. В этом случае ограничение опускания детали осуществляется верхним конечньзм индуктивным датчиком 9. Предлагаеьмй люнет позволит обрабатывать крупногабаритные заготовки с горизонта,льной осью вращения. Кроме того, предлагаемая конструкция люнета позволяет значительно сократить время, центрования заготовки в 3-4 раза при одновременном уменьшении погрешности в совмещении оси заготовки с осью центров станка в 2-8 раза. Формула изобретения 1. ЛЬонет для металлорежущих -тан ков с горизонтальной осью вращения заготовки, содержащий корпус, несущие .кулачки с приводом ручного и механического перемещения и следящий элемент, выполненный в виде трехплечего проворотного на оси рычага, контактирующего с устанавливаемой деталью и взаимодействующегос системой отсчета, отличаю щи йс я тем, что, с целью повышения точ ности и сокращения времени центрирования, ось поворота следящего элемента установлена в корпусе люнета на ползуне, снабженном механизмом перемещения, содержащим устройство, ограничивающее усилие прижатия следящего Элемента к детали, а одно плечо следящего элемента связано через установленную в ползуне систему рычагов с установленным в ползуне с возможностью поворота зубчатым сектором, причем в том же ползуне установлен с возможностью вращения сельс датчик, ротор которого оснащен зубчатым колесом/ связанным с упомянутым зубчатым сектором,причем на корпусе люнета установлен сельсин-приемник, связанный с сельсин-датчиком и снабженный установленной на его роторе стрелкой визуального отсчета, 2. Люнет по п. 1, отличаю щ и и с я тем, что с целью обеспечег ия автоматического изменения положения несущих кулачков, на роторе сельсин-датчика установлены два флажка, а на ползуне - два индуктивных датчика, взаимодействующих с указанными флсжками и подающих команды на привод механического перемещения несущих кулачков. Источники информации, ггкнятые во внимание при экспертизе 1, Авторское свидетельство СССР по заявке 2521204/08, кл В 23 fit 1/24, 1977 (шэототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимное устройство | 1981 |
|
SU1009630A1 |
| Устройство для центрирования изделия при зажиме | 1981 |
|
SU1000158A1 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
| РЕГУЛЯТОР НАТЯЖЕНИЯ ПОЛОСЫ—асьиок?3!-!дя 11ДТ?НТЙМЕ|дЩС?Ш | 1973 |
|
SU362059A1 |
| Правильный пресс | 1978 |
|
SU770602A1 |
| СПОСОБ ОБРАБОТКИ ПОВЕРХНОСТИ ВРАЩЕНИЯ ИЗДЕЛИЯ И ЛЮНЕТ | 1999 |
|
RU2145917C1 |
| "Устройство для шлифования гнутых деталей из древесины "Адзура" | 1990 |
|
SU1776223A3 |
| Установка для зачистки сварных швов | 1979 |
|
SU821109A1 |
| СПОСОБ ТОКАРНОЙ И/ИЛИ ФРЕЗЕРНОЙ ОБРАБОТКИ РОТОРОВ ТУРБИН И КРУПНОГАБАРИТНЫХ ВАЛОВ | 2015 |
|
RU2606689C2 |
| Устройство к круглошлифовальному станку для быстрого подвода шлифовального круга к заготовке и регулирования положения относительно ее оси губок упорного люнета | 1959 |
|
SU126756A1 |
