(54) РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1981 |
|
SU961085A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Реверсивный электропривод постоянного тока | 1989 |
|
SU1598094A1 |
| Двухзонный электропривод постоянного тока | 1979 |
|
SU836747A1 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| Реверсивный тиристорный электропри-ВОд C PEBEPCOM пОля | 1979 |
|
SU849400A1 |
| Способ регулирования частоты вращенияэлЕКТРОдВигАТЕля пОСТОяННОгО TOKA | 1979 |
|
SU838990A1 |
| Способ двухзонного регулирования частоты вращения электродвигателя постоянного тока и устройство для его осуществления | 1981 |
|
SU995248A1 |
Изобретение относится к электротехнике а именно к автоматизированному электроприводу, и может быть использовано для установок, где требуется регулирование частоты вращения и момента электропривода в широких пределах.
Известен регулируемый электропривод постоянного тока, содержащий электродвигатель постоянного тока с независимым возбуждением, якорная обмотка которого подключена к источнику тока, выполненному, например, в виде индуктивно-емкостного преобразователя, а обмотка возбуждения подключена через регулятор к источнику задающего напряжения 1.
Известен также регулируемый электропривод постоянного тока, содержащий электродвигатель постоянного тока с независимым возбуждением, якорная обмотка которого подключена к источнику тока, выполненному например, в виде индуктивно-емкостного преобразователя, а обмотка возбуждения через регулятор подключена к последовательно соединенным источнику задающего напряжения и тахогенератору электродвигателя 2.
В известном электроприводе регулирование частоты вращения осуществляется путем изменения крутящего момента двигателя регулированием тока в обмотке возбуждения двигателя. Так как обмотка возбеждения двигателя имеет значительно большую постоянную времени, чем якорная обмотка двигателя, известный регулируемый электропривод обладает значительно меньшим быстродействием по сравнению с электроприводами с регулированием со стороны якорной обмотки двигателя. Быстродействие известного электропривода также снижается за счет ограничения крутящего момента двигателя, так как ток в якорной цепи определяется только параметрами источника тока и остается неизменным как в статическим, так и в динамических режимах работы привода. Кроме того, так как по якорной обмотке двигателя в известном регулируемом электроприводе постоянно протекает номинальный ток двигателя, то прм работе двигателя с самовентиляцией на частотах вращения меньше номинальной это приводит к повышенному нагреву двигателя и снижению его КПД.
Целью изобретения является повышение КПД и быстродействия регулируемого электропривода.
Указанная цель достигается тем, что в него дополнительно введен регулируемый преобразователь, вход которого подключен к последовательно соединенным источнику задающего напряжения и тахогенератору, а выход - параллельно источнику тока.
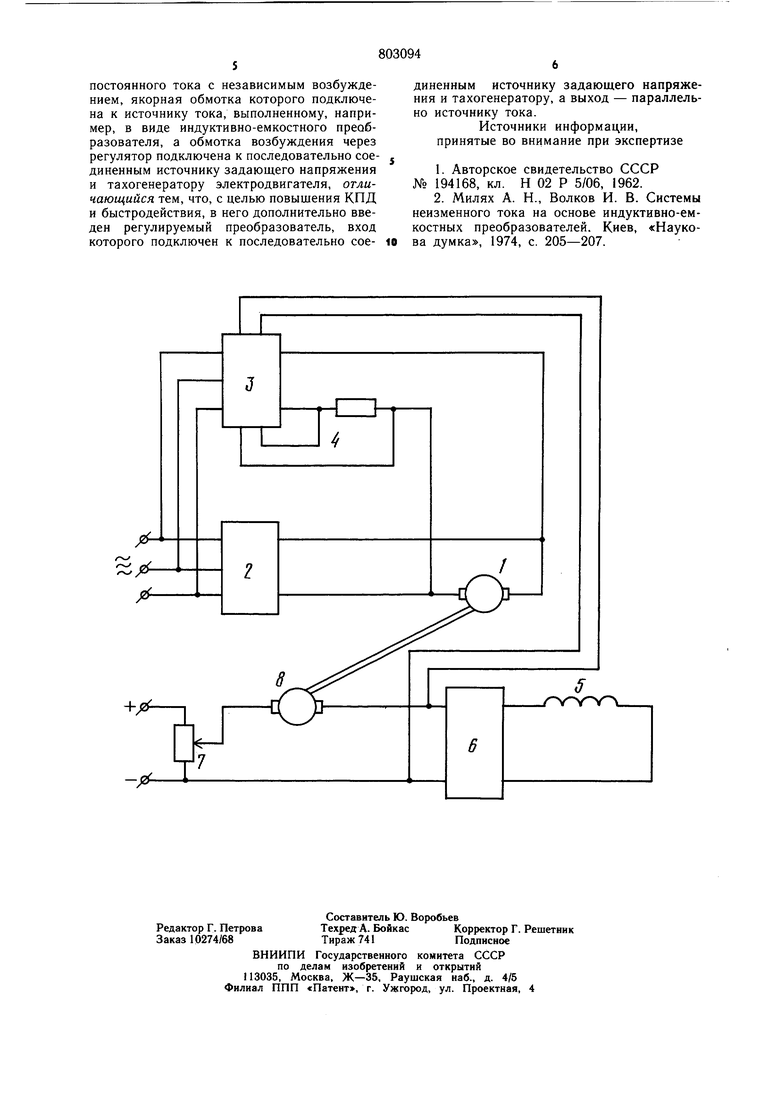
На чертеже представлена функциональная схема регулируемого электропривода постоянного тока.
Электропривод содержит электродвигатель постоянного тока с независимым возбуждением, якорная обмотка 1 которого подключена к источнику 2 тока. Параллельно источнику. 2 к якорной обмотке 1 электродвигателя подключен регулируемый преобразователь 3 переменного напряжения в постоянное в виде тиристорного выпрямителя. Для защиты преобразователя 3 от перегрузок в динамических режимах работы электропривода преобразователь 3 охвачен отрицательной обратной связью 4 по его выходному току. Обмотка 5 возбуждения электродвигателя через усилитель-регулятор 6 подключена к источнику 7 задающего напряжения и тахогенердтору 8, вал которого соединен с валом электродвигателя. Задающий вход преобразователя 3 соединен с источником 7 и тахогенератором 8. Таким образо.м, вход усилителя-регулятора 6 и задающий вход преобразователя 3 включены на сигнал, пропорциональный разности заданного и действительного значения частоты вращения электродвигателя, так как папряжени.е источника 7 и напряжение тахогенератора 8 включены встречно.
Суммарная установленная мощность источника 2 и преобразователя 3 должна быть больше или равна номинальной мощности электродвигателя. Соотношение мощностей источника 2 и преобразователя 3 зависит от требований, предъявляемых к регулируемому электроприводу, от характера изменения момента сопротивления нагрузки, от глубины регулирования частоты вращения и момента электродвигателя.
Электропривод работает следующим образом.
При включении электропривода подается напряжение на якорную цепь 1 и цепь обмотки 5 электродвигателя. При этом на выходе источника 2 устанавливается неизменный по величине ток, а на задающий вход преобразователя 3 и вход усилителярегулятора 6 поступает полное напряжение задания, так как напряжение на тахогенераторе 8 в начальный момент времени равно нулю. Преобразователь 3 открывается и по якорной цепи 1 электродвигателя протекает суммарный ток от источника 2 и преобразователя 3. Значение тока на выходе преобразователя 3 определяется величиной напряжения задания и коэффициентом передачи отрицательной обратной связи 4. При этом суммарный ток в якорной цепи может значительно превышать номинальное значение якорного тока электродвигателя, что обеспечивает форсированное нарастание частоты вращения электродвигателя до заданного значения. Одновременно происходит нарастание тока в обмотке 5 электродвигателя, и электродвигатель разгоняется. По мере возрастания частоты вращения электродвигателя возрастает напряжение на тахогенераторе 8 и уменьшается подаваемая на вход усилителя-регулятора 6 и задающий вход преобразователя 3 разность напряжений источника 7 и тахогенератора 8, так как они включены встречно. Таким образом, происходит разгон электропривода до частоты вращения, при которой момент, развиваемый электродвигателем, будет равен моменту сопротивления нагрузки. При быстрых изменениях нагрузки на валу электродвигателя поддержание заданной частоты вращения электропривода осуществляется, в основном, преобразователем 3, который изменяет якорный ток электродвигателя в ту или иную сторону. Это происходит потому, что быстродействие контура регулирования якорного тока значительно (на порядок и более) выще быстродействия контура регулирования тока возбуждения. При плавном изменении нагрузки и изменении напряжения задания регулирование электроприводом происходит как за счет изменения якорного тока электродвигателя, так и за счет изменения тока в обмотке 5 электродвигателя.
Наличие дополнительного регулируемого преобразователя существенно увеличивает быстродействие электропривода из-за того, что регулирование динамического момента электродвигателя в переходных режимах работы электропривода осуществляется одновременно по якорной цепи и по цепи возбуждения электродвигателя. Дополнительный регулируемый преобразователь также обеспечивает форсировку переходных процессов, так как суммарный ток от источника тока и регулируемого преобразователя в якорной обмотке двигателя во время переходного процесса может значительно превышать номинальный ток электродвигателя. Кроме того, если номинальный выходной ток источника тока меньше номинального тока электродвигателя, то при работе электропривода с нагрузкой меньше номинальной, якорный ток электродвигателя будет также меньше номинального, что обеспечивает снижение нагрева электродвигателя и повышение его КПД.
Формула изобретения
Регулируемый электропривод постоянного тока, содержащий электродвигатель постоянного тока с независимым возбуждением, якорная обмотка которого подключена к источнику тока, выполненному, например, в виде индуктивно-емкостного преобразователя, а обмотка возбуждения через регулятор подключена к последовательно соединенным источнику задающего напряжения и тахогенератору электродвигателя, отличающийся тем, что, с целью повышения КПД и быстродействия, в него дополнительно введен регулируемый преобразователь, вход которого подключен к последовательно сое80310 4 диненным источнику задающего напряжения и тахогенератору, а выход - параллельно источнику тока. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 194168, кл. Н 02 Р 5/06, 1962. 2.Милях А. Н., Волков И. В. Системы неизменного тока на основе индуктивно-емкостных преобразователей. Киев, «Наукова думка, 1974, с. 205-207.
