Известны электроприводы для перемещения деформируемых материалов, выполненные с применением общего электрогенератора, питающего последовательно соединенные приводные электродвигатели механизмов, транспортирующих материал. В частности, известен многодвигательный электропривод постоянного тока для обработки в процессе перемещения гибкого деформируемого материала, преимущественно ткани, содержащий несколько пар электродвигателей с последовательным соединением якорных цепей, подключенных к общему источнику питания, и датчики натяжения перемещаемого материала, каждый из которых воздействует на регулятор скорости одной из пар двигателей. В результате исследования подобных структур установлено, что группы механизмов, объединенные контуром регулирования по нагрузке должны разделяться промежутками со свободной петлей материала (регулирование по отклонению). Такой метод комбинированного регулирования позволяет получить хорощий результат при наиболее простых, дещевых и надежных устройствах автоматизации. Наиболее существенным возмущением, влияющим на величину статической ощибки по натяжению материала между механизмами в подобных системах, является изменение момента статического сопротивления механизмов. Влияние этого возмущения в системе привода может быть скомпенсировано специальной уравнительной силовой цепью. В этом случае согласование скоростей электродвигателей производится оператором вручную путем изменения сопротивления уравнительной цепи, влияющего на распределение нагрузок (перераспределение токов) между двигателями. Таким образом, автоматизация регулирования напряжения материала в зонах и синхронизация скоростей электродвигателей рещаются не как частные задачи управления на отдельных участках технологических линий, а комплексно в их взаимосвязи для всей линии. Общими признаками, характеризующими наиболее совершенные известные системы электропривода, являются наличие групп (секций) электродвигателей с последовательным соединением якорных цепей, разделенных промежутками со свободной петлей материала; наличие Зфавнительных цепей для перераспределения токов в якорных цепях электродвигателей секции в соответствии с изменяющимися моментами сопротивления механизмов. Таким образом в описанных устройствах преимущества регулирования по нагрузке (простота, повышенное быстродействие и устойчивость) проявляются лишь внутри секций.
так же как и преимущество регулирования по отклонению (точность поддержания натяжения материала) характерно лишь для зон между секциями. Использование уравнительных цепей, управляемых оператором вручную на высоких скоростях не обеспечивает должного быстродействия и точности работы САУ и связано с дополнительными потерями энергии в сопротивлениях.
Этих недостатков не имеет предлагаемый многодвигательный электропривод для транспортировки ткани, который для всех зон обработки автоматически обеспечивает необходимую точность поддержания натяжения материала, а также повышенное быстродействие и устойчивость САР. Это обеспечивается тем, что электропривод снабжен дополнительными регуляторами скоростей по числу приводных двигателей, каждый из которых подключен параллельно относящемуся к нему двигателю, причем ко входу каждого из дополнительных регуляторов подключен соответствующий датчик натяжения.
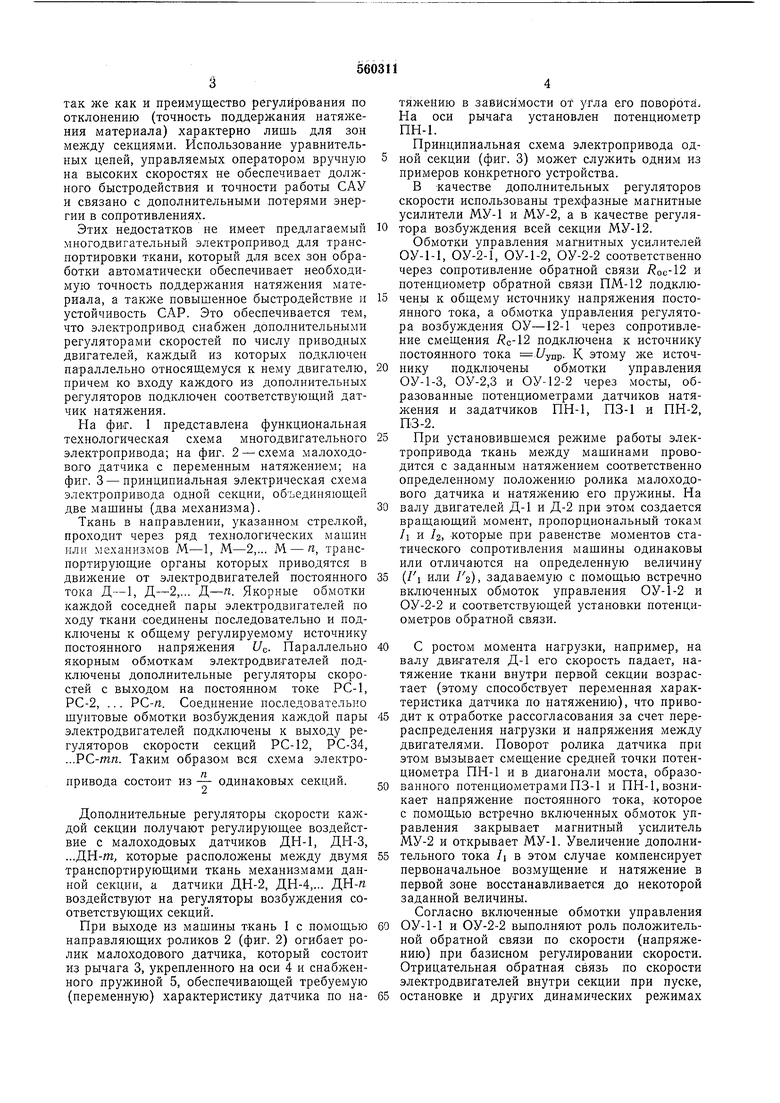
На фиг. 1 представлена функциональная технологическая схема многодвигательного электропривода; на фиг. 2 - схема малоходового датчика с переменным натяжением; на фиг. 3 - принципиальная электрическая схема электропривода одной секции, объединяющей две машины (два механизма).
Ткань в направлении, указанном стрелкой, проходит через ряд технологических машин или механизмов М-1, М-2,... М - я, транспортирующие органы которых приводятся в движение от электродвигателей постоянного тока Д-1, Д-2,... Д-«. Якорные обмотки каждой соседней пары электродвигателей по ходу ткани соединены последовательно и подключены к общему регулируемому источнику постоянного напряжения f/c- Параллельно якорным обмоткам электродвигателей подключены дополнительные регуляторы скоростей с выходом на постоянном токе РС-1, РС-2, ... РС-п. Соединение последовательно шунтовые обмотки возбуждения каждой пары электродвигателей подключены к выходу регуляторов скорости секций PC-12, РС-34, ...РС-тп. Таким образом вся схема электропривода состоит из - одинаковых секций.
Дополнительные регуляторы скорости каждой секции получают регулирующее воздействие с малоходовых датчиков ДН-1, ДН-3, ...ДН-т, которые расположены между двумя транспортирующими ткань механизмами данной секции, а датчики ДН-2, ДН-4,... ДН-п воздействуют на регуляторы возбуждения соответствующих секций.
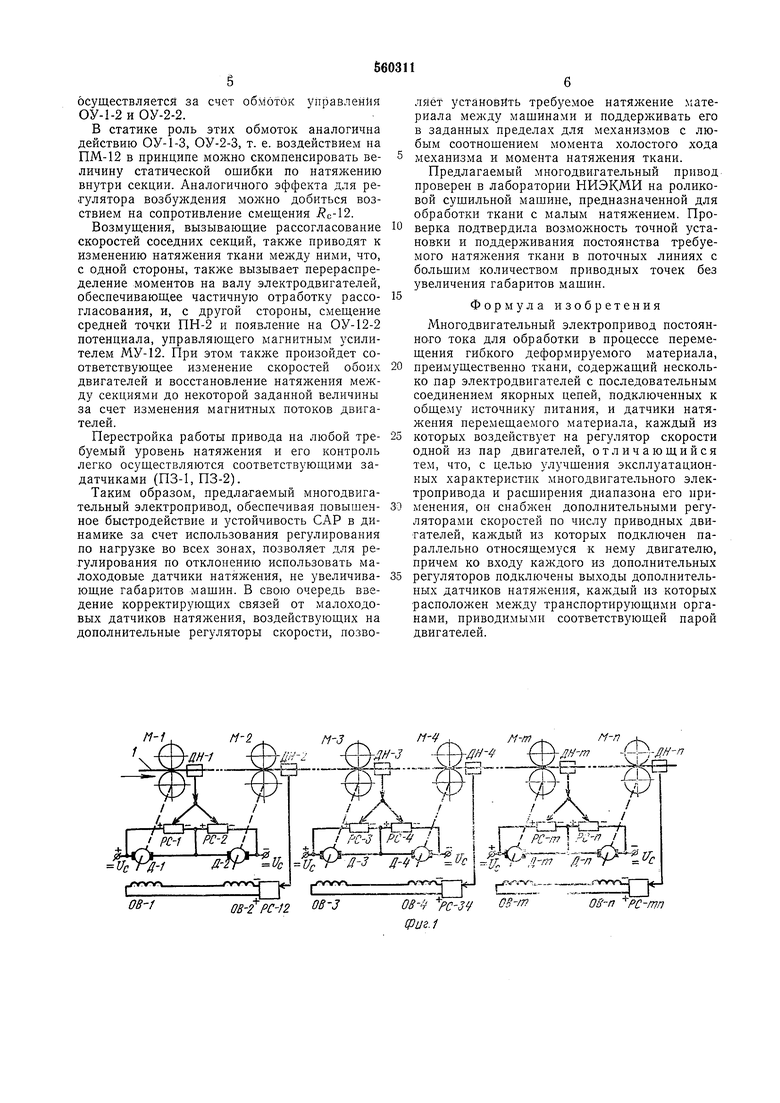
При выходе из машины ткань 1 с помощью направляющих роликов 2 (фиг. 2) огибает ролик малоходового датчика, который состоит из рычага 3, укрепленного на оси 4 и снабженного пружиной 5, обеспечивающей требуемую (переменную) характеристику датчика по натяжению в зависимости от угла его поворота. На оси рычага установлен потенциометр ПН-1.
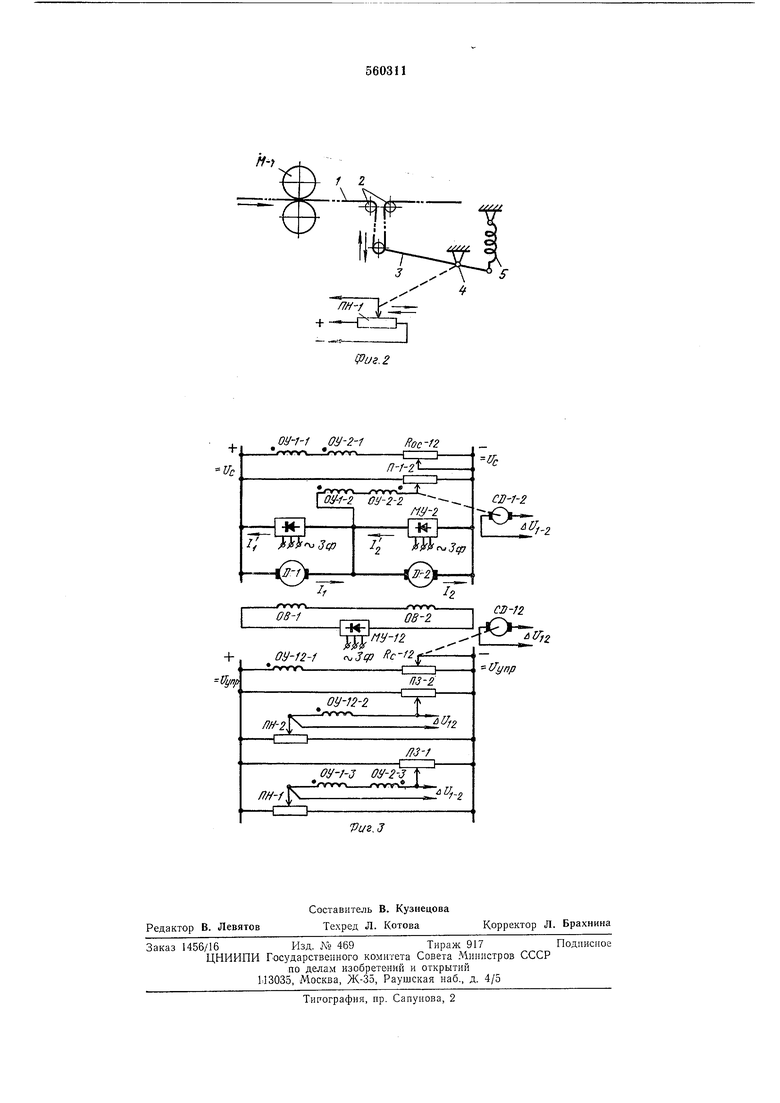
Принципиальная схема электропривода одной секции (фиг. 3) может служить одним из примеров конкретного устройства.
В качестве дополнительных регуляторов скорости использованы трехфазные магнитные усилители МУ-1 и МУ-2, а в качестве регулятора возбуждения всей секции МУ-12.
Обмотки управления магнитных усилителей ОУ-1-1, ОУ-2-1, ОУ-1-2, ОУ-2-2 соответственно через сопротивление обратной связи и потенциометр обратной связи ПМ-12 подключены к общему источнику напряжения постоянного тока, а обмотка управления регулятора возбуждения ОУ-12-1 через сопротивление смещения подключена к источнику постоянного тока : 1/упр. К этому же источнику подключены обмотки управления ОУ-1-3, ОУ-2,3 и ОУ-12-2 через мосты, образованные потенциометрами датчиков натяжения и задатчиков ПН-1, ПЗ-1 и ПН-2, ПЗ-2.
При установившемся режиме работы электропривода ткань между машинами проводится с заданным натяжением соответственно определенному положению ролика малоходового датчика и натяжению его пружины. На валу двигателей Д-1 и Д-2 при этом создается вращающий момент, пропорциональный токам /1 и /2, которые при равенстве моментов статического сопротивления мащины одинаковы или отличаются на определенную величину (Il или /2), задаваемую с помощью встречно включенных обмоток управления ОУ-1-2 и ОУ-2-2 и соответствующей установки потенциометров обратной связи.
С ростом момента нагрузки, например, на валу двигателя Д-1 его скорость падает, натяжение ткани внутри первой секции возрастает (этому способствует переменная характеристика датчика по натяжению), что приводит к отработке рассогласования за счет перераспределения нагрузки и напряжения между двигателями. Поворот ролика датчика при этом вызывает смещение средней точки потенциометра ПН-1 и в диагонали моста, образованного потенциометрами ПЗ-1 и ПН-1, возникает напряжение постоянного тока, которое с помощью встречно включенных обмоток управления закрывает магнитный усилитель МУ-2 и открывает МУ-1. Увеличение дополнительного тока /1 в этом случае компенсирует первоначальное возмущение и натяжение в первой зоне восстанавливается до некоторой заданной величины.
Согласно включенные обмотки управления ОУ-1-1 и ОУ-2-2 выполняют роль положительной обратной связи по скорости (напряжению) при базисном регулировании скорости. Отрицательная обратная связь по скорости электродвигателей внутри секции при пуске, остановке и других динамических режимах
осуществляется за счет обмоток управления ОУ-1-2И ОУ-2-2.
В статике роль этих обмоток аналогична действию ОУ-1-3, ОУ-2-3, т. е. воздействием на ПМ-12 в принципе можно скомпенсировать неличину статической ошибки по натяжению внутри секции. Аналогичного эффекта для регулятора возбуждения можно добиться возствием на сопротивление смещения с-12.
Возмущения, вызывающие рассогласование скоростей соседних секций, также приводят к изменению натяжения ткани между ними, что, с одной стороны, также вызывает перераспределение моментов на валу электродвигателей, обеспечивающее частичную отработку рассогласования, и, с другой стороны, смещение средней точки ПН-2 и появление на ОУ-12-2 потенциала, управляющего магнитным усилителем МУ-12. При этом также произойдет соответствующее изменение скоростей обоих двигателей и восстановление натяжения между секциями до некоторой заданной величины за счет изменения магнитных потоков двигателей.
Перестройка работы привода на любой требуемый уровень натяжения и его контроль легко осуществляются соответствующими задатчиками (ПЗ-1, ПЗ-2).
Таким образом, предлагаемый многодвигательный электропривод, обеспечивая повышенное быстродействие и устойчивость САР в динамике за счет использования регулирования по нагрузке во всех зонах, позволяет для регулирования по отклонению использовать малоходовые датчики натяжения, не увеличивающие габаритов машин. В свою очередь введение корректирующих связей от малоходовых датчиков натяжения, воздействующих на дополнительные регуляторы скорости, позволяет установить требуемое натяжение материала между мащинами и поддерживать его в заданных пределах для механизмов с любым соотношением момента холостого хода механизма и момента натяжения ткани.
Предлагаемый многодвигательный привод проверен в лаборатории НИЭКМИ на роликовой сушильной мащине, предназначенной для обработки ткани с малым натяжением. Проверка подтвердила возможность точной установки и поддерживания постоянства требуемого натял ения ткани в поточных линиях с большим количеством приводных точек без увеличения габаритов машин.
Формула изобретения
Многодвигательный электропривод постоянного тока для обработки в процессе перемещения гибкого деформируемого материала, преимущественно ткани, содержащий несколько пар электродвигателей с последовательным соединением якорных цепей, подключенных к общему источнику питания, и датчики натяжения перемещаемого материала, каждый из которых воздействует на регулятор скорости одной из пар двигателей, отличающийся тем, что, с целью улучшения эксплуатационных характеристик многодвигательного электропривода и расширения диапазона его применения, он снабжен дополнительными регуляторами скоростей по числу приводных двигателей, каладый из которых подключен параллельно относящемуся к нему двигателю, причем ко входу каждого из дополнительных регуляторов подключены выходы дополнительных датчиков натяжения, каждый из которых расположен между транспортирующими органами, приводимыми соответствующей парой двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения гибкого материала | 1975 |
|
SU575311A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Многодвигательный электропривод постоянного тока | 1971 |
|
SU576649A2 |
| Многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом | 1983 |
|
SU1160520A1 |
| Многодвигательный электропривод постоянногоТОКА для пОТОчНОй лиНии C пЕРЕМАТыВАю-щиМ МЕХАНизМОМ | 1979 |
|
SU851721A1 |
| Двухдвигательный электропривод постоянного тока | 1981 |
|
SU978307A1 |
| Многодвигательный электропривод поточной линии | 1983 |
|
SU1171948A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2008 |
|
RU2386740C1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2010 |
|
RU2456740C2 |
| Многодвигательный электропривод | 1979 |
|
SU851720A1 |
оi /wv jLeJ jjwv., -j- v-i-v.-, nD- of-io 08-3OB-f/ V-, OS-m 08-2 PC-}2 OB-3 S..g.. 08- PC-34 Фиг.1 Ф,дН-п .rwvCJ j OS-n PC-mn
